翱辫别苍3顿で厂尝础惭入门 PyCon Kyushu 2018
10 likes7,449 views

PyCon Kyushu 2018で登壇した資料です。
![Open3D[1]
とは?
? 3Dデータ処理ができるPythonライブラリ
? PCL(Point Cloud Library)みたいなやつ
? 短いコードで3Dデータ処理できる
? 点群表示、法線推定、ICP位置合わせ、3次元再構成などの例
? NYU、TUM、SUN3D、RedwoodなどのRGB-D Datasetに対応
[1] Qian-Yi Zhou, Jaesik Park and Vladlen Koltun, “Open3D: A Modern Library for 3D Data Processing”, arXiv:1801.09847, 2018](https://image.slidesharecdn.com/open3dslam-180630050637/85/Open3D-SLAM-PyCon-Kyushu-2018-4-320.jpg)

![Anaconda[2]
[2] https://www.anaconda.com/download/](https://image.slidesharecdn.com/open3dslam-180630050637/85/Open3D-SLAM-PyCon-Kyushu-2018-7-320.jpg)
![Anacondaの環境構築[3]
? Python 3.6の環境を作る
$ conda create –n py36 python=3.6 anaconda
? Python 2.7の環境を作る
$ conda create –n py27 python=2.7 anaconda
? 環境の確認
$ conda info -e
? 環境に入る
$ activate py36
? 環境から出る
$ deactivate
? 環境の削除
$ conda remove –n py27 -–all
[3] https://qiita.com/supersaiakujin/items/50def6f33b79f9a61b18](https://image.slidesharecdn.com/open3dslam-180630050637/85/Open3D-SLAM-PyCon-Kyushu-2018-8-320.jpg)
![ソースコード[4]
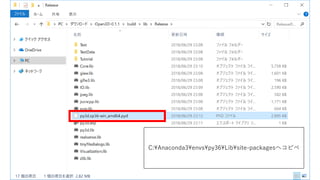
[4] https://github.com/IntelVCL/Open3D/releases](https://image.slidesharecdn.com/open3dslam-180630050637/85/Open3D-SLAM-PyCon-Kyushu-2018-9-320.jpg)






![RGB-D Dataset[5]
? RGB-D SLAMの評価用データセット
? 6カテゴリ、47シーン
? Microsoft Kinect v1センサーによりRGB-Dデータを取得
? モーションキャプチャによる真値
? 評価ツール(Python 2.7)あり
[5] J. Sturm, N. Engelhard, F. Endres, W. Burgard and D. Cremers, "A Benchmark for the Evaluation of RGB-D SLAM Systems",
IROS, 2012, https://vision.in.tum.de/data/datasets/rgbd-dataset](https://image.slidesharecdn.com/open3dslam-180630050637/85/Open3D-SLAM-PyCon-Kyushu-2018-34-320.jpg)
![評価ツール
? evaluate_toolsをダウンロード
? https://svncvpr.in.tum.de/cvpr-ros-
pkg/trunk/rgbd_benchmark/rgbd_benchmark_tools/src/rgbd_bench
mark_tools/
? コマンド実行
? rgbとdepthの関連付け
? (py27) $ python associate.py [rgb.txt] [depth.txt] > [associate.txt]](https://image.slidesharecdn.com/open3dslam-180630050637/85/Open3D-SLAM-PyCon-Kyushu-2018-35-320.jpg)




![評価方法
? evaluate_tools
? コマンド実行
(py27) $ python evaluate_ate.py [結果ファイル] groundtruth.txt --plot
evaluate --verbose > evaluate.txt](https://image.slidesharecdn.com/open3dslam-180630050637/85/Open3D-SLAM-PyCon-Kyushu-2018-42-320.jpg)

翱辫别苍3顿で厂尝础惭入门 PyCon Kyushu 2018
- 2. 自己紹介 ? 藤本賢志(ガチ本) ? 株式会社ナレッジコミュニケーション ? HoloLensアプリケーション開発 ? KumaMCN ? クラッピーチャレンジ ? オペラ×ペッパー ? プログラミング教室 ? ヒャッカソン ? IoTLT@熊本市 ? ヘボコン熊本 ? ガチラボ ? 熊本県民 @sotongshiガチ本
- 4. Open3D[1] とは? ? 3Dデータ処理ができるPythonライブラリ ? PCL(Point Cloud Library)みたいなやつ ? 短いコードで3Dデータ処理できる ? 点群表示、法線推定、ICP位置合わせ、3次元再構成などの例 ? NYU、TUM、SUN3D、RedwoodなどのRGB-D Datasetに対応 [1] Qian-Yi Zhou, Jaesik Park and Vladlen Koltun, “Open3D: A Modern Library for 3D Data Processing”, arXiv:1801.09847, 2018
- 5. 翱辫别苍3顿の导入
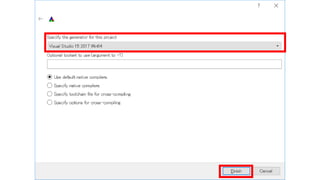
- 6. 開発環境 ? Open3D v0.1.1 ? Windows 10 ? Visual Studio 2017 ? CMake 3.11.3 ? Anaconda ? Python 3.6.5 ? Python 2.7.15
- 8. Anacondaの環境構築[3] ? Python 3.6の環境を作る $ conda create –n py36 python=3.6 anaconda ? Python 2.7の環境を作る $ conda create –n py27 python=2.7 anaconda ? 環境の確認 $ conda info -e ? 環境に入る $ activate py36 ? 環境から出る $ deactivate ? 環境の削除 $ conda remove –n py27 -–all [3] https://qiita.com/supersaiakujin/items/50def6f33b79f9a61b18
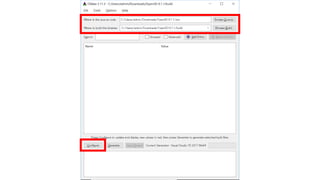
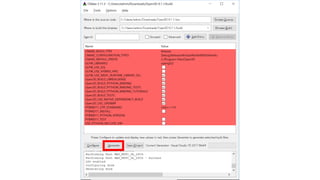
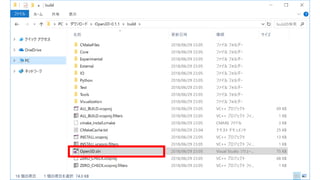
- 14. 颁迟谤濒+厂丑颈蹿迟+叠でビルド
- 16. Tutorial
- 17. Tutorial > Basic
- 20. Tutorial > Misc
- 22. Tutorial > Basic > pointcloud.py
- 23. Tutorial > Basic > rgbd_tum.py
- 24. Tutorial > Basic > icp_registration.py 入力データ Point-to-Point ICP Point-to-Plane ICP
- 25. 厂尝础惭とは?
- 26. Simultaneous Localization and Mapping ? 自己位置推定と地図作成を同時に行うこと ? 自動運転、ロボット、ドローン、AR/VRの分野で用いられる iRobot: ルンバ ZMP: RoboCar Microsoft: HoloLens
- 27. SLAMの歴史 ? PTAM (ISMAR 2007) https://youtu.be/F3s3M0mokNc ? KinectFusion (ISMAR 2011) https://youtu.be/quGhaggn3cQ ? DTAM (ICCV 2011) https://youtu.be/Df9WhgibCQA ? SVO (ICRA 2014) https://youtu.be/2YnIMfw6bJY ? LSD-SLAM (ECCV 2014) https://youtu.be/GnuQzP3gty4 ? ORB-SLAM (TRO 2015) https://youtu.be/8DISRmsO2YQ ? CNN-SLAM (CVPR 2017) https://youtu.be/z_NJxbkQnBU
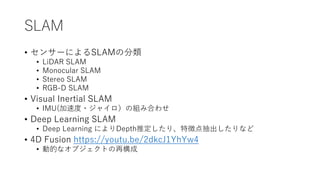
- 28. SLAM ? センサーによるSLAMの分類 ? LiDAR SLAM ? Monocular SLAM ? Stereo SLAM ? RGB-D SLAM ? Visual Inertial SLAM ? IMU(加速度?ジャイロ)の組み合わせ ? Deep Learning SLAM ? Deep Learning によりDepth推定したり、特徴点抽出したりなど ? 4D Fusion https://youtu.be/2dkcJ1YhYw4 ? 動的なオブジェクトの再構成
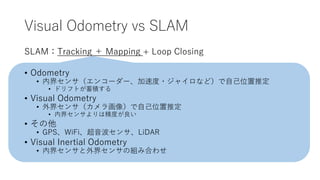
- 29. Visual Odometry vs SLAM SLAM:Tracking + Mapping + Loop Closing ? Odometry ? 内界センサ(エンコーダー、加速度?ジャイロなど)で自己位置推定 ? ドリフトが蓄積する ? Visual Odometry ? 外界センサ(カメラ画像)で自己位置推定 ? 内界センサよりは精度が良い ? その他 ? GPS、WiFi、超音波センサ、LiDAR ? Visual Inertial Odometry ? 内界センサと外界センサの組み合わせ
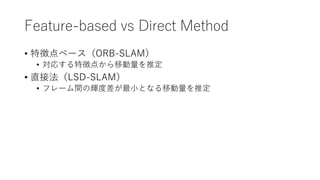
- 30. Feature-based vs Direct Method ? 特徴点ベース(ORB-SLAM) ? 対応する特徴点から移動量を推定 ? 直接法(LSD-SLAM) ? フレーム間の輝度差が最小となる移動量を推定
- 31. Loop Closing ? 一度見た場所を認識して、全体のグローバルマップを最適化 ? Deformation-based Loop Closure for Large Scale Dense RGB-D SLAM ? https://youtu.be/MNw-GeHHSuA ? Bundle Adjustment (バンドル調整) ? Relocalization
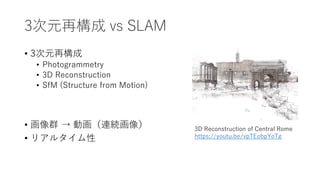
- 32. 3次元再構成 vs SLAM ? 3次元再構成 ? Photogrammetry ? 3D Reconstruction ? SfM (Structure from Motion) ? 画像群 → 動画(連続画像) ? リアルタイム性 3D Reconstruction of Central Rome https://youtu.be/vpTEobpYoTg
- 33. 厂尝础惭の导入
- 34. RGB-D Dataset[5] ? RGB-D SLAMの評価用データセット ? 6カテゴリ、47シーン ? Microsoft Kinect v1センサーによりRGB-Dデータを取得 ? モーションキャプチャによる真値 ? 評価ツール(Python 2.7)あり [5] J. Sturm, N. Engelhard, F. Endres, W. Burgard and D. Cremers, "A Benchmark for the Evaluation of RGB-D SLAM Systems", IROS, 2012, https://vision.in.tum.de/data/datasets/rgbd-dataset
- 35. 評価ツール ? evaluate_toolsをダウンロード ? https://svncvpr.in.tum.de/cvpr-ros- pkg/trunk/rgbd_benchmark/rgbd_benchmark_tools/src/rgbd_bench mark_tools/ ? コマンド実行 ? rgbとdepthの関連付け ? (py27) $ python associate.py [rgb.txt] [depth.txt] > [associate.txt]
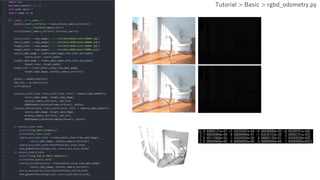
- 36. Tutorial > Basic > rgbd_odometry.py
- 37. 改変 連番の読み込み
- 39. 変換行列をクォータニオンと 平行移動ベクトルに分ける Timestamp tx ty tz qx qy qz qw
- 41. 実験结果
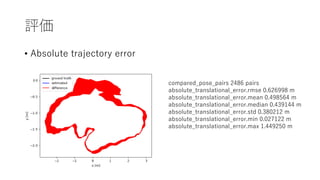
- 42. 評価方法 ? evaluate_tools ? コマンド実行 (py27) $ python evaluate_ate.py [結果ファイル] groundtruth.txt --plot evaluate --verbose > evaluate.txt
- 43. 評価 ? Absolute trajectory error compared_pose_pairs 2486 pairs absolute_translational_error.rmse 0.626998 m absolute_translational_error.mean 0.498564 m absolute_translational_error.median 0.439144 m absolute_translational_error.std 0.380212 m absolute_translational_error.min 0.027122 m absolute_translational_error.max 1.449250 m
- 44. 改善点 ? リアルタイム性に欠ける ? 他の手法を試す ? キーフレーム(KF)からトラッキングする ? 前後のフレームだけではなく周辺のマップを含める ? グローバルマップ最適化(Loop Closing)
- 45. まとめ ? 翱辫别苍3顿の导入 ? Tutorialを実行できた ? SLAM入門 ? RGB-D Datasetを用いて実験できた
- 46. コミュニティに参加してください ? arXiv.org (246 results for all: SLAM) ? コンピュータビジョン勉強会@関東 ? 名古屋CV PRML勉強会 ? 3D勉強会@関東 ? Deep Learning Lab ? HoloMagicians HoloLens Meetup ? KumaMCN ガチラボ
- 47. ご清聴ありがとうございました