Sistem Koordinat
Download as PPTX, PDF6 likes6,199 views

Presentasi BAB II Geodesy Satelit













![Dinamika!
BUMI
Dinamika pergerakan Bumi
mempunyai spektrum yang
sangat luas, dari skala
galaksi sampai skala
pergerakan lokal kerak
bumi
Bumi mengelilingi
matahari dalam orbit
berbentuk ellips
Sumbu panjang ┬▒ 149,6 juta km
Eksentrisitas orbit ┬▒ 0,0167
Periode Orbit 365,24 hari
Kecepatan bumi ┬▒ 29,8 km/s
[Yoder,1995]](https://image.slidesharecdn.com/sistemkoordinat-160413083008/85/Sistem-Koordinat-16-320.jpg)










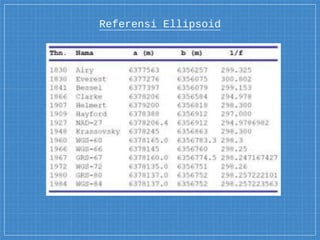
![Berdasarkan Parameter
No. Klasifikasi Parameter
1 Geosentrik (di pusat Bumi)
Lokasi Titik
nol
Toposentrik (di permukaan
Bumi)
Heliosentrik (di pusat
Matahari)
2 Terikat Bumi (Earth-Fixed)
Orientasi Sumbu
Terikat Langit (Space-Fixed)
3 Jarak (Kartesian [X, Y, Z])
Besaran
Koordinat
Sudut dan Jarak (Geodetik [ŽĢ,
╬╗, h])](https://image.slidesharecdn.com/sistemkoordinat-160413083008/85/Sistem-Koordinat-27-320.jpg)











































More Related Content
What's hot (20)
Viewers also liked (20)


















Similar to Sistem Koordinat (20)




















More from aulia rachmawati (6)






Recently uploaded (6)





![materi tot investigasi kecelakaan kerja v2 [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/materitotinvestigasikecelakaankerjav2autosaved-250224170537-c4b15729-thumbnail.jpg?width=560&fit=bounds)
Sistem Koordinat
- 2. ANGGOTA KELOMPOK 2A AULIA R. 3513_35 RASTRA W 3514_14 SEP H. 3514_07SARAH J. 3513_96 NICOLODY 3514_30
- 3. SISTEM KOORDINAT 1. SISTEM DAN KERANGKA REFERENSI KOORDINAT 2. BENTUK DAN UKURAN BUMI 3. DINAMIKA BUMI 4. SISTEM KOORDINAT 5. SISTEM KOORDINAT DALAM GEODESY SATELIT 6. SISTEM KOORDINAT REFERENSI ICRS DAN ITRS 7. WGS 84
- 4. 1 SISTEM DAN KERANGKA REFERENSI KOORDINAT LetŌĆÖs start with the first topic
- 5. KOORDINAT REFERENSI Suatu himpunan dari sumbu - sumbu koordinat bangun geometric yang lainnya, kepada suatu titik yang ditentukan. Realisasi praktis dari system referensi melalui pengukuran dan pengamatan.
- 6. KOORDINAT REFERENSI Suatu metode untuk menentukan posisi titik terhadap kerangka koordinat tertentu. Definisi secara konseptual secara lengkap bagaimana sistem koordinat ditentukan
- 7. Sistem! REFERENSI KOORDINAT Sistem referensi koordinat adalah sebagai realisasi praktis dari Syste mereferensi, sehingga system tersebut dapat digunakan untuk pendeskripsian secara kuantitatif posisi dan pergerakan posisi dan pergerakan titik-titik.
- 8. 2 BENTUK DAN UKURAN BUMI LetŌĆÖs start with the second topic
- 10. Tiram atau cakram yang terapung di permukaan bumi 2500 SM 500 SM Lempeng dasar Bangsa Yunani Kotak persegi panjang 400 SM 495 SM Bola Bangsa Yunani kuno : Phytagoras Bangsa Babilonia Geograf Yunani Kuno
- 11. Buah Jeruk Asam 1683-1718 1643-1727 Buah Jeruk Manis Huygens dan Issac Newton Ellips Putas 1666 J. Cassini French Academy of Science
- 12. Meridian NolEkuatorial Bumi mendekati ellipsoid biaksal Ekuatorial =>> Meridian =>>
- 13. H= h + Na = 6378 km b = 6357 km
- 15. 3 DINAMIKA BUMI LetŌĆÖs start with the third topic
- 16. Dinamika! BUMI Dinamika pergerakan Bumi mempunyai spektrum yang sangat luas, dari skala galaksi sampai skala pergerakan lokal kerak bumi Bumi mengelilingi matahari dalam orbit berbentuk ellips Sumbu panjang ┬▒ 149,6 juta km Eksentrisitas orbit ┬▒ 0,0167 Periode Orbit 365,24 hari Kecepatan bumi ┬▒ 29,8 km/s [Yoder,1995]
- 17. Parameter! ORIENTASI BUMI parameter orientasi Bumi: Ō¢¬ pergerakan sumbu rotasi bumi dalam ruang inersia (Presesi dan Nutasi), Ō¢¬ pergerakan sumbu rotasi bumi relatif terhadap kerak bumi (pergerakan kutub), dan Ō¢¬ flukltuasi dalam kecepatan rotasi bumi [perubahan panjang hari (LOD, length of day) Gaya-gaya yang mempengaruhi rotasi bumi : Ō¢¬ gaya gravitasional dari benda- benda langit lainnya, Ō¢¬ gala tekan (loadingl atmosfer dan air laut, serta Ō¢¬ Pergerakan massa baik di dalam bumi, daratan, lautan' dan atmosfer, maupun pergerakan dari lempeng-lempeng Bumi
- 18. Presesi dan Nutasi! Presesi adalah pergeseran orientasi sumbu rotasi Bumi secara perlahan- lahan setiap satu kali putaran. Bumi disebut juga dengan presesi equinox. Posisi Bumi dalam orbitnya ketika mengitari Matahari pada titik solstice dan titik equinox akan berubah secara perlahan Nutasi adalah gerak irregular dalam order beberapa detik busur pada sumbu rotasi Bumi. Nutasi pada planet terjadi akibat efek pasang surut (tidal efek), mrnyrbabkan presesi equinox berbeda dari waktu ke waktu sehingga kecepatan presesi menjadi tidak konstan.
- 20. Polar! MOTION Pergerakan kutub (Polar motion) adalah pergerakan sumbu rotasi bumi relatif terhadap badan atau kerak bumi sendiri. Polar motion atau gerak kutub yang dapat diperkirakan hanya dalam beberapa bulan, karena ia terpengaruhi oleh hal-hal yang cepat berubah dan tidak dapat diprediksi seperti pasang surut, kecepatan dan arah angin serta gerak perut Bumi. tiga komponen utama Pergerakan kutub (Polar motion) yaitu (IERS,2000): Ō¢¬ Osilasi bebas ŌåÆ elastisitas (non-igidity Ō¢¬ Osilasi tahunan ŌåÆ perpindahan massa air Ō¢¬ Komponen sekular ŌåÆ berupa pergeseran (dift)
- 22. Perubahan! PANJANG HARI (LOD) Kecepatan rotasi bumi tidak konstan, sehingga menyebabkan adanya perubahan Variasi LOD yang mencakup: Ō¢¬ Variasi yang dapat diprediksi Ō¢¬ Variasi yang sifatnya tidak teratur, yang dapat dibagi menjadi komponen-komponen decadal, interannual, seasonal, and intrseasonal components fluktuasi pada LOD secara umum dapat diklasifikasikan sebagai: Ō¢¬ Gaya luar yang bekerja pada Bumi Ō¢¬ Adanya perubahan-perubahan momen inersia dari Bumi, yang disebabkan adanya deformasi yang sifatnya peiodik
- 24. Pengamatan! PARAMETER ORIENTASI BUMI Parameter-parameter orientasi Bumi yang digunakan saat ini (Dickey, 1995): Ō¢¬ teknik klasik (seperti astrometri optik dan okultasi Bulan), dan Ō¢¬ teknik-teknik geodesi satelit (seperti VLBI, SLR, dan GPS).
- 25. 4 SISTEM KOORDINAT LetŌĆÖs start with the fourth topic
- 26. Terdapat 3 pendefinisian sistem koordinat : Ō¢¬ Lokasi titik asal (titik nol) dari system koordinat Ō¢¬ Orientasi dari sumbu-sumbu koordinat Ō¢¬ Besaran (kartesian, curvilinear) yang digunakan untuk mendefinisikan posisi suatu titik dalam system koordinat tersebut.
- 27. Berdasarkan Parameter No. Klasifikasi Parameter 1 Geosentrik (di pusat Bumi) Lokasi Titik nol Toposentrik (di permukaan Bumi) Heliosentrik (di pusat Matahari) 2 Terikat Bumi (Earth-Fixed) Orientasi Sumbu Terikat Langit (Space-Fixed) 3 Jarak (Kartesian [X, Y, Z]) Besaran Koordinat Sudut dan Jarak (Geodetik [ŽĢ, ╬╗, h])
- 28. 5 SISTEM KOORDINAT DALAM GEODESY SATELIT LetŌĆÖs start with the fifth topic
- 29. Sistem Koordinat dalam Geodesi Satelit Ō¢¬ CIS (Coventional Inertial System) merupakan sistem koordinat referensi yang terikat dengan langit. Dalam Ilmu Geodesi Satelit, CIS digunakan untuk pendeskripsian posisi dan pergerakan satelit Ō¢¬ CTS (Coventional Terrestrial System) merupakan sistem koordinat referensi yang terikat dengan bumi. Dalam Ilmu Geodesi Satelit, CTS digunakan untuk pendeskripsian posisi dan pergerakan titik-titik di permukaan bumi Ō¢¬ Sistem Ellipsoid referensi merupakan bentuk matematis dari bumi yang mendckati bentuk geoid
- 30. Hubungan CIS dan CTS
- 31. Hubungan CTS dan Ellipsoid
- 32. 6 SISTEM KOORDINAT REFERENSI ICRS DAN ITRS LetŌĆÖs start with the sixth topic
- 33. ICRS Karakteristik dari sistem referensi ICRS adalah (ERS, 2000): Ō¢¬ Titik Nol sistem koordinat adalah pusat massa (barycentePJ dari sistem Matahari dalam ker├źngka relativitas. Ō¢¬ Sumbu-X mengarah ke titik semi (vernal equinox) dari ERS,Dalam hal ini nilai nol dari asensiorekta ditetapkan dari nilai asehsiorekta kuasar 3C 273B. Ō¢¬ Sumbu-Z mengarah ke CEP dari ERS yang didefinisikan oleh model konvensi dari IAU. Ō¢¬ Sumbu-Y tegak lurus sumbu-sumbuX dan Z, dan membentuk sistem koordinat tangan-kanan (right-handed system); dimana sumbu-sumbu X dan Y terletak pada bidang ekuator (mean equator) Bumi pada epok J2000.0.
- 34. Acuan ICRS Menjelaskan tentang Sistem Acuan ICRS (International Celestial Reference System) dengan gambar bola langit dengan bumi sebagai porosnya. Ekuator bumi dan bidang orbit bumi diproyeksikan pada bidang bola langit. Sistem acuan ICRS adalah standar sistem acuan langit yang dipakai saat ini oleh International Astronomical Union (IAU).
- 35. Internasional Terrestrial Reference System (ITRS) adalah sistem referensi spasial dunia yang ikut berrotasi dengan Bumi dalam gerakan diurnal di ruang angkasa. IERS bertugas untuk menyediakan referensi global untuk masyarakat astronomi, geodesi dan geofisika, dan mengawasi realisasi ITRS. Realisasi dari ITRS diproduksi oleh IERS Pusat Produk ITRS (ITRS-PC) di bawah nama ITRF. Koordinat ITRF diperoleh dengan kombinasi solusi TRF dihitung oleh pusat analisis IERS menggunakan pengamatan teknik Space Geodesi (GPS, VLBI, SLR, LLR dan Doris). Mereka semua menggunakan jaringan stasiun yang terletak di seluruh bumi. ITRS
- 36. karakteristiknya : Ō¢¬ Sistem geosentrik, dimana pusat massanya didefinisikan untuk seluruh bumi, termasuk lautan dan atmosfer. Ō¢¬ Satuan panjang yang digunakan adalah meter. Ō¢¬ Sumbu-Z mengarah ke kutub CTP yang dinamakan IRP (IERS Reference Pole). Ō¢¬ Sumbu-X berada dalam bidang meredian Greenwich yang dinamakan IRM (IERS Reference Meredian) dan terletak pada bidang ekuator bumi. Ō¢¬ Sumbu-Y tegak lurus dengan sumbu-sumbu X dan Z dan membentuk system koordinat tangan kanan. Ō¢¬ Evolusi waktu dari orientasi sistem koordinat dipastikan dengan menerapkan kondisi no net- rotation dalam konteks pergerakan tektonik (horizontal) untuk seluruh permukaan bumi.
- 37. 7 WORLD GEODETIC SYSTEM 1984 (WGS 84) LetŌĆÖs start with the last topic
- 38. WGS 84 adalah sistem yang saat ini digunakan oleh sistem navigasi satelit GPS (Global Positioning System) berdasarkan peningkatan kualitas dari WGS 84 yang dilakukan secara berkesinambungan, sudah dikenal tiga sistem yaitu WGS 84, WGS 84 (G730), dan WGS 84 (G873).
- 39. Karakteristik WGS 84 Ō¢¬ Sistem geosentrik dimana pusat masanya didefinisikan untuk seluruh bumi, termasuk lautan dan atmosfer. Ō¢¬ Skalanya adalah kerangka lokal bumi, dalam konteks teori relativitas grativasi. Ō¢¬ Evolusi waktu dari orientasi sistem koordinat tidak menyebabkan adanya residual dari rotasi global terhadap kerak bumi
- 40. Thanks! ANY QUESTIONS? You can find me at: @kelasgeosat