įšĪū≤űĺĪ≥‹≥ĺ§Ú”√§§§Ņ3īő‘™•Í•Ę•Ž•Ņ•§•ŗ•«©`•Ņ§őŅ… ”ĽĮ§ň§ń§§§∆
Download as pptx, pdf31 likes17,024 views

FOSS4G 2015 Hokkaido§őįkĪŪŔYŃŌ§ň§ §Í§ř§Ļ°£



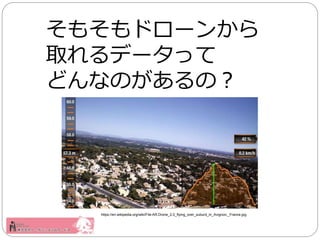






įšĪū≤űĺĪ≥‹≥ĺ§Ú”√§§§Ņ3īő‘™•Í•Ę•Ž•Ņ•§•ŗ•«©`•Ņ§őŅ… ”ĽĮ§ň§ń§§§∆
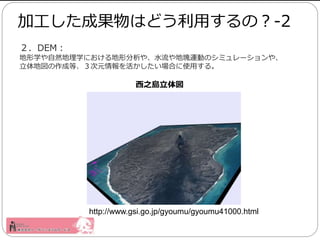
- 5. •…•Ū©`•ů§« ěńļ¶ĺ»÷ķĶ»§ň Ļ§®§Ž •∑•Ļ•∆•ŗ◊ų§ž§ §§§ę£Ņ DFID - ”ĘĻķĻķŽHť_įk ° CC BY 3.0 •Õ•—©`•ŽĶō’ū§«§ő•…•Ū©`•ů§Ú Ļ§√§Ņěńļ¶ĺ»÷ķ https://www.flickr.com/photos/dfid/16691214064
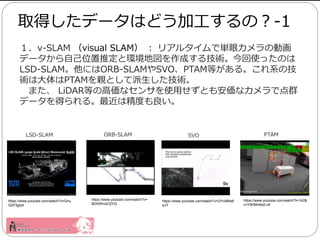
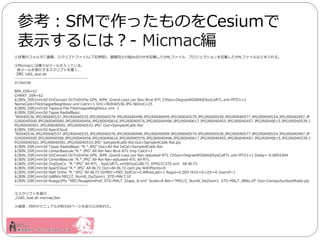
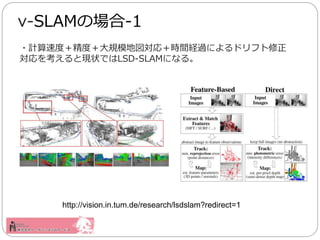
- 11. £Ī£ģv-SLAM £®visual SLAM£© £ļ •Í•Ę•Ž•Ņ•§•ŗ§«Ög—Ř•ę•Š•ť§őĄ”Ľ≠ •«©`•Ņ§ę§ť◊‘ľļőĽ÷√Õ∆∂®§»≠hĺ≥ĶōáŪ§Ú◊ų≥…§Ļ§Žľľ–g°£ĹŮĽō Ļ§√§Ņ§ő§Ō LSD-SLAM°£ňŻ§ň§ŌORB-SLAM§šSVO°ĘPTAMĶ»§¨§Ę§Ž°£§≥§žŌĶ§őľľ –g§ŌīůŐŚ§ŌPTAM§Ú”H§»§∑§∆Ň……ķ§∑§Ņľľ–g°£ §ř§Ņ°Ę LiDARĶ»§őłŖĀż§ •Ľ•ů•Ķ§Ú Ļ”√§Ľ§ļ§»§‚į≤Āż§ •ę•Š•ť§«Ķ„»ļ •«©`•Ņ§ÚĶ√§ť§ž§Ž°£◊ÓĹŁ§Ōĺę∂»§‚Ńľ§§°£ »°Ķ√§∑§Ņ•«©`•Ņ§Ō§…§¶ľ”Ļ§§Ļ§Ž§ő£Ņ-1 https://www.youtube.com/watch?v=Gnu QzP3gty4 LSD-SLAM ORB-SLAM SVO PTAM https://www.youtube.com/watch?t=142& v=Y9HMn6bd-v8 https://www.youtube.com/watch?v=2YnIMfw6 bJY https://www.youtube.com/watch?v= 8DISRmsO2YQ
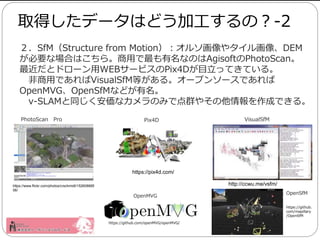
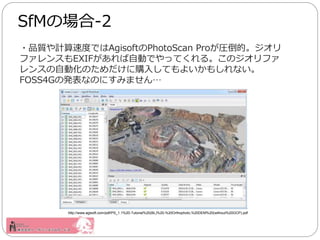
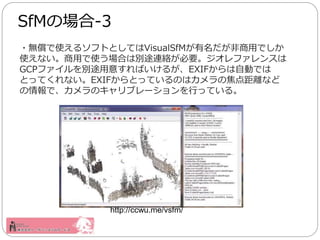
- 12. £≤£ģSfM£®Structure from Motion£©£ļ•™•Ž•ĹĽ≠Ō٧š•Ņ•§•ŽĽ≠ŌŮ°ĘDEM §¨Īō“™§ ąŲļŌ§Ō§≥§Ń§ť°£…Ő”√§«◊Ó§‚”–√Ż§ §ő§ŌAgisoft§őPhotoScan°£ ◊ÓĹŁ§ņ§»•…•Ū©`•ů”√WEB•Ķ©`•”•Ļ§őPix4D§¨ńŅŃʧ√§∆§≠§∆§§§Ž°£ ∑«…Ő”√§«§Ę§ž§–VisualSfMĶ»§¨§Ę§Ž°£•™©`•◊•ů•Ĺ©`•Ļ§«§Ę§ž§– OpenMVG°ĘOpenSfM§ §…§¨”–√Ż°£ v-SLAM§»Õ¨§ł§Įį≤Āż§ •ę•Š•ť§ő§Ŗ§«Ķ„»ļ§š§Ĺ§őňŻ«ťąů§Ú◊ų≥…§«§≠§Ž°£ »°Ķ√§∑§Ņ•«©`•Ņ§Ō§…§¶ľ”Ļ§§Ļ§Ž§ő£Ņ-2 https://www.flickr.com/photos/crschmidt/152608885 06/ PhotoScan Pro Pix4D https://pix4d.com/ VisualSfM http://ccwu.me/vsfm/ OpenMVG OpenSfM https://github. com/mapillary /OpenSfM https://github.com/openMVG/openMVG/
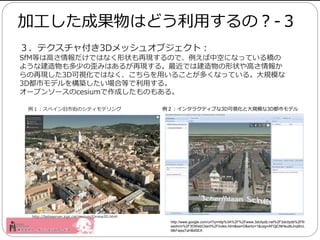
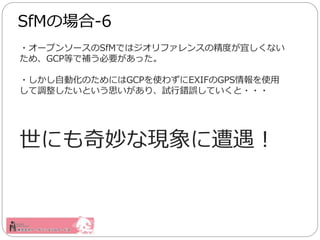
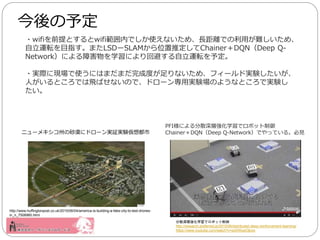
- 18. £ī£ģ•›•§•ů•»•Į•ť•¶•…£ļSfM§šv-SLAM°Ę LiDAR§«»°Ķ√§∑§ŅĶ„»ļ •«©`•Ņ°£őÔŐŚ’J◊R§š’Ōļ¶őÔĽōĪ‹Ķ»§ő◊‘Ą”Ŗ\‹ěŌĶ§« Ļ§√§Ņ§Í§Ļ§Ž°£ĹŮ Ľō§Ō3īő‘™ĶōáŪ§ň Ļ”√§∑§ř§Ļ°£ ľ”Ļ§§∑§Ņ≥…ĻŻőÔ§Ō§…§¶ņŻ”√§Ļ§Ž§ő£Ņ-£ī http://subspace.nicta.com.au/#publicDemos https://www.youtube.com/watch?v=r9LegSK6MfU ņż£Ī£ļCesium§«§ő•›•§•ů•»•Į•ť•¶•…ĪŪ ĺņż ņż£≤£ļ•›•§•ů•»•Į•ť•¶•…§Ú”√§§§Ņ◊‘∂Į‘ň‹ěņż
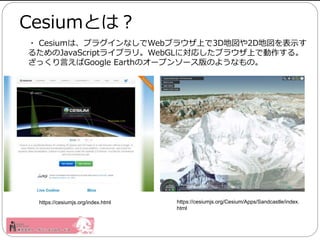
- 23. ? Cesium§Ō°Ę•◊•ť•į•§•ů§ §∑§«Web•÷•ť•¶•∂…Ō§«3DĶōáŪ§š2DĶōáŪ§ÚĪŪ ĺ§Ļ §Ž§Ņ§Š§őJavaScript•ť•§•÷•ť•Í°£WebGL§ňĆ̏ͧ∑§Ņ•÷•ť•¶•∂…Ō§«Ą”◊ų§Ļ§Ž°£ §∂§√§Į§Í—‘§®§–Google Earth§ő•™©`•◊•ů•Ĺ©`•Ļįś§ő§Ť§¶§ §‚§ő°£ Cesium§»§Ō£Ņ https://cesiumjs.org/index.html https://cesiumjs.org/Cesium/Apps/Sandcastle/index. html
- 24. £Ī£ģGoogle Earth§őWEBįś§‚◊Ó≥űŅľ§®§Ņ§¨°Ę§Ĺ§‚§Ĺ§‚¨FērĶ„§«◊Ó–¬§ő Chrome§«Ą”◊ų§∑§ §§§ő§«ļÚ—a§ę§ťÕ‚§ž§Ņ°£ £≤£ģ Google EarthĶ»§ő…Ő”√•Ę•◊•Í§ŌĽýĶ◊≤Ņ∑÷§Ú§§§ł§ž§ §§§ő§«°Ę”Ż§∑§§ôCń‹ §Ú◊‘«į§«Ćg◊į§«§≠§ §§§Ņ§Š°Ę•™©`•◊•ů•Ĺ©`•Ļ§«§Ę§Ž§ő§ŌĪōŪö“™ľĢ§ņ§√§Ņ°£ Cesium§ŌĽýĶ◊≤Ņ∑÷§Ō§‚§»§Ť§Í°ĘUI§‚īů∑ý§ňČšłŁŅ…ń‹§ §ő§‚§ę§ §Í•›•§•ů•»łŖ §§°£ £≥£ģWebGL§ňĆ̏ͧ∑§Ņ•÷•ť•¶•∂§«§Ę§ž§–∂ňń©§ÚŖx§–§ §§°£ £ī£ģ•…•Ū©`•ů§ę§ť§ő•«©`•Ņ§ÚíQ§¶…Ō§«°Ę•Ķ©`•–§ę§ť•Í•Ę•Ž•Ņ•§•ŗ§«īůŃŅ§ő•«©` •Ņ§ÚíQ§¶§ň§Ō•÷•ť•¶•∂…Ō§«WebSocket§šWebRTCĶ»§őHTML5ľľ–g§»”HļÕ–‘§¨ łŖ§§§‚§ő§¨Ńľ§ę§√§Ņ°£ £Ķ£ģKML§šGeoJSONĶ»ŮZ»ĺ§Ŗ…Ó§§•«©`•Ņ•Ĺ©`•Ļ§Ú§Ĺ§ő§ř§ř Ļ§®§Ž§Ņ§Š°ĘŖ^»• §őŔYģb§ÚĽÓ§ę§∑§š§Ļ§§°£ § §ľCesium£Ņ£≠£Ī
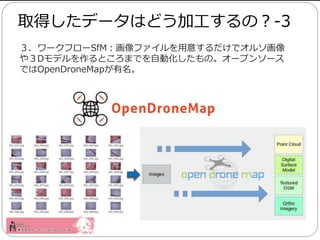
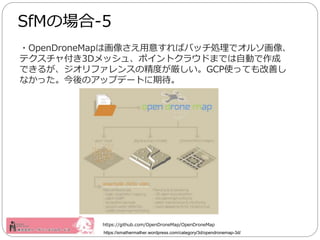
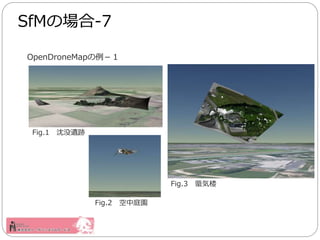
- 36. SfM§őąŲļŌ-8 OpenDroneMap§őņż£≠£≤ Fig.£ī Ņ’÷–•Ŕ•ů•Ń Fig.£Ķ Ļ¬∂ņ§ Ľů–«
- 37. SfM§őąŲļŌ-9 OpenSfM§őņż Fig.1 √Ż◊ī§∑§¨§Ņ§§Ļęą@ Fig.2 √Ż◊ī§∑§¨§Ņ§§≤©őÔĻ›
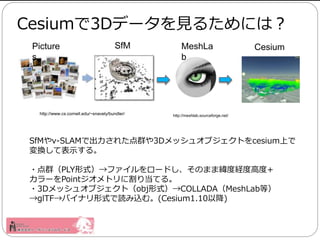
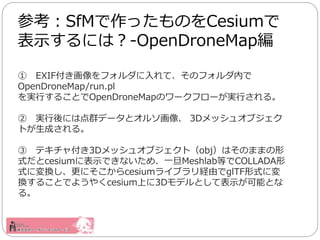
- 39. ĘŔ EXIFł∂§≠Ľ≠Ō٧ڕ’•©•Ž•ņ§ň»Ž§ž§∆°Ę§Ĺ§ő•’•©•Ž•ņń৫ OpenDroneMap/run.pl §ÚĆg––§Ļ§Ž§≥§»§«OpenDroneMap§ő•Ô©`•Į•’•Ū©`§¨Ćg––§Ķ§ž§Ž°£ Ęŕ Ćg––ŠŠ§ň§ŌĶ„»ļ•«©`•Ņ§»•™•Ž•ĹĽ≠ŌŮ°Ę 3D•Š•√•∑•Ś•™•÷•ł•ß•Į •»§¨…ķ≥…§Ķ§ž§Ž°£ ĘŘ •∆•≠•Ń•„ł∂§≠3D•Š•√•∑•Ś•™•÷•ł•ß•Į•»£®obj£©§Ō§Ĺ§ő§ř§ř§ő–ő ŧņ§»cesium§ňĪŪ 姫§≠§ §§§Ņ§Š°Ę“ĽĶ©MeshlabĶ»§«COLLADA–ő ŧňČšďQ§∑°ĘłŁ§ň§Ĺ§≥§ę§ťcesium•ť•§•÷•ť•ÍĹU”…§«glTF–ő ŧňČš ďQ§Ļ§Ž§≥§»§«§Ť§¶§š§Įcesium…Ō§ň3D•‚•«•Ž§»§∑§∆ĪŪ 姨Ņ…ń‹§»§ §Ž°£ ≤őŅľ£ļSfM§«◊ų§√§Ņ§‚§ő§ÚCesium§« ĪŪ ĺ§Ļ§Ž§ň§Ō£Ņ-OpenDroneMapĺé
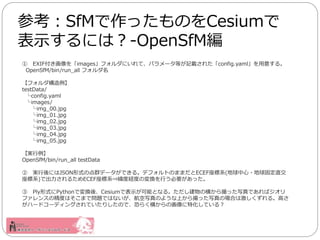
- 40. ĘŔ EXIFł∂§≠Ľ≠Ō٧ڰłimages°Ļ•’•©•Ž•ņ§ň§§§ž§∆°Ę•—•ť•Š©`•ŅĶ»§¨”õ›d§Ķ§ž§Ņ°łconfig.yaml°Ļ§Ú”√“‚§Ļ§Ž°£ OpenSfM/bin/run_all •’•©•Ž•ņ√Ż °ĺ•’•©•Ž•ņėč‘žņż°Ņ testData/ ©łconfig.yaml ©łimages/ ©łimg_00.jpg ©łimg_01.jpg ©łimg_02.jpg ©łimg_03.jpg ©łimg_04.jpg ©łimg_05.jpg °ĺĆg––ņż°Ņ OpenSfM/bin/run_all testData Ęŕ Ćg––ŠŠ§ň§ŌJSON–ő ŧőĶ„»ļ•«©`•Ņ§¨§«§≠§Ž°£•«•’•©•Ž•»§ő§ř§ř§ņ§»ECEF◊ýėňŌĶ(Ķō«Ú÷––ń?Ķō«ÚĻŐ∂®÷ĪĹĽ ◊ýėňŌĶ)§«≥ŲѶ§Ķ§ž§Ž§Ņ§ŠECEF◊ýėňŌĶ?ĺē∂»ĹU∂»§őČšďQ§Ú––§¶Īō“™§¨§Ę§√§Ņ°£ ĘŘ Ply–ő ŧňPython§«ČšďQŠŠ°ĘCesium§«ĪŪ 姨Ņ…ń‹§»§ §Ž°£§Ņ§ņ§∑Ĺ®őÔ§őļŠ§ę§ťīť§√§Ņ–ī’ś§«§Ę§ž§–•ł•™•Í •’•°•ž•ů•Ļ§őĺę∂»§Ō§Ĺ§≥§ř§«ÜĖÓ}§«§Ō§ §§§¨°ĘļĹŅ’–ī’ś§ő§Ť§¶§ …Ō§ę§ťīť§√§Ņ–ī’ś§őąŲļŌ§Ōľ§§∑§Į§ļ§ž§Ž°£łŖ§Ķ §¨•Ō©`•…•≥©`•«•£•ů•į§Ķ§ž§∆§§§Ņ§Í§∑§Ņ§ő§«°ĘŅ÷§ť§ĮļŠ§ę§ť§őĽ≠Ō٧ňŐōĽĮ§∑§∆§§§Ž£Ņ ≤őŅľ£ļSfM§«◊ų§√§Ņ§‚§ő§ÚCesium§« ĪŪ ĺ§Ļ§Ž§ň§Ō£Ņ-OpenSfMĺé
- 41. ĘŔ»ő“‚§ő•’•©•Ž•ņ§ňĽ≠ŌŮ°Ę•Ļ•Į•Í•◊•»•’•°•§•Ž(Ō¬”õ≤ő’’)°ĘĽ≠ŌŮÕ¨ Ņ§őĹM§ŖļŌ§Ô§Ľ§Ú”õ›d§∑§ŅXML•’•°•§•Ž°Ę•◊•Ū•ł•ß•Į•∑•Á•ů§Ú”õ›d§∑§ŅXML•’•°•§•Ž§ §…§Ú»Ž§ž§Ž°£ ĘŕMicmac§ň§ŌėĒ°©§ •ń©`•Ž§¨»Ž§√§∆§§§Ž°£ łų•ń©`•Ž§ÚĆg––§Ļ§Ž•Ļ•Į•Í•◊•»§ÚēݧĮ°£ °ĺņż°ŅUAS_test.sh ----------------------------------------------- #!/bin/sh BIN_DIR=$1 CHANT_DIR=$2 ${BIN_DIR}mm3d OriConvert OriTxtInFile GPS_WPK_Grand-Leez.csv Nav-Brut-RTL ChSys=DegreeWGS84@SysCoRTL.xml MTD1=1 NameCple=FileImagesNeighbour.xml CalcV=1 ImC=R0040536.JPG NbImC=25 ${BIN_DIR}mm3d Tapioca File FileImagesNeighbour.xml -1 ${BIN_DIR}mm3d Tapas RadialBasic "R0040536.JPG|R0040537.JPG|R0040535.JPG|R0040578.JPG|R0040498.JPG|R0040499.JPG|R0040579.JPG|R0040538.JPG|R0040577.JPG|R0040534.JPG|R0040497.JP G|R0040500.JPG|R0040580.JPG|R0040456.JPG|R0040616.JPG|R0040576.JPG|R0040496.JPG|R0040617.JPG|R0040455.JPG|R0040457.JPG|R0040615.JPG|R0040539.J PG|R0040501.JPG|R0040581.JPG|R0040533.JPG" Out=Sample4Calib-Rel ${BIN_DIR}mm3d AperiCloud "R0040536.JPG|R0040537.JPG|R0040535.JPG|R0040578.JPG|R0040498.JPG|R0040499.JPG|R0040579.JPG|R0040538.JPG|R0040577.JPG|R0040534.JPG|R0040497.JP G|R0040500.JPG|R0040580.JPG|R0040456.JPG|R0040616.JPG|R0040576.JPG|R0040496.JPG|R0040617.JPG|R0040455.JPG|R0040457.JPG|R0040615.JPG|R0040539.J PG|R0040501.JPG|R0040581.JPG|R0040533.JPG" Sample4Calib-Rel Out=Sample4Calib-Rel.ply ${BIN_DIR}mm3d Tapas RadialBasic "R.*.JPG" Out=All-Rel InCal=Sample4Calib-Rel ${BIN_DIR}mm3d CenterBascule "R.*.JPG" All-Rel Nav-Brut-RTL tmp CalcV=1 ${BIN_DIR}mm3d OriConvert OriTxtInFile GPS_WPK_Grand-Leez.csv Nav-adjusted-RTL ChSys=DegreeWGS84@SysCoRTL.xml MTD1=1 Delay=-0.0854304 ${BIN_DIR}mm3d CenterBascule "R.*.JPG" All-Rel Nav-adjusted-RTL All-RTL ${BIN_DIR}mm3d ChgSysCo "R.*JPG" All-RTL SysCoRTL.xml@SysCoBL72_EPSG31370.xml All-BL72 ${BIN_DIR}mm3d AperiCloud "R.*.JPG" All-BL72 Out=All-BL72-cam.ply WithPoints=0 ${BIN_DIR}mm3d Malt Ortho "R.*JPG" All-BL72 DirMEC=MEC DefCor=0 AffineLast=1 Regul=0.005 HrOr=0 LrOr=0 ZoomF=1 ${BIN_DIR}mm3d to8Bits MEC/Z_Num8_DeZoom1_STD-MALT.tif ${BIN_DIR}mm3d Nuage2Ply "MEC/NuageImProf_STD-MALT_Etape_8.xml" Scale=8 Attr="MEC/Z_Num8_DeZoom1_STD-MALT_8Bits.tif" Out=CanopySurfaceModel.ply ----------------------------------------------- ĘŘ•Ļ•Į•Í•◊•»§ÚĆg–– ./UAS_test.sh micmac/bin °ýł–ŌŽ£ļPDF§ő•ř•ň•Ś•Ę•Ž§¨ľs350•ŕ©`•ł§‚§Ę§Í–ń§¨’اž§Ņ°£ ≤őŅľ£ļSfM§«◊ų§√§Ņ§‚§ő§ÚCesium§« ĪŪ ĺ§Ļ§Ž§ň§Ō£Ņ- Micmacĺé
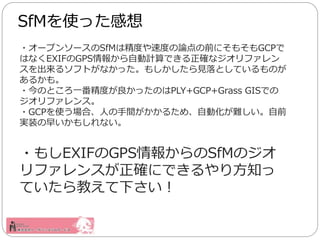
- 50. ◊∑”õ •…•Ū©`•ů§ÚÔw§–§Ļ«į§ň’i§ů§«§™§§§Ņ§Ř§¶§¨§Ť§§ŔYŃŌ http://dil-opac.bosai.go.jp/publication/nied_report/PDF/81/81- 5inoue.pdf ∑ņěńŅ∆—ßľľ–g—–ĺŅňý—–ĺŅąůłś Ķŕ 81 ļŇ ◊‘»Ľěńļ¶’{Ėň—–ĺŅ§ő§Ņ§Š§ő •ř•Ž•Ń•≥•◊•Ņ©`Ņ’īťľľ–g ÷Ý£ļ ĺģ…Ō Ļę ńŕ…Ĺ◊Į“Ľņ… ‚ŹńĺĪ»ńő◊” •…•Ū©`•ů§Ú”√§§§Ņ‘ĒľöDEM £®0.5m•Š•√•∑•Ś£©§š•™•Ž•Ĺ Ľ≠ŌŮ◊ų≥…§»Ŗ\”√§ňḈĻ§ŽŅľ≤ž §Ú§ř§»§Š§Ņ§‚§ő°£≤Ŕ◊ų∑Ĺ∑®§ņ §Ī§«§Ō§ §Į ¬Ļ §šĪ£Íď§ §…§ň §‚—‘ľį§∑§∆§™§Í∑«≥£§ňéŕĻ†§« §Ť§Į§ř§»§ř§√§∆§§§Ž°£ •™•Ļ•Ļ•Š