



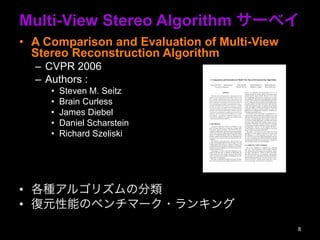
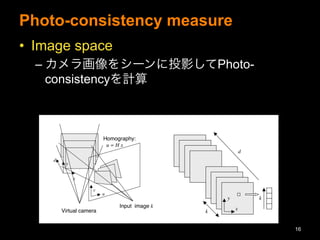
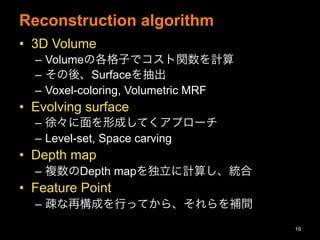

![Benchmark Datasets
21
bird dogs
lti-view datasets with laser-scanned 3D models.
317 camera positions and orientations for the temple
gaps are due to shadows. The 47 cameras correspond-
g dataset are shown in blue and red, and the 16 sparse
only in red.
at serves as an initial estimate of scene geom-
31,47,48].
tion of 640 × 480 pixels att
arm. At this resolution, a pix
0.25mm on the surface of th
10cm × 16cm × 8cm, and th
The system was calibrated
tion grid from 68 viewpoints
[61] to compute intrinsic an
these parameters, we compu
and rotational offset relative t
abling us to determine the cam
as a function of any desired a
The target object sits on
center of the gantry sphere an
lights. Because the gantry c
certain viewpoints, we double
two different arm con?gurat
images. After shadowed im
we obtained roughly 80% cov
resulting images, we created
corresponding to a full hemis
temple temple model
temple
dino
カメラ配置??47視点
カメラ解像度?640x480
Temple
10x16x8 cm
Dino
7x9x7 cm](https://image.slidesharecdn.com/presentation-150327102027-conversion-gate01/85/28th-CV-3-21-320.jpg)

28th CV勉強会@関東 #3
- 1. 第28回 CV勉強会@関東 コンピュータビジョン 最先端ガイド5 Multi-View Stereo #3 Mar. 28, 2015 Hiroki Mizuno 1
- 2. 話す場所 ?? 複数画像からの三次元復元手法 1.? はじめに 2.? システム概要と構成上の注意 1.? 画像収集 2.? カメラパラメータ推定 3.? 密な形状復元 1.? 最先端のMVS研究例 3.? 多眼ステレオ (Multi-View Stereo) 1.? フォトメトリックコンシステンシー 2.? デプスマップ復元 3.? デプスマップからのメッシュ復元 4.? 復元結果 4.? むすび 2
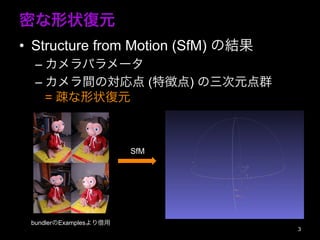
- 3. 密な形状復元 ?? Structure from Motion (SfM) の結果 –?カメラパラメータ –?カメラ間の対応点 (特徴点) の三次元点群 = 疎な形状復元 3 SfM bundlerのExamplesより借用
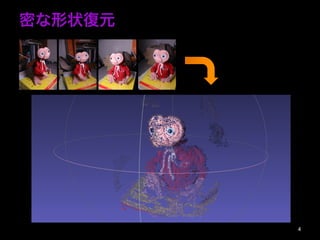
- 4. 密な形状復元 4
- 7. Multi-View Stereo ?? What's Multi-View Stereo –?キャリブレーション済みの多視点画像から高 精度?高密度な三次元形状復元 ?? 長所 –?高解像度 –?撮影速度 –?価格 ?? 短所 –?テクスチャが必要 –?リアルタイム復元が困難 7
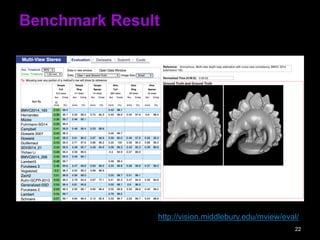
- 8. Multi-View Stereo Algorithm サーベイ ?? A Comparison and Evaluation of Multi-View Stereo Reconstruction Algorithm –? CVPR 2006 –? Authors : ?? Steven M. Seitz ?? Brain Curless ?? James Diebel ?? Daniel Scharstein ?? Richard Szeliski ?? 各種アルゴリズムの分類 ?? 復元性能のベンチマーク?ランキング 8
- 9. Multi-View Stereo taxonomy ?? Scene representation ?? Photo-consistency measure ?? Visibility model ?? Shape prior ?? Reconstruction algorithm ?? Initialization requirements 9
- 10. Scene representation ?? 取り扱う3次元空間の表現方法 –?Volume –?Polygon Mesh –?Set of depth maps 10
- 11. Scene representation ?? Volume –?3次元空間をGrid状に分割した空間 ?? Voxel ?? Level-Set Voxel ?? 各Gridにオブジェクトの占有率(二値)を格納 Level-Set ?? 各Gridに、最も近い面までの距離を格納 11
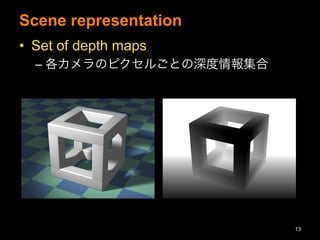
- 12. Scene representation ?? Polygon Mesh –?頂点とそれを繋ぐ面のセット 12
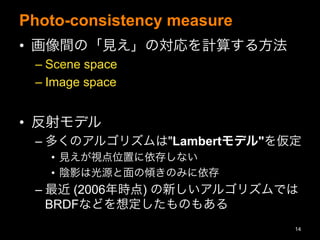
- 13. Scene representation ?? Set of depth maps –?各カメラのピクセルごとの深度情報集合 13
- 14. Photo-consistency measure ?? 画像間の「見え」の対応を計算する方法 –?Scene space –?Image space ?? 反射モデル –?多くのアルゴリズムは"Lambertモデル"を仮定 ?? 見えが視点位置に依存しない ?? 陰影は光源と面の傾きのみに依存 –?最近 (2006年時点) の新しいアルゴリズムでは BRDFなどを想定したものもある 14
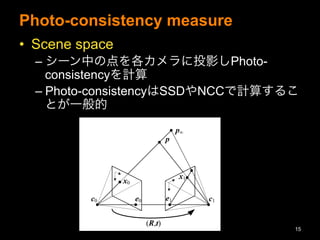
- 15. Photo-consistency measure ?? Scene space –?シーン中の点を各カメラに投影しPhoto- consistencyを計算 –?Photo-consistencyはSSDやNCCで計算するこ とが一般的 15 538 Computer Vision: Algorithms and Applications (Septemb p x1 x0 (R,t) p∞ e1e0c0 c1 epipolar plane p (R,t) c0 epipolar lines x 0 e0 e1 l0
- 16. Photo-consistency measure ?? Image space –?カメラ画像をシーンに投影してPhoto- consistencyを計算 16 11.1 Epipolar geometry 541 Virtual camera d x y Input image k u v Homography: u = H x x y k d k (a) (b)
- 17. Visibility model ?? 各カメラでの可視?不可視の判断方法 –? オクルージョンの問題 ?? Geometric –? 真面目に取り組むアプローチ –? 基本的にチキン?エッグ問題なので、カメラ配置に制約を 持たせるなどで対応 ?? Quasi-geometric –? 近似情報を使うアプローチ –? Visual Hullなどで粗い復元をしてからPhoto-Consistencyを 計算 ?? Outlier-based –? 外れ値を無視するアプローチ –? "複数の画像からのphoto-consistency"で説明されているア プローチもこれに該当 17
- 18. Shape prior ?? 形状に対する事前知識モデル –? Photo-consistencyだけでは失敗する –? 特にTextureのない領域 ?? Minimal Surface –? 面は滑らかである –? 曲率の高い部分は苦手 –? Level-set, mesh-based algorithm ?? Maximal Surface –? 空間を削る系のアプローチ –? 輝度が一致する解が見つかればその場で停止 –? 高い曲率も表現できる –? 全体的に復元結果が大きくなる傾向になる –? Voxel-coloring, Space carving ?? Image-based –? 近傍PixelのDepthはSmooth –? 2D Markov Random Field 18
- 19. Reconstruction algorithm ?? 3D Volume –? Volumeの各格子でコスト関数を計算 –? その後、Surfaceを抽出 –? Voxel-coloring, Volumetric MRF ?? Evolving surface –? 徐々に面を形成してくアプローチ –? Level-set, Space carving ?? Depth map –? 複数のDepth mapを独立に計算し、統合 ?? Feature Point –? 疎な再構成を行ってから、それらを補間 19
- 20. Initialization requirements ?? 初期化の要件 –?Rough Bounding Box or Volume ?? Space carving ?? Level-set (質の高い初期値が必要) –?Foreground/background segmentation ?? silhouette –?Range of disparity or depth values ?? Image-space algorithm 20
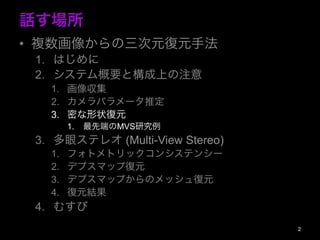
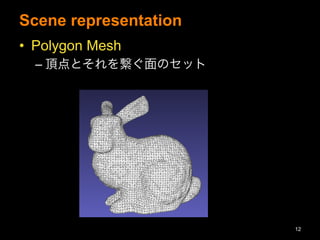
- 21. Benchmark Datasets 21 bird dogs lti-view datasets with laser-scanned 3D models. 317 camera positions and orientations for the temple gaps are due to shadows. The 47 cameras correspond- g dataset are shown in blue and red, and the 16 sparse only in red. at serves as an initial estimate of scene geom- 31,47,48]. tion of 640 × 480 pixels att arm. At this resolution, a pix 0.25mm on the surface of th 10cm × 16cm × 8cm, and th The system was calibrated tion grid from 68 viewpoints [61] to compute intrinsic an these parameters, we compu and rotational offset relative t abling us to determine the cam as a function of any desired a The target object sits on center of the gantry sphere an lights. Because the gantry c certain viewpoints, we double two different arm con?gurat images. After shadowed im we obtained roughly 80% cov resulting images, we created corresponding to a full hemis temple temple model temple dino カメラ配置??47視点 カメラ解像度?640x480 Temple 10x16x8 cm Dino 7x9x7 cm
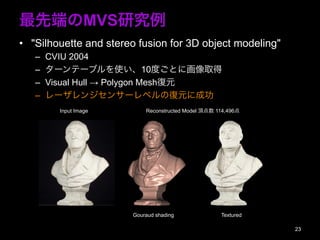
- 23. 最先端のMVS研究例 ?? "Silhouette and stereo fusion for 3D object modeling" –? CVIU 2004 –? ターンテーブルを使い、10度ごとに画像取得 –? Visual Hull → Polygon Mesh復元 –? レーザレンジセンサーレベルの復元に成功 23 Input Image Reconstructed Model 頂点数 114,496点 Gouraud shading Textured
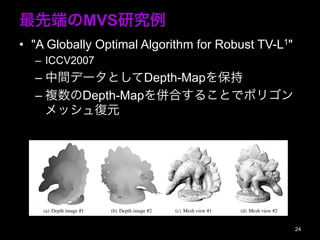
- 24. 最先端のMVS研究例 ?? "A Globally Optimal Algorithm for Robust TV-L1" –? ICCV2007 –?中間データとしてDepth-Mapを保持 –?複数のDepth-Mapを併合することでポリゴン メッシュ復元 24 (a) Depth image #1 (b) Depth image #2 (c) Mesh view #1 (d) Mesh view #2 Figure 3. Selected depth images and the ?nal mesh (379958 triangles) for the “Dino” dataset.
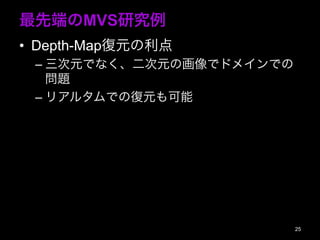
- 26. 最先端のMVS研究例 ?? "Towards Internet-scale Multi-view Stereo " –? CVPR 2010 –? 法線付きの点群として3次元復元 –? 大規模MVS 26 cale Multi-view Stereo Steven M. Seitz1,2 Richard Szeliski3 Washington 3 Microsoft Research Figure 1. Our dense reconstruction of Piazza San Marco (Venice) Pizza San Marco (Venice) 視点数 : 13,703 点群数 : 27,707,825
- 27. 最先端のMVS研究例 ?? 大規模MVSのChallenge –?ビュークラスタリング問題 ?? SfMの出力からMVSに必要な視点をクラスタリング –?PCクラスタで並列化 ?? とはいえ、数時間はかかる 27
- 28. 公開されている無償ソフトウェア Structure from Motion (SfM) –? Bundler ?? Photo Tourismはこれを使ってる –? Voodoo Camera Tracker ?? 動画からのSfM Multi-View Stereo (MVS) –? Patch-based Multi-view Stereo (PMVS) –? Poisson Surface Reconstruction ?? 法線付き点群からのMesh生成 Web Service –? My3DScanner (サービス終了???) ?? Bundler + PMVS + Poisson Surface Reconstruction –? Photosynth –? Automatic Reconstruction Conduit Viewer –? MeshLab 28