Maze Solver Robot Poster
Download as PPTX, PDF3 likes1,565 views

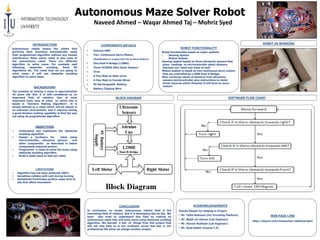
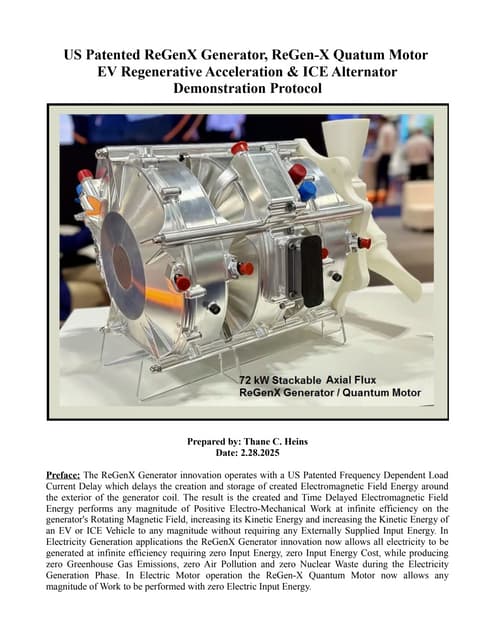
The document describes an autonomous maze solving robot project. The robot uses three ultrasonic sensors to detect the maze walls and two servo motors controlled by a microcontroller to navigate. The microcontroller receives distance readings from the sensors and instructs the motor driver which direction to move the motors to avoid obstacles as it solves the maze. Components include an Arduino, ultrasonic sensors, servo motors, batteries and other basic electronics. The robot is programmed to use an obstacle avoidance algorithm to autonomously solve mazes without human interference.


























More Related Content
What's hot (20)
Similar to Maze Solver Robot Poster (20)


















Recently uploaded (20)















Maze Solver Robot Poster
- 1. Naveed Ahmed – Waqar Ahmed Taj – Mohriz Syed Autonomous Maze Solver Robot ROBOT FUNCTIONALITY Robot functionality based on major systems • Sensing System • Motion System Sensing system based on three ultrasonic sensors that gives readings to microcontroller about distance between our robot and maze of wall. Motion system is based on two continuous servo motors that are controlled by L298N Dual H-Bridge. After receiving values of distance from ultrasonic sensors microcontroller give instructions to motor driver towards which direction it will have to move motors. COMPONENTS DETAILS  Arduino UNO  Two Continuous Servo Motors (Modification in project from DC to Servo Motors)  One Dual H-Bridge (L298D)  Three HCSR04 Ultra Sonic Sensors  Tires  A Few Male to Male wires  A Few Male to Female Wires  9V Rechargeable Battery  Battery Clipping Wire INTRODUCTION Autonomous robots means the robots that performs their functions automatically using their programmed algorithm without any human interference. Maze solver robot is also ones of the autonomous robot. There are different algorithm to solve maze. For example wall following, obstacles avoiding, flood fill algorithms etc. The robot that we are going to solve maze, it will use obstacles avoiding algorithm to solve maze. BACKGROUND The problem of solving a maze is approximately 45 years old. But, it is still considered as an important field of robotics. One of most important basic area of robot on which this is based is “Decision Making Algorithm". It is simply defined as a robot which will be placed in an unknown environment, and it requires having a good decision making capability to find the way out using its programmed algorithm. OBJECTIVES  Understand and implement the obstacles avoiding algorithm.  Design a hardware for robot using microcontroller, ultrasonic sensors and other components as described in below components required portion.  Programme a robot to solve the maze using obstacles avoiding algorithm.  Build a small maze to test our robot. LIMITATIONS  Algorithm has not been achieved 100%.  Sometime collides with wall during turning.  Sometimes frictionless surface cause tires to slip that affect movement. CONCLUSION In conclusion, no doubt, autonomous robotic field is the interesting field of robotics. And it is developing day by day. We have also tried to understand this field by making an autonomous robot that will solve maze using obstacles avoiding algorithm. We learned a lots of things from this project that will not only help us in our academic career but also in our professional life when we design another project. ACKNOWLEDGEMENTS Thanks People For Helping in Project  Mr. Talha Rehmani (For Providing Platform)  Mr. Wajih-Uz-Zaman (Lab Engineer)  Mr. Haroon Rasheed (Lab Engineer)  Mr. Syed Hashir (Course T.A) WEB PAGE LINK http://tinyurl.com/mazesolver-roboticproject SOFTWARE FLOW CHARTBLOCK DIAGRAM ROBOT IN WORKING