


![Õnî}ÔOķĻ
1ĨĻĨÔĨ―Đ`ĨÉĢšŨßÐÐé_ĘžĪŦĪé
ĨģĐ`ĨđĨĒĨĶĨČĄĒÐnÍŧĄĒ90Ãë―Uß^ĪÞĪĮ
ÔuýÖļË
ĒŲĨģĐ`ĨđÄÚĪĮ°ēČŦĪĘŨßÐÐ
1ĨĻĨÔĨ―Đ`ĨÉĪÎŨßÐÐūāëx
ĒÚŋÉÄÜĪĘÏÞĪęËŲĪĪŨßÐÐ
1ĨĻĨÔĨ―Đ`ĨÉĪÎÆ―ūųËŲķČ
ĒÛ―ŧēîĩãĪĮĪÎĨëĐ`ĨČßxk
―ŧēîĩãĪÎĨëĐ`ĨČßxkÕý―âÂĘ
ĄðČëÁĶ
ËŲķČ(0~1.5)[m/s]
žÓËŲķČ(-0.5~1.0)[m/?2
]
―ĮËŲķČ(-2.6~2.6)[rad/s]
―ĮžÓËŲķČ(-1.3~1.3)[rad/?2
]
ß^ČĨ3ĨđĨÆĨÃĨŨĪÎĨđĨÆĨĒĨęĨóĨ°
ß^ČĨ3ĨđĨÆĨÃĨŨĪÎĨĒĨŊĨŧĨë
·―ÏōĪČÄŋËĨëĐ`ĨČĪČĪÎÕ`ēî(-ĶÐ~ĶÐ)[rad]
ĨģĐ`ĨđĘÖŠÓÃĨéĨĪĨĀĐ`(0~4)[m]
ËûRCĨŦĐ`ĘÖŠÓÃĨéĨĪĨĀĐ`(0~4)[m]
ĄðģöÁĶ
ÄÚČÝ ĨđĨÆĨĒĨęĨóĨ° ĨĒĨŊĨŧĨë
Ũó(īó) Ũó30ķČ ON
Ũó(ÖÐ) Ũó22.5ķČ ON
Ũó(ÐĄ) Ũó7.5ķČ ON
ÖąßM 0ķČ ON
ÓŌ(ÐĄ) ÓŌ7.5ķČ ON
ÓŌ(ÖÐ) ÓŌ22.5ķČ ON
ÓŌ(īó) ÓŌ30ķČ ON
ÍĢÖđ 0ķČ OFF
RCĨŦĐ`ÖÐÐÄĪŦĪé°kĪđĪëĨéĨĪĨĀĐ`
ĨģĐ`Ĩđūģ―įĘÖŠÓÃ(Įāĩã)
ËûRCĨŦĐ`ÕJŨRÓÃ(ūvĩã)
ÍâēŋĪŦĪéĪÎÖÆÓųÃüÁî
RCĨŦĐ`ĪÎßM·ĪōQķĻĪđĪë
RCĨŦĐ`Īη―ÏōĪČ
ÄŋËĨëĐ`ĨČĪČĪÎÕ`ēî
ĶČ
ČëģöÁĶĪÎÄÚČÝĪōQķĻĪ·ĄĒRCĨŦĐ`ĪÎß\ÜÖÆÓųĪÎÔuý·―·ĻĪōQķĻĪđĪë
5](https://image.slidesharecdn.com/ogawa-170213001258/85/ogawa_b-5-320.jpg)

![Deep Q-Network
ĘđÓÃĨŅĨéĨáĐ`Ĩŋ
ĨÉĨíĨÃĨŨĨĒĨĶĨČÂĘ0.5
ŧîÐÔŧŊévĘý Relu
ŨîßmŧŊ·―Ę― RMSProp
Learning Rate 0.000025
Gradient momentum ĶĖ 0.95
Target Network 3Į§ŧØĪĮļüÐÂ
QŅ§ÁĪËDeep LearningĪō―MĪßšÏĪïĪŧĪŋĪâĪÎ
QĨÆĐ`ĨÖĨëĪōNNĪĮÖÃĪQĪĻĪëĪģĪČĪËĪčĪÃĪÆķāĪŊĪÎŨīrĪËęĪđĪë
ÐÐÓQķĻ ĶÅ-greedy ĶÅ=0.1
ģõÆÚŧŊ ĨŠĐ`ĨČĨĻĨóĨģĐ`ĨĀ
ļũÓ200ŧØŅ§Á
ÖÐ
ég
Ó
Ģī
(
Ģē
Ģ°
Ģ°
)ËŲķČ
žÓËŲķČ
―ĮËŲķČ
―ĮžÓËŲķČ
ß^ČĨĪÎĨđĨÆĨĒĨęĨóĨ°(3)
ÄŋË·―Ïō
ĨģĐ`ĨđÓÃĨéĨĪĨĀĐ`(56)
ËûRCĨŦĐ`ÓÃĨéĨĪĨĀĐ`(56)
ß^ČĨĪÎĨĒĨŊĨŧĨë(3)
ČëÁĶ
ÖÐ
ég
Ó
Ģą
(
Ģĩ
Ģ°
Ģ°
)
ÖÐ
ég
Ó
Ģē
(
Ģī
Ģ°
Ģ°
)
ÖÐ
ég
Ó
Ģģ
(
Ģģ
Ģ°
Ģ°
)
NNģÉí
ÖÐ
ég
Ó
Ģĩ
(
Ģ·
Ģ°
)
ģöÁĶ
Ũó(īó)
Ũó(ÖÐ)
Ũó(ÐĄ)
ÖąßM
ÓŌ(ÐĄ)
ÓŌ(ÖÐ)
ÓŌ(īó)
ÍĢÖđ
?????? ? ????? ???????? Q?(s,a) = max
?
? ?? + ???+1 + ?2
??+2 + ? ?? = ?, ? ? = ?, ?
???? ???????? ?? ?? = ? ?,?,?,?Ąä ~?(?)[(? + ? max
?Ąä
? ?Ąä
, ?Ąä
; ??
?
? ?(?, ?; ??))2
]
ĶČ:Q-network paramater
Volodymyr Mnih, Koray Kavukcuoglu, David Silver,at el,
Ą°Human-level control through deep reinforcement learningĄą Nature, 14236, pp.529--533
7](https://image.slidesharecdn.com/ogawa-170213001258/85/ogawa_b-7-320.jpg)
![óģęÔOķĻ
ÖØĪßļķĪóģęšÍĪōŅ§ÁĪËÓÃĪĪĪë
Rsum =
R ?????? ??? (ĨģĐ`ĨđĨĒĨĶĨČ)
R ??? ????????? (RCĨŦĐ`ÍŽĘŋĪÎÐnÍŧ)
? ????? ? ????? + ?????? ?????? + ??????? ??????? + ? ????? ? ????? (?????????)
ĒŲĨģĐ`ĨđÄÚĪĮ°ēČŦĪĘŨßÐÐ
? ĨģĐ`ĨđĨĒĨĶĨČĪÎŧØąÜ
? ËûĪÎRCĨŦĐ`ĪČĪÎÐnÍŧĪÎŧØąÜ
? ÉßÐÐß\ÜĪÎŧØąÜ
? ĨģĐ`ĨđÖÐŅëĪĮŨßÐÐ
R ?????= 1/9 ĄÁ 9 min (???/)????????,???maxL
?????? ????? = ÖąĮ°2ĨđĨÆĨÃĨŨĪÎĨÏĨóĨÉĨëäļüŧØĘý
R?????? = m?? ?????? ?????, 2
maxL[m]
16?2 + ?2 = 1
16?2
9
+ ?2
= 1
maxL0=0.25
maxL1=0.267
maxL2=0.343
maxL3=0.609
maxL4=1
maxL5=1.276
maxL6=0.849
maxL7=0.731
maxL8=0.75
22.5ķČ
ĒÚŋÉÄÜĪĘÏÞĪęËŲĪĪŨßÐÐ
? ÍĢÖđĪÎŧØąÜ
R ????? = v
m
s
ĒÛ―ŧēîĩãĪĮĪÎĨëĐ`ĨČßxk
? ÄŋËĨëĐ`ĨČĪËÐýŧØ
ĶČ
Rorder =
(1 ?
|?|
20
ĄÁ
1
15
) (|?| < 20Ąã)
14
15
(1 ?
|?| ? 20
160
) (|?| ĄÝ 20Ąã)
ĨëĐ`ĨČßxk
8
R ?????? ???
R ??? ?????????](https://image.slidesharecdn.com/ogawa-170213001258/85/ogawa_b-8-320.jpg)

![0
0.5
1
1.5
2
2.5
3
3.5
4
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0 5 10 15 20 25 30
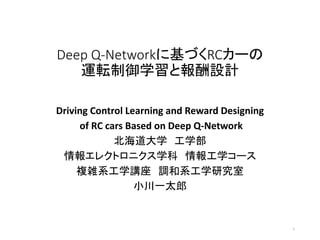
ËŲķČ[m/s]ŨßÐÐūāëx[m]
ĨëĐ`ĨČßxkÕý―âÂĘÓčägōY ―Yđû
A order R course out A speed A lidarĶÃ
ßM·Ũ·ūÂĘĪōÖØŌ ŨßÐÐūāëxĪōÖØŌ
ņÓÃËŪĘĪōÓÃĪĪĪŋóģęšÍĪŽQķĻĪ·Īŋ
Rsum =
?100 (ĨģĐ`ĨđĨĒĨĶĨČ)
?200 (RCĨŦĐ`ÍŽĘŋĪÎÐnÍŧ)
50? ????? ? 70?????? ?3??????? +150? ????? (?????????)
10
ĪđĪŲĪÆĪÎÖļËĪĮ
Ũîßm
ŨßÐÐūāëx
ßM·Ũ·ūÂĘ
ĪōÖØŌ
ŨßÐÐūāëx
ßM·Ũ·ūÂĘ
ĪōÖØŌ](https://image.slidesharecdn.com/ogawa-170213001258/85/ogawa_b-10-320.jpg)

![0
1
2
3
4
5
6
7
ŨßÐÐūāëx[m]
0
0.2
0.4
0.6
0.8
1
ĨëĐ`ĨČßxkÕý―âÂĘŅ§ÁgōY
?
gCŨßÐÐĪĮĪÏĪđĪŲĪÆĪÎÖļËĪĮÏō
ÉÏĪŽŌĪéĪėĄĒÕýĪ·ĪŊŅ§ÁĪŽßMĪóĪĮĪĪ
ĪëĄĢĨ°ĨéĨÕĪĮĪÏÉėĪÓīúĪŽŌĪéĪėĪëĄĢ
?ÍĢÖđÜŨ·žÓááĪÎŨßÐÐūāëxĪÏpÉŲ
Ī·ĪÆĪĪĪëĪģĪČĪŽÕiĪßČĄĪėĪëĄĢ
?ķþCŨßÐÐĪĮĪÏČŦĪÆĪÎÖļËĪŽpÉŲ
Ī·ĪÆĪĪĪë
ĒÕh
ŨßÐÐūāëxĪčĪęĪâĨëĐ`ĨČßxkÕý―âÂĘ
ÏČĪđĪëß\ÜÖÆÓųĪŽÐÐĪïĪėĪÆĪĪĪë
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
0 1000000 2000000 3000000 4000000 5000000
ËŲĪĩ[m/s]
Ņ§ÁŧØĘý
―üËÆĮúūĪÏĀÛ\―üËÆĪōņÓÃĪ·Īŋ
gCŨßÐÐ ÍĢÖđÜ ķþCŨßÐÐ
gōY
ĨģĐ`Ĩđ
12](https://image.slidesharecdn.com/ogawa-170213001258/85/ogawa_b-12-320.jpg)
































More Related Content
Similar to ogawa_b (20)
More from harmonylab (20)


















Recently uploaded (9)









ogawa_b
- 1. Deep Q-NetworkĪËŧųĪÅĪŊRCĨŦĐ`ĪÎ ß\ÜÖÆÓųŅ§ÁĪČóģęÔOÓ Driving Control Learning and Reward Designing of RC cars Based on Deep Q-Network ąąšĢĩĀīóŅ§ đĪŅ§ēŋ ĮéóĨĻĨėĨŊĨČĨíĨËĨŊĨđŅ§ŋÆ ĮéóđĪŅ§ĨģĐ`Ĩđ Ņ}ëjÏĩđĪŅ§ÖvŨų Õ{šÍÏĩđĪŅ§ŅÐūŋĘŌ ÐĄīĻŌŧĖŦĀÉ 1
- 2. ŅÐūŋąģū° Deep Q-Network(1 Deep LearningĪōQŅ§ÁĪËßmÓÃĪ·ĪŋĪâĪÎ ? ÏČÐÐŅÐūŋ Preferred NetworksĄą Autonomous robot car control demonstration in CES2016Ąą(2 ? Ņ}ĘýĨíĨÜĨÃĨČĪÎŅ§Á ? Ņ}ëjĪĘhūģĪÎŅ§Á 1)Volodymyr Mnih, Koray Kavukcuoglu, David Silver,at el, Ą°Human-level control through deep reinforcement learningĄą Nature, 14236, pp.529ĄŠ533 2)Preferred Reserch Ą°CES2016ĪĮĨíĨÜĨÃĨČĨŦĐ`ĪÎĨĮĨâĪōÕđĘūĪ·ĪÆĪĪÞĪ·ĪŋĄą https://research.preferred.jp/2016/01/ces2016/ Ņ}ĘýĪÎRCĨŦĐ`ĪŽÐnÍŧĪ·ĪĘĪĪĪĮŨßÐÐ ÖļķĻĨëĐ`ĨČĪÎŨßÐÐ 2
- 3. Deep Q-NetworkĪÎęÓÃŋÉÄÜÐÔ ?Ņ}ëjĪĘhūģĪōŅ§ÁĪĮĪĪë ?Ņ}ĘýĪÎĨíĨÜĨÃĨČĪÎÓŨũĪËĪÄĪĪĪÆŅ§ÁĪĮĪĪë ęÓÃŋÉÄÜÐÔĪō ĢĪĩĪéĪËŅ}ëjĪĘhūģ ? ÍâēŋĪŦĪéĪÎÃüÁî ĢÍŽrĪËŅ}ĘýĪÎî}ĪËIĪđĪëąØŌŠĪŽĪĒĪë ? ļßËŲĪĘÓŨũĪōÐÐĪĶĨíĨÜĨÃĨČ ĢŌâËžQķĻĪËrégĪŽĪŦĪąĪëĪģĪČĪŽĪĮĪĪĘĪĪ Ģŧß_ĘÖķÎĪŽąØŌŠĪËĪĘĪë ĒŲĨģĐ`ĨđÄÚĪĮ°ēČŦĪĘŨßÐÐ ĒÚŋÉÄÜĪĘÏÞĪęËŲĪĪŨßÐÐ ĒÛ―ŧēîĩãĪĮĪÎĨëĐ`ĨČßxk RCĨŦĐ`ĪÎß\ÜÖÆÓų ąūŅÐūŋĪĮČĄĪęÉÏĪēĪë 3
- 4. ghūģĨ·ĨđĨÆĨā ŨßÐÐĨģĐ`Ĩđ ĘŊļāĨÜĐ`ĨÉ 5. 88 ĄÁ 7.84?2 ĘđÓÃĨŦĨáĨé Baumer VLG24 ĨģĐ`ĨđĪÎ―ĮÉÏĪËķþĪÄĪÎĨŦĨáĨéĪōÅäÖà ÖÆÓųÓÃPC Alienware ĒÏëĩÄĨģĐ`Ĩđ ―ŧēîĩãĪÎČëQŋÉ OpenCV ŧÏņäQ ÉŦîIÓō ģéģö ÉäÓ°äQ CĖå·ŽšÅ,ÎŧÖÃ,·―Ïō ūv,ŧÆĪÎ―MĪßšÏĪïĪŧ 8cm,8cm,6.5cmĪÎ Čý―ĮÐÎ ÎŧÖÃÍÆķĻ ĨŅĐ`ĨÆĨĢĨŊĨëĨÕĨĢĨëĨŋ ÎŧÖÃ,·―ÏōĪōÍÆķĻ ÁĢŨÓĘý2000 ÁĢŨÓÖØĪßļķĪąĢš dx,xŨųËĪÎÓQyĪČĪÎēî dy,yŨųËĪÎÓQyĪČĪÎēî dd,·―ÏōĪÎÓQyĪČĪÎēî ß\ÜÖÆÓų 1/10RCĨŦĐ` Raspberrypi3 ŧųąPĪÎŨũģÉ PWMĪĮĨâĐ`ĨŋĐ`ÖÆÓų žs6.67fpsĪĮÓŨũ w i = exp(? 1 1600 ??2 ? 1 1600 ??2 ? 25 4 ??2 ) ĨŦĨáĨé1īéÓ°đ ė ĨŦĨáĨé2īéÓ°đ ė ĨŦĨáĨé2ÎŧÖà 4
- 5. Õnî}ÔOķĻ 1ĨĻĨÔĨ―Đ`ĨÉĢšŨßÐÐé_ĘžĪŦĪé ĨģĐ`ĨđĨĒĨĶĨČĄĒÐnÍŧĄĒ90Ãë―Uß^ĪÞĪĮ ÔuýÖļË ĒŲĨģĐ`ĨđÄÚĪĮ°ēČŦĪĘŨßÐÐ 1ĨĻĨÔĨ―Đ`ĨÉĪÎŨßÐÐūāëx ĒÚŋÉÄÜĪĘÏÞĪęËŲĪĪŨßÐÐ 1ĨĻĨÔĨ―Đ`ĨÉĪÎÆ―ūųËŲķČ ĒÛ―ŧēîĩãĪĮĪÎĨëĐ`ĨČßxk ―ŧēîĩãĪÎĨëĐ`ĨČßxkÕý―âÂĘ ĄðČëÁĶ ËŲķČ(0~1.5)[m/s] žÓËŲķČ(-0.5~1.0)[m/?2 ] ―ĮËŲķČ(-2.6~2.6)[rad/s] ―ĮžÓËŲķČ(-1.3~1.3)[rad/?2 ] ß^ČĨ3ĨđĨÆĨÃĨŨĪÎĨđĨÆĨĒĨęĨóĨ° ß^ČĨ3ĨđĨÆĨÃĨŨĪÎĨĒĨŊĨŧĨë ·―ÏōĪČÄŋËĨëĐ`ĨČĪČĪÎÕ`ēî(-ĶÐ~ĶÐ)[rad] ĨģĐ`ĨđĘÖŠÓÃĨéĨĪĨĀĐ`(0~4)[m] ËûRCĨŦĐ`ĘÖŠÓÃĨéĨĪĨĀĐ`(0~4)[m] ĄðģöÁĶ ÄÚČÝ ĨđĨÆĨĒĨęĨóĨ° ĨĒĨŊĨŧĨë Ũó(īó) Ũó30ķČ ON Ũó(ÖÐ) Ũó22.5ķČ ON Ũó(ÐĄ) Ũó7.5ķČ ON ÖąßM 0ķČ ON ÓŌ(ÐĄ) ÓŌ7.5ķČ ON ÓŌ(ÖÐ) ÓŌ22.5ķČ ON ÓŌ(īó) ÓŌ30ķČ ON ÍĢÖđ 0ķČ OFF RCĨŦĐ`ÖÐÐÄĪŦĪé°kĪđĪëĨéĨĪĨĀĐ` ĨģĐ`Ĩđūģ―įĘÖŠÓÃ(Įāĩã) ËûRCĨŦĐ`ÕJŨRÓÃ(ūvĩã) ÍâēŋĪŦĪéĪÎÖÆÓųÃüÁî RCĨŦĐ`ĪÎßM·ĪōQķĻĪđĪë RCĨŦĐ`Īη―ÏōĪČ ÄŋËĨëĐ`ĨČĪČĪÎÕ`ēî ĶČ ČëģöÁĶĪÎÄÚČÝĪōQķĻĪ·ĄĒRCĨŦĐ`ĪÎß\ÜÖÆÓųĪÎÔuý·―·ĻĪōQķĻĪđĪë 5
- 6. Ņ§ÁĨ·ĨđĨÆĨā ghūģĨ·ĨđĨÆĨā ÐÐÁÐÓËãĨéĨĪĨÖĨéĨę(TensorFlow) Deep Q-NetworkĪÎgŨ° 1ĨĻĨÝĨÃĨŊ=1Į§ĨĻĨÔĨ―Đ`ĨÉ ĨÜĨëĨÄĨÞĨó·ÖēžĪËūĪĪĄĒ ĨĻĨÔĨ―Đ`ĨÉĪōßxk ·ÖÉĒĨÕĨĄĨĪĨëĨ·ĨđĨÆĨā(NFS) ĨËĨåĐ`ĨéĨëĨÍĨÃĨČ(NN)ĪÎ ĨâĨĮĨëĪÎąĢīæ gCĪōÓÃĪĪĪŋŅ§ÁĪĮĪÏĨĻĨÔĨ―Đ`ĨÉĪÎ §žŊĪČŅ§ÁĪō―ŧŧĨĪËÐÐĪĶĪČrégĪŽĪŦĪŦĪë eĄĐĪÎĨģĨóĨÔĨåĐ`ĨŋĪĮĨĻĨÔĨ―Đ`ĨÉĪÎ §žŊĪČŅ§ÁĪō·ÖëxĪ·ĄĒÍŽrĪËÐÐĪĶ Ņ§ÁĨ·ĨđĨÆĨā ĨĻĨÔĨ―Đ`ĨÉĪÎ ąĢīæ ĨĮĨđĨŊĨČĨÃĨŨPC RC R-XG GPUĄÁ4 Edition ĨĮĐ`ĨŋĨŲĐ`Ĩđ(MySQL,MySQL workbench) ÓÃĪÎĨÆĐ`ĨÖĨëĪōŨũģÉ ĨĻĨÔĨ―Đ`ĨÉÄÚČÝ,ĨĻĨÔĨ―Đ`ĨÉĪÎŨßÐÐrég,ID,gōY·ŽšÅ ĨĻĨÔĨ―Đ`ĨÉÄÚČÝ ĨđĨÆĨĒĨęĨóĨ°ģöÁĶ,ĨĒĨŊĨŧĨëģöÁĶ,Óčä,Óčä,ĨģĐ`ĨđĨĒĨĶĨČĪÞĪŋĪÏÐnÍŧ,―ŧ ēîĩãĪĮĪÎÄŋË·―Ïō,―ŧēîĩãĪÎĨëĐ`ĨČßxk,ČëÁĶ MySQL workbenchĪËĪčĪëąíĘū NNĪÎĨâĨĮĨëĪÎļüР6 ÍÆÕĪō ÐÐĪĶ
- 7. Deep Q-Network ĘđÓÃĨŅĨéĨáĐ`Ĩŋ ĨÉĨíĨÃĨŨĨĒĨĶĨČÂĘ0.5 ŧîÐÔŧŊévĘý Relu ŨîßmŧŊ·―Ę― RMSProp Learning Rate 0.000025 Gradient momentum ĶĖ 0.95 Target Network 3Į§ŧØĪĮļüРQŅ§ÁĪËDeep LearningĪō―MĪßšÏĪïĪŧĪŋĪâĪÎ QĨÆĐ`ĨÖĨëĪōNNĪĮÖÃĪQĪĻĪëĪģĪČĪËĪčĪÃĪÆķāĪŊĪÎŨīrĪËęĪđĪë ÐÐÓQķĻ ĶÅ-greedy ĶÅ=0.1 ģõÆÚŧŊ ĨŠĐ`ĨČĨĻĨóĨģĐ`ĨĀ ļũÓ200ŧØŅ§Á ÖÐ ég Ó Ģī ( Ģē Ģ° Ģ° )ËŲķČ žÓËŲķČ ―ĮËŲķČ ―ĮžÓËŲķČ ß^ČĨĪÎĨđĨÆĨĒĨęĨóĨ°(3) ÄŋË·―Ïō ĨģĐ`ĨđÓÃĨéĨĪĨĀĐ`(56) ËûRCĨŦĐ`ÓÃĨéĨĪĨĀĐ`(56) ß^ČĨĪÎĨĒĨŊĨŧĨë(3) ČëÁĶ ÖÐ ég Ó Ģą ( Ģĩ Ģ° Ģ° ) ÖÐ ég Ó Ģē ( Ģī Ģ° Ģ° ) ÖÐ ég Ó Ģģ ( Ģģ Ģ° Ģ° ) NNģÉí ÖÐ ég Ó Ģĩ ( Ģ· Ģ° ) ģöÁĶ Ũó(īó) Ũó(ÖÐ) Ũó(ÐĄ) ÖąßM ÓŌ(ÐĄ) ÓŌ(ÖÐ) ÓŌ(īó) ÍĢÖđ ?????? ? ????? ???????? Q?(s,a) = max ? ? ?? + ???+1 + ?2 ??+2 + ? ?? = ?, ? ? = ?, ? ???? ???????? ?? ?? = ? ?,?,?,?Ąä ~?(?)[(? + ? max ?Ąä ? ?Ąä , ?Ąä ; ?? ? ? ?(?, ?; ??))2 ] ĶČ:Q-network paramater Volodymyr Mnih, Koray Kavukcuoglu, David Silver,at el, Ą°Human-level control through deep reinforcement learningĄą Nature, 14236, pp.529--533 7
- 8. óģęÔOķĻ ÖØĪßļķĪóģęšÍĪōŅ§ÁĪËÓÃĪĪĪë Rsum = R ?????? ??? (ĨģĐ`ĨđĨĒĨĶĨČ) R ??? ????????? (RCĨŦĐ`ÍŽĘŋĪÎÐnÍŧ) ? ????? ? ????? + ?????? ?????? + ??????? ??????? + ? ????? ? ????? (?????????) ĒŲĨģĐ`ĨđÄÚĪĮ°ēČŦĪĘŨßÐÐ ? ĨģĐ`ĨđĨĒĨĶĨČĪÎŧØąÜ ? ËûĪÎRCĨŦĐ`ĪČĪÎÐnÍŧĪÎŧØąÜ ? ÉßÐÐß\ÜĪÎŧØąÜ ? ĨģĐ`ĨđÖÐŅëĪĮŨßÐÐ R ?????= 1/9 ĄÁ 9 min (???/)????????,???maxL ?????? ????? = ÖąĮ°2ĨđĨÆĨÃĨŨĪÎĨÏĨóĨÉĨëäļüŧØĘý R?????? = m?? ?????? ?????, 2 maxL[m] 16?2 + ?2 = 1 16?2 9 + ?2 = 1 maxL0=0.25 maxL1=0.267 maxL2=0.343 maxL3=0.609 maxL4=1 maxL5=1.276 maxL6=0.849 maxL7=0.731 maxL8=0.75 22.5ķČ ĒÚŋÉÄÜĪĘÏÞĪęËŲĪĪŨßÐÐ ? ÍĢÖđĪÎŧØąÜ R ????? = v m s ĒÛ―ŧēîĩãĪĮĪÎĨëĐ`ĨČßxk ? ÄŋËĨëĐ`ĨČĪËÐýŧØ ĶČ Rorder = (1 ? |?| 20 ĄÁ 1 15 ) (|?| < 20Ąã) 14 15 (1 ? |?| ? 20 160 ) (|?| ĄÝ 20Ąã) ĨëĐ`ĨČßxk 8 R ?????? ??? R ??? ?????????
- 9. ÓčägōY óģęĨŅĨéĨáĐ`ĨŋĪÎĖ―Ëũ ŌŠŌō ËŪĘ 1 2 3 4 ĶĢ ļîŌýÂĘ 0.8 0.85 0.9 0.99 ? ????? 50 80 100 150 R ?????? ??? -1 -20 -50 -100 ? ????? 30 50 60 80 ?????? 0 -30 -50 -70 ÓčägōYĨģĐ`Ĩđ gōY Ķà ? ????? ?course out ? ????? ?????? 1 0.8 50 -1 30 0 2 0.8 80 -20 50 -30 3 0.8 100 -50 60 -50 4 0.8 150 -100 80 -70 5 0.85 50 -20 60 -70 6 0.85 80 -1 80 -50 7 0.85 100 -100 30 -30 8 0.85 150 -50 50 0 9 0.9 50 -50 80 -30 10 0.9 80 -100 60 0 11 0.9 100 -1 50 -70 12 0.9 150 -20 30 -50 13 0.99 50 -100 50 -50 14 0.99 80 -50 30 -70 15 0.99 100 -20 80 0 16 0.99 150 -1 60 -30 L16Öą―ŧąíĪĮĨŅĨéĨáĐ`ĨŋĖ―ËũÕ{ËÏó Ī―ĪėĪūĪė100ÍōĨĻĨÔĨ―Đ`ĨÉŅ§Á ÐÔÄÜÔuýĢš20ĨĻĨÔĨ―Đ`ĨÉĪÎËŲķČĄĒŨßÐÐūāëxĄĒĨëĐ`ĨČßxkÕý―âÂĘ ļũËŪĘĪĮÆ―ūųĪōĮóĪáĪëĄĢ ļîŌýÂĘĪČ4ĪÄĪÎóģęĪÎÖØĪßĪōÕ{ËĪ·ĄĒ gōYĪËÓÃĪĪĪëĨŅĨéĨáĐ`ĨŋĪōQķĻĪđĪëĄĢ gCŨßÐÐĪĮgōY 9
- 10. 0 0.5 1 1.5 2 2.5 3 3.5 4 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 0 5 10 15 20 25 30 ËŲķČ[m/s]ŨßÐÐūāëx[m] ĨëĐ`ĨČßxkÕý―âÂĘÓčägōY ―Yđû A order R course out A speed A lidarĶà ßM·Ũ·ūÂĘĪōÖØŌ ŨßÐÐūāëxĪōÖØŌ ņÓÃËŪĘĪōÓÃĪĪĪŋóģęšÍĪŽQķĻĪ·Īŋ Rsum = ?100 (ĨģĐ`ĨđĨĒĨĶĨČ) ?200 (RCĨŦĐ`ÍŽĘŋĪÎÐnÍŧ) 50? ????? ? 70?????? ?3??????? +150? ????? (?????????) 10 ĪđĪŲĪÆĪÎÖļËĪĮ Ũîßm ŨßÐÐūāëx ßM·Ũ·ūÂĘ ĪōÖØŌ ŨßÐÐūāëx ßM·Ũ·ūÂĘ ĪōÖØŌ
- 11. ĨŦĨęĨĨåĨéĨāŅ§Á ķÎëAĩÄĪËŅ§ÁÄÚČÝĪÎëyŌŨķČĪōĪĒĪēĪë·―ēß ĩÚŌŧķÎëA gCŨßÐÐ ĨģĐ`ĨđÉÏĪōŨßÐÐĪđĪëĪģĪČĪōŅ§ÁĪđĪë ĩÚķþķÎëA ÍĢÖđÜŨ·žÓ ĨģĐ`ĨđŌÔÍâĪÎÕÏšĶÎïĪÎÕJŨRĪōŅ§ÁĪđĪë ĩÚČýķÎëA ķþCŨßÐÐ gëHĪËŨßÐÐĪ·ĪÆĪĪĪëËûRCĨŦĐ`1ĖĻĪÎÕJŨR ĩÚËÄķÎëA ËÄCŨßÐÐ Ņ}ĘýĪÎËûRCĨŦĐ`ĪÎÕJŨRĪōŅ§ÁĪđĪë ĨŦĨęĨĨåĨéĨāŅ§ÁĪÎķÎëAÔOķĻ gCŨßÐÐ ķþCŨßÐÐ Yoshua Bengio, Jerome Louradour, Ronan Collobert, Jason Weston Ą°Curriculum LearningĄą ICML '09 Proceedings of the 26th Annual International Conference on Machine LearningĄą Pages 41-48 ÍĢÖđÜĀýÍĢÖđÜŨ·žÓ 11 ąūŅÐūŋĪÎđ ė
- 12. 0 1 2 3 4 5 6 7 ŨßÐÐūāëx[m] 0 0.2 0.4 0.6 0.8 1 ĨëĐ`ĨČßxkÕý―âÂĘŅ§ÁgōY ? gCŨßÐÐĪĮĪÏĪđĪŲĪÆĪÎÖļËĪĮÏō ÉÏĪŽŌĪéĪėĄĒÕýĪ·ĪŊŅ§ÁĪŽßMĪóĪĮĪĪ ĪëĄĢĨ°ĨéĨÕĪĮĪÏÉėĪÓīúĪŽŌĪéĪėĪëĄĢ ?ÍĢÖđÜŨ·žÓááĪÎŨßÐÐūāëxĪÏpÉŲ Ī·ĪÆĪĪĪëĪģĪČĪŽÕiĪßČĄĪėĪëĄĢ ?ķþCŨßÐÐĪĮĪÏČŦĪÆĪÎÖļËĪŽpÉŲ Ī·ĪÆĪĪĪë ĒÕh ŨßÐÐūāëxĪčĪęĪâĨëĐ`ĨČßxkÕý―âÂĘ ÏČĪđĪëß\ÜÖÆÓųĪŽÐÐĪïĪėĪÆĪĪĪë 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 0 1000000 2000000 3000000 4000000 5000000 ËŲĪĩ[m/s] Ņ§ÁŧØĘý ―üËÆĮúūĪÏĀÛ\―üËÆĪōņÓÃĪ·Īŋ gCŨßÐÐ ÍĢÖđÜ ķþCŨßÐÐ gōY ĨģĐ`Ĩđ 12
- 13. gōY―YđûĪÎĘÔ^ Ũó(īó) 1301.175 Ũó(ÖÐ) 1288.968 Ũó(ÐĄ) 1295.663 ÖąßM 1202.536 ÓŌ(ÐĄ) 1276.650 ÓŌ(ÖÐ) 1179.750 ÓŌ(īó) 1287.849 ÍĢÖđ 45.140 Ũó·―ÏōĪËßMĪāĪČÍĢÖđÜĪČÐnÍŧĪđĪëĪŽĄĒ ŨîīóýĪÎģöÁĶĪŽŨó(īó)ĪĮĪĒĪë ĨģĐ`ĨđĨĒĨĶĨČĪËĪčĪëpĩãĪōŧØąÜĪđĪëĪģĪČĪčĪę ĨëĐ`ĨČßxkóģęĪōĘÜĪąČĄĪëĪģĪČĪō ÖØŌĪ·Īŋß\ÜÖÆÓųĪōÐÐĪĶĘÂĪŽĪĒĪë ģöÁĶ(Q) ÄŋËĨëĐ`ĨČ ÍĢÖđÜŨ·žÓrĪÎŨî―KNNĪōÓÃĪĪĪÆ ģöÁĶĪōÕ{ËĪ·Īŋ ŨßÐÐÜ ÍĢ Öđ Ü ßM ÐÐ ·― Ïō 13
- 14. ĪÞĪČĪáĪČ―ņááĪÎÕđÍû ? gCŨßÐÐĪĮĪÏ3ĪÄĪÎÔuýÖļËĪËĪÄĪĪĪÆÕýģĢĪËŅ§ÁĪŽßMĪóĪĮĪĪĪëĪģĪČĪŽ ī_ÕJĪĩĪėĪŋ ? ÍĢÖđÜĪōŨ·žÓĪđĪëĪČŨßÐÐūāëxĪŽžÓĪ·ĪĘĪĪ ĄúĨëĐ`ĨČßxkĪōÖØŌĪ·Īŋß\ÜÖÆÓų ? gCĪÎŨßÐÐĪÎĪßĪËßmĪ·ĪŋĨŅĨéĨáĐ`ĨŋĪËĪĘĪÃĪÆĪ·ĪÞĪÃĪŋ ĄúĨŦĨęĨĨåĨéĨā°ĪËßmĪ·ĪŋĨŅĨéĨáĐ`ĨŋĪÎÔOķĻ 14
Editor's Notes
- #7: ŅÐūŋĪōÐÐĪĶĘąĪÎđĪ·ōĩã