–Я—А–µ–Ј–µ–љ—В–∞—Ж–Є—П –њ–Њ –і–µ—В–µ–Ї—В–Њ—А–∞–Љ —В—А–∞–љ—Б–њ–Њ—А—В–∞
0 likes1,246 views

–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В –Љ–µ—В–Њ–і—Л —Б–±–Њ—А–∞ —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е –њ–Њ—В–Њ–Ї–Њ–≤ –Є –≤–Ї–ї—О—З–∞–µ—В —Ж–µ–ї–Є, —В–∞–Ї–Є–µ –Ї–∞–Ї –Є–Ј—Г—З–µ–љ–Є–µ —В–µ–Ї—Г—Й–µ–є —Б–Є—В—Г–∞—Ж–Є–Є –Є –Њ–њ—В–Є–Љ–Є–Ј–∞—Ж–Є—П —А–∞–±–Њ—В—Л —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —Б–Є—Б—В–µ–Љ. –£–њ–Њ–Љ—П–љ—Г—В—Л —А–∞–Ј–ї–Є—З–љ—Л–µ —В–µ—Е–љ–Њ–ї–Њ–≥–Є–Є –і–ї—П —Б–±–Њ—А–∞ –і–∞–љ–љ—Л—Е, –≤–Ї–ї—О—З–∞—П –Ї–∞–Љ–µ—А—Л, —А–∞–і–∞—А—Л –Є –њ—А–Њ–≥—А–∞–Љ–Љ–љ–Њ–µ –Њ–±–µ—Б–њ–µ—З–µ–љ–Є–µ –і–ї—П –∞–љ–∞–ї–Є–Ј–∞ —В—А–∞—Д–Є–Ї–∞. –Ґ–∞–Ї–ґ–µ –і–µ—В–∞–ї–Є–Ј–Є—А—Г—О—В—Б—П —Д—Г–љ–Ї—Ж–Є–Є –Є —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї–Є –Њ–±–Њ—А—Г–і–Њ–≤–∞–љ–Є—П, —В–∞–Ї–Є—Е –Ї–∞–Ї —Г—Б—В—А–Њ–є—Б—В–≤–∞ '–≤–Њ–Ї–Њ—А–і' –Є 'rtms g4'.
1 of 12
Downloaded 17 times




Ad
Recommended
–Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ —Б–Ї–µ—В—З–µ—А–∞
–Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ —Б–Ї–µ—В—З–µ—А–∞–Р–ї–µ–Ї—Б–µ–є –С–Њ—А–Њ–≤—Б–Ї–Њ–є
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В –њ—А–Њ—Ж–µ—Б—Б —Б–Њ–Ј–і–∞–љ–Є—П –њ—А–µ–і–≤–∞—А–Є—В–µ–ї—М–љ–Њ–є —В–Њ–њ–Њ–ї–Њ–≥–Є–Є –Њ–±—К–µ–Ї—В–Њ–≤ —Б –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ–Љ –њ—А–Њ–≥—А–∞–Љ–Љ Autocad, Google Earth –Є Google Sketchup. –Т –љ–µ–Љ –њ—А–µ–і—Б—В–∞–≤–ї–µ–љ—Л —И–∞–≥–Є –њ–Њ –≤—Л–±–Њ—А—Г –Ї–Њ–љ—В—А–Њ–ї—М–љ—Л—Е —В–Њ—З–µ–Ї, —Г—Б—В–∞–љ–Њ–≤–Ї–µ –∞–љ–Ї–µ—А–љ—Л—Е —В–Њ—З–µ–Ї, –њ—А–µ–Њ–±—А–∞–Ј–Њ–≤–∞–љ–Є—О –і–∞–љ–љ—Л—Е –≤ —Д–Њ—А–Љ–∞—В—Л –і–ї—П –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є—П –≤ Autocad –Є —Б–Њ–Ј–і–∞–љ–Є—О –њ–∞—А–∞–Љ–µ—В—А–Є–Ј–Њ–≤–∞–љ–љ—Л—Е —З–µ—А—В–µ–ґ–µ–є. –Ґ–∞–Ї–ґ–µ —Г–њ–Њ–Љ–Є–љ–∞—О—В—Б—П –і–∞–ї—М–љ–µ–є—И–Є–µ —В–µ–Љ—Л, –Ї–Њ—В–Њ—А—Л–µ –±—Г–і—Г—В –Њ–±—Б—Г–ґ–і–∞—В—М—Б—П –≤ —А–∞–Љ–Ї–∞—Е –Ї—Г—А—Б–∞ '–Ї–Њ–Љ–њ—М—О—В–µ—А–љ–Њ–µ –Љ–Њ–і–µ–ї–Є—А–Њ–≤–∞–љ–Є–µ —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —Б–Є—Б—В–µ–Љ'.–Ш–љ—В–µ—А–љ–µ—В –Т–µ—Й–µ–є –Є–ї–Є Internet ofћэThings (IoT)ћэвАФ —Б–ї–µ–і—Г—О—Й–Є–є –≤–Є—В–Њ–Ї —А–∞–Ј–≤–Є—В–Є—П —В–µ–ї–µ–Ї–Њ...
–Ш–љ—В–µ—А–љ–µ—В –Т–µ—Й–µ–є –Є–ї–Є Internet ofћэThings (IoT)ћэвАФ —Б–ї–µ–і—Г—О—Й–Є–є –≤–Є—В–Њ–Ї —А–∞–Ј–≤–Є—В–Є—П —В–µ–ї–µ–Ї–Њ...uadeps
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В –Ї–Њ–љ—Ж–µ–њ—Ж–Є—О –Ш–љ—В–µ—А–љ–µ—В –≤–µ—Й–µ–є (IoT), –Ї–Њ—В–Њ—А–∞—П –≤–Ї–ї—О—З–∞–µ—В –≤ —Б–µ–±—П –≤—Л—З–Є—Б–ї–Є—В–µ–ї—М–љ—Л–µ —Б–µ—В–Є —Д–Є–Ј–Є—З–µ—Б–Ї–Є—Е –Њ–±—К–µ–Ї—В–Њ–≤, –Њ—Б–љ–∞—Й—С–љ–љ—Л—Е —В–µ—Е–љ–Њ–ї–Њ–≥–Є—П–Љ–Є –і–ї—П –≤–Ј–∞–Є–Љ–Њ–і–µ–є—Б—В–≤–Є—П –±–µ–Ј —Г—З–∞—Б—В–Є—П —З–µ–ї–Њ–≤–µ–Ї–∞. –Я—А–Є–≤–Њ–і—П—В—Б—П –і–∞–љ–љ—Л–µ –Њ —А–Њ—Б—В–µ —А—Л–љ–Ї–∞ IoT, –њ—А–Њ–≥–љ–Њ–Ј—Л –њ–Њ –Ї–Њ–ї–Є—З–µ—Б—В–≤—Г —Г—Б—В—А–Њ–є—Б—В–≤ –і–Њ 2030 –≥–Њ–і–∞ –Є –Њ—Б–љ–Њ–≤–љ—Л–µ —В–µ—Е–љ–Њ–ї–Њ–≥–Є–Є, –Є—Б–њ–Њ–ї—М–Ј—Г–µ–Љ—Л–µ –і–ї—П —А–µ–∞–ї–Є–Ј–∞—Ж–Є–Є IoT —А–µ—И–µ–љ–Є–є. –Ґ–∞–Ї–ґ–µ —А–∞—Б—Б–Љ–∞—В—А–Є–≤–∞—О—В—Б—П –њ—А–Є–Љ–µ–љ–µ–љ–Є—П –≤ —А–∞–Ј–ї–Є—З–љ—Л—Е –Њ—В—А–∞—Б–ї—П—Е, —В–∞–Ї–Є—Е –Ї–∞–Ї –њ—А–Њ–Љ—Л—И–ї–µ–љ–љ–Њ—Б—В—М, —Б–µ–ї—М—Б–Ї–Њ–µ —Е–Њ–Ј—П–є—Б—В–≤–Њ, —В—А–∞–љ—Б–њ–Њ—А—В –Є —Г–Љ–љ—Л–µ –≥–Њ—А–Њ–і–∞.—А–∞–±–Њ—В—Л –≤—Л–њ–Њ–ї–љ–µ–љ–љ—Л–µ –Ї–Њ–ї–ї–µ–Ї—В–Є–≤–Њ–Љ –њ—А–µ–і–њ—А–Є—П—В–Є—П V3
—А–∞–±–Њ—В—Л –≤—Л–њ–Њ–ї–љ–µ–љ–љ—Л–µ –Ї–Њ–ї–ї–µ–Ї—В–Є–≤–Њ–Љ –њ—А–µ–і–њ—А–Є—П—В–Є—П V3utjhubq
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В —А–∞–Ј—А–∞–±–Њ—В–Ї—Г –≤—Л—Б–Њ–Ї–Њ—В–Њ—З–љ–Њ–є –љ–∞–≤–Є–≥–∞—Ж–Є–Њ–љ–љ–Њ–є —Б–Є—Б—В–µ–Љ—Л –љ–∞ –Њ—Б–љ–Њ–≤–µ –њ—А–Є–µ–Љ–љ–Є–Ї–Њ–≤ –Љ–∞-GPS/GLONASS —Б —Б–∞–љ—В–Є–Љ–µ—В—А–Њ–≤–Њ–є –њ–Њ–≥—А–µ—И–љ–Њ—Б—В—М—О. –Я—А–Є–≤–µ–і–µ–љ—Л –≥–∞–±–∞—А–Є—В—Л, —В–Њ—З–љ–Њ—Б—В–љ—Л–µ —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї–Є –Є –≤–Њ–Ј–Љ–Њ–ґ–љ—Л–µ –Њ–±–ї–∞—Б—В–Є –њ—А–Є–Љ–µ–љ–µ–љ–Є—П —Б–Є—Б—В–µ–Љ—Л, –≤–Ї–ї—О—З–∞—П –њ–Њ–Ј–Є—Ж–Є–Њ–љ–Є—А–Њ–≤–∞–љ–Є–µ –∞–≤—В–Њ–Љ–Њ–±–Є–ї–µ–є –Є —Г–≥–ї–Њ–≤—Г—О –Њ—А–Є–µ–љ—В–∞—Ж–Є—О —Г—Б—В—А–Њ–є—Б—В–≤. –Ґ–∞–Ї–ґ–µ —Г–њ–Њ–Љ–Є–љ–∞—О—В—Б—П –Є—Б–њ—Л—В–∞–љ–Є—П —Б–Є—Б—В–µ–Љ—Л –Є –Є–љ—В–µ–≥—А–∞—Ж–Є—П —Б –і—А—Г–≥–Є–Љ–Є —В–µ—Е–љ–Њ–ї–Њ–≥–Є—П–Љ–Є –і–ї—П –њ–Њ–≤—Л—И–µ–љ–Є—П —В–Њ—З–љ–Њ—Б—В–Є –≤ –≥–Њ—А–Њ–і—Б–Ї–Є—Е —Г—Б–ї–Њ–≤–Є—П—Е.016 –∞—А–≥–Њ–љ —Н —Б –∞–Ї–њ
016 –∞—А–≥–Њ–љ —Н —Б –∞–Ї–њjournalrubezh
ћэ
–Ъ–Њ–Љ–њ–ї–µ–Ї—Б —В–µ—Е–љ–Є—З–µ—Б–Ї–Є—Е —Б—А–µ–і—Б—В–≤ —Б–≤—П–Ј–Є '–Р—А–≥–Њ–љ-–≠' –њ—А–µ–і–љ–∞–Ј–љ–∞—З–µ–љ –і–ї—П –Њ—А–≥–∞–љ–Є–Ј–∞—Ж–Є–Є —Ж–Є—Д—А–Њ–≤–Њ–є –Ї–Њ–љ—Д–Є–і–µ–љ—Ж–Є–∞–ї—М–љ–Њ–є —А–∞–і–Є–Њ—Б–≤—П–Ј–Є —Б –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В—М—О –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П –Љ–µ—Б—В–Њ–њ–Њ–ї–Њ–ґ–µ–љ–Є—П –∞–±–Њ–љ–µ–љ—В–Њ–≤ —Б –њ–Њ–Љ–Њ—Й—М—О GPS. –Ю–љ –≤–Ї–ї—О—З–∞–µ—В 75 –Є–Ј–і–µ–ї–Є–є, –≤–Ї–ї—О—З–∞—П –њ–Њ—А—В–∞—В–Є–≤–љ—Л–µ –Є —Б—В–∞—Ж–Є–Њ–љ–∞—А–љ—Л–µ —А–∞–і–Є–Њ—Б—В–∞–љ—Ж–Є–Є, GSM-—И–ї—О–Ј—Л –Є —А–µ—В—А–∞–љ—Б–ї—П—В–Њ—А—Л, –Њ–±–µ—Б–њ–µ—З–Є–≤–∞—П —Б–≤—П–Ј—М –≤ —Б–ї–Њ–ґ–љ—Л—Е —Г—Б–ї–Њ–≤–Є—П—Е. –°–Є—Б—В–µ–Љ–∞ –њ–Њ–Ј–≤–Њ–ї—П–µ—В –Њ–і–љ–Њ–≤—А–µ–Љ–µ–љ–љ—Г—О –њ–µ—А–µ–і–∞—З—Г —А–µ—З–Є –Є –і–∞–љ–љ—Л—Е —Б —А–∞–Ј–ї–Є—З–љ—Л–Љ–Є —Б—В–∞–љ–і–∞—А—В–∞–Љ–Є –Ј–∞—Й–Є—В—Л –Є —Г–њ—А–∞–≤–ї–µ–љ–Є—П.–Э–њ–Њ-–њ—А–Њ–Љ
–Э–њ–Њ-–њ—А–Њ–Љ gemozlobin
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В —Б–Є—Б—В–µ–Љ—Г –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥–∞ —В—А–∞–љ—Б–њ–Њ—А—В–∞, –≤–Ї–ї—О—З–∞—О—Й—Г—О —А–∞–Ј–ї–Є—З–љ—Л–µ —Б—Д–µ—А—Л, —В–∞–Ї–Є–µ –Ї–∞–Ї –Љ–Њ—А—Б–Ї–∞—П, –≤–Њ–Ј–і—Г—И–љ–∞—П –Є –љ–∞–Ј–µ–Љ–љ–∞—П –љ–∞–≤–Є–≥–∞—Ж–Є—П. –Ю—Б–љ–Њ–≤–љ—Л–Љ–Є —Д—Г–љ–Ї—Ж–Є—П–Љ–Є —Б–Є—Б—В–µ–Љ—Л —П–≤–ї—П—О—В—Б—П –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥ –Љ–µ—Б—В–Њ–њ–Њ–ї–Њ–ґ–µ–љ–Є—П –Є —Б–Њ—Б—В–Њ—П–љ–Є—П —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —Б—А–µ–і—Б—В–≤, —Г–њ—А–∞–≤–ї–µ–љ–Є–µ –Љ–∞—А—И—А—Г—В–∞–Љ–Є –Є –Ї–Њ–љ—В—А–Њ–ї—М –≤—Л–њ–Њ–ї–љ–µ–љ–Є—П –Ј–∞–і–∞–љ–Є–є, –∞ —В–∞–Ї–ґ–µ –Њ–±–µ—Б–њ–µ—З–µ–љ–Є–µ —Б–≤—П–Ј–Є —Б –≤–Њ–і–Є—В–µ–ї—П–Љ–Є. –°–Є—Б—В–µ–Љ–∞ –њ—А–µ–і–њ–Њ–ї–∞–≥–∞–µ—В –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ —Б–Њ–≤—А–µ–Љ–µ–љ–љ–Њ–≥–Њ –Њ–±–Њ—А—Г–і–Њ–≤–∞–љ–Є—П –Є —В–µ—Е–љ–Њ–ї–Њ–≥–Є–є, –Њ–±–µ—Б–њ–µ—З–Є–≤–∞—П —Г–і–Њ–±–љ—Г—О –Є–љ—В–µ–≥—А–∞—Ж–Є—О –Є —А–∞—Б—И–Є—А–µ–љ–љ—Л–µ —Д—Г–љ–Ї—Ж–Є–Њ–љ–∞–ї—М–љ—Л–µ –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є –і–ї—П –Ї–Њ—А–њ–Њ—А–∞—В–Є–≤–љ—Л—Е –Ї–ї–Є–µ–љ—В–Њ–≤.–Ґ–µ–љ–і–µ–љ—Ж–Є–Є —А–∞–Ј–≤–Є—В–Є—П —А—Л–љ–Ї–∞ —А–∞–і–∞—А–љ—Л—Е –і–∞–љ–љ—Л—Е –і–Ј–Ј –Є —Б—А–µ–і—Б—В–≤ –Є—Е –Њ–±—А–∞–±–Њ—В–Ї–Є
–Ґ–µ–љ–і–µ–љ—Ж–Є–Є —А–∞–Ј–≤–Є—В–Є—П —А—Л–љ–Ї–∞ —А–∞–і–∞—А–љ—Л—Е –і–∞–љ–љ—Л—Е –і–Ј–Ј –Є —Б—А–µ–і—Б—В–≤ –Є—Е –Њ–±—А–∞–±–Њ—В–Ї–ЄSOVZOND
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В —Б–Њ–і–µ—А–ґ–Є—В –Є–љ—Д–Њ—А–Љ–∞—Ж–Є—О –Њ —В–µ–љ–і–µ–љ—Ж–Є—П—Е –≤ —А–∞–Ј–≤–Є—В–Є–Є —А—Л–љ–Ї–∞ —А–∞–і–∞—А–љ—Л—Е –і–∞–љ–љ—Л—Е –і–Є—Б—В–∞–љ—Ж–Є–Њ–љ–љ–Њ–≥–Њ –Ј–Њ–љ–і–Є—А–Њ–≤–∞–љ–Є—П –Ч–µ–Љ–ї–Є, –≤–Ї–ї—О—З–∞—П —В–µ—Е–љ–Њ–ї–Њ–≥–Є–Є –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥–∞ —Б–Љ–µ—Й–µ–љ–Є–є –Є –і–µ—Д–Њ—А–Љ–∞—Ж–Є–є, –∞ —В–∞–Ї–ґ–µ –њ—А–Є–Љ–µ–љ–µ–љ–Є–µ –і–∞–љ–љ—Л—Е –≤ —А–∞–Ј–ї–Є—З–љ—Л—Е —Б—Д–µ—А–∞—Е, —В–∞–Ї–Є—Е –Ї–∞–Ї —Б–µ–ї—М—Б–Ї–Њ–µ —Е–Њ–Ј—П–є—Б—В–≤–Њ –Є –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥ —Б—Г–і–Њ—Е–Њ–і—Б—В–≤–∞. –Я—А–Њ–≥—А–∞–Љ–Љ–љ–Њ–µ –Њ–±–µ—Б–њ–µ—З–µ–љ–Є–µ Sarscape —Г–њ–Њ–Љ–Є–љ–∞–µ—В—Б—П –Ї–∞–Ї –Љ–љ–Њ–≥–Њ—Д—Г–љ–Ї—Ж–Є–Њ–љ–∞–ї—М–љ—Л–є –Є–љ—Б—В—А—Г–Љ–µ–љ—В –і–ї—П –Њ–±—А–∞–±–Њ—В–Ї–Є —Н—В–Є—Е –і–∞–љ–љ—Л—Е, –њ–Њ–і–і–µ—А–ґ–Є–≤–∞—О—Й–Є–є —А–∞–Ј–ї–Є—З–љ—Л–µ —В–µ—Е–љ–Њ–ї–Њ–≥–Є–Є –Є –Љ–µ—В–Њ–і–Є–Ї–Є –Є–љ—В–µ—А—Д–µ—А–Њ–Љ–µ—В—А–Є–Є. –Ґ–∞–Ї–ґ–µ –Њ–±—Б—Г–ґ–і–∞—О—В—Б—П —А–µ–Ј—Г–ї—М—В–∞—В—Л –њ—А–Њ–µ–Ї—В–Њ–≤, –≥–і–µ —А–∞–і–∞—А–љ—Л–µ –і–∞–љ–љ—Л–µ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–ї–Є—Б—М –і–ї—П –∞–љ–∞–ї–Є–Ј–∞ –і–µ—Д–Њ—А–Љ–∞—Ж–Є–є –Є —Б–Љ–µ—Й–µ–љ–Є–є –Ј–µ–Љ–љ–Њ–є –њ–Њ–≤–µ—А—Е–љ–Њ—Б—В–Є –≤ –Ъ–∞–Ј–∞—Е—Б—В–∞–љ–µ.–У–µ–Њ–Є–љ—Д–Њ—А–Љ–∞—В–Є–Ї–∞: –£—Б–ї—Г–≥–Є –њ–Њ –Њ–±—Г—Б—В—А–Њ–ЄћЖ—Б—В–≤—Г –≥–Њ—Б–≥—А–∞–љ–Є—Ж—Л
–У–µ–Њ–Є–љ—Д–Њ—А–Љ–∞—В–Є–Ї–∞: –£—Б–ї—Г–≥–Є –њ–Њ –Њ–±—Г—Б—В—А–Њ–ЄћЖ—Б—В–≤—Г –≥–Њ—Б–≥—А–∞–љ–Є—Ж—ЛSergey Zhdanov
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В —Г—Б–ї—Г–≥–Є –њ–Њ –Њ–±—Г—Б—В—А–Њ–є—Б—В–≤—Г –≥–Њ—Б—Г–і–∞—А—Б—В–≤–µ–љ–љ–Њ–є –≥—А–∞–љ–Є—Ж—Л –†–Њ—Б—Б–Є–Є, –њ—А–µ–і–Њ—Б—В–∞–≤–ї—П–µ–Љ—Л–µ –Ч–Р–Ю "–¶–µ–љ—В—А –Є–љ—Д—А–∞—Б—В—А—Г–Ї—В—Г—А–љ—Л—Е –њ—А–Њ–µ–Ї—В–Њ–≤", –≤–Ї–ї—О—З–∞—П —Б–±–Њ—А –Є –Њ–±—А–∞–±–Њ—В–Ї—Г –њ—А–Њ—Б—В—А–∞–љ—Б—В–≤–µ–љ–љ—Л—Е –і–∞–љ–љ—Л—Е, –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥ –Є –њ—А–Њ–≥–љ–Њ–Ј–Є—А–Њ–≤–∞–љ–Є–µ —З—А–µ–Ј–≤—Л—З–∞–є–љ—Л—Е —Б–Є—В—Г–∞—Ж–Є–є, –∞ —В–∞–Ї–ґ–µ –Є–љ–≤–µ–љ—В–∞—А–Є–Ј–∞—Ж–Є—О –Њ–±—К–µ–Ї—В–Њ–≤ –Є–љ—Д—А–∞—Б—В—А—Г–Ї—В—Г—А—Л –≥—А–∞–љ–Є—Ж—Л. –Т–∞–ґ–љ—Л–µ —В–µ—Е–љ–Њ–ї–Њ–≥–Є–Є –≤–Ї–ї—О—З–∞—О—В –ї–∞–Ј–µ—А–љ–Њ–µ —Б–Ї–∞–љ–Є—А–Њ–≤–∞–љ–Є–µ –Є –∞—Н—А–Њ—Б—К–µ–Љ–Ї—Г –і–ї—П —Б–Њ–Ј–і–∞–љ–Є—П —В–Њ—З–љ—Л—Е —В—А–µ—Е–Љ–µ—А–љ—Л—Е –Љ–Њ–і–µ–ї–µ–є –Є –Ї–∞—А—В. –Я—А–Є–≤–µ–і–µ–љ—Л –њ—А–Є–Љ–µ—А—Л —А–∞–љ–µ–µ –≤—Л–њ–Њ–ї–љ–µ–љ–љ—Л—Е –њ—А–Њ–µ–Ї—В–Њ–≤ –Є –Є—Е —А–µ–Ј—Г–ї—М—В–∞—В—Л, –њ–Њ–і—З–µ—А–Ї–Є–≤–∞—О—Й–Є–µ —Н—Д—Д–µ–Ї—В–Є–≤–љ–Њ—Б—В—М –Є —В–Њ—З–љ–Њ—Б—В—М –њ—А–µ–і–ї–∞–≥–∞–µ–Љ—Л—Е —А–µ—И–µ–љ–Є–є.–†-700–Ь
–†-700–ЬNTCRTS
ћэ
–°—В–∞—Ж–Є–Њ–љ–∞—А–љ–∞—П —А–∞–і–Є–Њ–њ–µ–ї–µ–љ–≥–∞—В–Њ—А–љ–∞—П —Б—В–∞–љ—Ж–Є—П HF –і–Є–∞–њ–∞–Ј–Њ–љ–∞ ¬Ђ–†-700–Ь¬ї –њ—А–µ–і–љ–∞–Ј–љ–∞—З–µ–љ–∞ –і–ї—П –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П –љ–∞–њ—А–∞–≤–ї–µ–љ–Є—П —А–∞–і–Є–Њ–≤–Њ–ї–љ –≤ –і–Є–∞–њ–∞–Ј–Њ–љ–µ —З–∞—Б—В–Њ—В 1.5вАУ30 –Ь–У—Ж –љ–∞ —А–∞—Б—Б—В–Њ—П–љ–Є–Є –і–Њ 2000 –Ї–Љ. –°—В–∞–љ—Ж–Є—П –≤–Ї–ї—О—З–∞–µ—В –∞–љ—В–µ–љ–љ—Г—О —Б–Є—Б—В–µ–Љ—Г, —Г—Б–Є–ї–Є—В–µ–ї–Є, —Ж–Є—Д—А–Њ–≤–Њ–µ –Њ–±–Њ—А—Г–і–Њ–≤–∞–љ–Є–µ –Є —Б–њ–µ—Ж–Є–∞–ї–Є–Ј–Є—А–Њ–≤–∞–љ–љ—Л–µ –±–ї–Њ–Ї–Є –і–ї—П –Њ–±—А–∞–±–Њ—В–Ї–Є —Б–Є–≥–љ–∞–ї–Њ–≤, –Њ–±–µ—Б–њ–µ—З–Є–≤–∞—П –≤—Л—Б–Њ–Ї—Г—О —В–Њ—З–љ–Њ—Б—В—М –Є–Ј–Љ–µ—А–µ–љ–Є–є –≤ —А–∞–Ј–ї–Є—З–љ—Л—Е —Г—Б–ї–Њ–≤–Є—П—Е. –Ю–љ–∞ –њ–Њ–і–і–µ—А–ґ–Є–≤–∞–µ—В –∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–Њ–µ –Є –≤–Є–Ј—Г–∞–ї—М–љ–Њ–µ –њ–µ–ї–µ–љ–≥–Њ–≤–∞–љ–Є–µ, –∞ —В–∞–Ї–ґ–µ –њ–Њ–Ј–≤–Њ–ї—П–µ—В –Є–љ—В–µ–≥—А–∞—Ж–Є—О —Б —Б–Є—Б—В–µ–Љ–∞–Љ–Є –Љ–µ—Б—В–Њ–Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П.–†–µ—И–µ–љ–Є—П Cisco –і–ї—П –Њ–њ—В–Є—З–µ—Б–Ї–Њ–≥–Њ —В—А–∞–љ—Б–њ–Њ—А—В–∞
–†–µ—И–µ–љ–Є—П Cisco –і–ї—П –Њ–њ—В–Є—З–µ—Б–Ї–Њ–≥–Њ —В—А–∞–љ—Б–њ–Њ—А—В–∞Cisco Russia
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –њ—А–µ–і—Б—В–∞–≤–ї—П–µ—В –Њ–±–Ј–Њ—А —Б–Њ–≤—А–µ–Љ–µ–љ–љ—Л—Е —А–µ—И–µ–љ–Є–є Cisco –і–ї—П –Њ–њ—В–Є—З–µ—Б–Ї–Њ–≥–Њ —В—А–∞–љ—Б–њ–Њ—А—В–∞, –≤–Ї–ї—О—З–∞—П –∞–љ–∞–ї–Є–Ј –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ—Б—В–µ–є –Є–Ј–Љ–µ–љ–µ–љ–Є—П —В–µ—Е–љ–Њ–ї–Њ–≥–Є–є –≤ —Г—Б–ї–Њ–≤–Є—П—Е —А–Њ—Б—В–∞ —В—А–∞—Д–Є–Ї–∞ –Є –Ј–∞–≤–µ—А—И–µ–љ–Є—П –ґ–Є–Ј–љ–µ–љ–љ–Њ–≥–Њ —Ж–Є–Ї–ї–∞ —В–∞–Ї–Є—Е —Б—В–∞–љ–і–∞—А—В–Њ–≤, –Ї–∞–Ї SONET/SDH. –Ю—Б–љ–Њ–≤–љ–Њ–µ –≤–љ–Є–Љ–∞–љ–Є–µ —Г–і–µ–ї—П–µ—В—Б—П –љ–Њ–≤—Л–Љ –∞—А—Е–Є—В–µ–Ї—В—Г—А–љ—Л–Љ —А–µ—И–µ–љ–Є—П–Љ –Є –Њ–њ—В–Є—З–µ—Б–Ї–Є–Љ –Љ–Њ–і—Г–ї—П–Љ, –≤–Ї–ї—О—З–∞—П –≥–Є–±–Ї–Є–µ —Б–њ–µ–Ї—В—А—Л, —Б—Г–њ–µ—А-–Ї–∞–љ–∞–ї—Л –Є —А–∞–Ј–≤–Є—В–Є–µ SDN –і–ї—П –њ–Њ–≤—Л—И–µ–љ–Є—П –љ–∞–і–µ–ґ–љ–Њ—Б—В–Є –Є –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї—М–љ–Њ—Б—В–Є —Б–µ—В–µ–є. –Ґ–∞–Ї–ґ–µ —А–∞—Б—Б–Љ–∞—В—А–Є–≤–∞—О—В—Б—П –њ—А–µ–Є–Љ—Г—Й–µ—Б—В–≤–∞ –Љ–Њ–і—Г–ї—М–љ–Њ–є –∞—А—Е–Є—В–µ–Ї—В—Г—А—Л –Є –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є –љ–∞—А–∞—Й–Є–≤–∞–љ–Є—П –µ–Љ–Ї–Њ—Б—В–Є.2010 Gucaluk diplom presentation
2010 Gucaluk diplom presentationRF-Lab
ћэ
–Ф–Є–њ–ї–Њ–Љ–љ—Л–є –њ—А–Њ–µ–Ї—В –љ–∞ —В–µ–Љ—Г —А–∞–Ј—А–∞–±–Њ—В–Ї–Є –њ—А–Њ–≥—А–∞–Љ–Љ–љ—Л—Е —Б—А–µ–і—Б—В–≤ –і–ї—П –Љ–Њ–і–µ–ї–Є—А–Њ–≤–∞–љ–Є—П —Б–Є–≥–љ–∞–ї–Њ–≤ —Б–Є—Б—В–µ–Љ—Л —Б–њ—Г—В–љ–Є–Ї–Њ–≤–Њ–≥–Њ –њ–Њ–Ј–Є—Ж–Є–Њ–љ–Є—А–Њ–≤–∞–љ–Є—П –≤–Ї–ї—О—З–∞–µ—В –Њ–±–Ј–Њ—А –∞–љ–∞–ї–Њ–≥–Є—З–љ—Л—Е —А–µ—И–µ–љ–Є–є, –∞–љ–∞–ї–Є–Ј –њ—А–Є–љ—Ж–Є–њ–Њ–≤ –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П –Ї–Њ–Њ—А–і–Є–љ–∞—В –Є –≥–µ–љ–µ—А–Є—А–Њ–≤–∞–љ–Є—П –љ–∞–≤–Є–≥–∞—Ж–Є–Њ–љ–љ–Њ–≥–Њ —Б–Є–≥–љ–∞–ї–∞. –Т –њ—А–Њ–µ–Ї—В–µ —А–∞—Б—Б–Љ–∞—В—А–Є–≤–∞—О—В—Б—П –љ–µ–≥–∞—В–Є–≤–љ—Л–µ —Д–∞–Ї—В–Њ—А—Л, –≤–ї–Є—П—О—Й–Є–µ –љ–∞ –њ–µ—А–µ–і–∞—З—Г —Б–Є–≥–љ–∞–ї–∞, –∞ —В–∞–Ї–ґ–µ —А–∞–Ј—А–∞–±–Њ—В–Ї–∞ –Љ–Њ–і–µ–ї–Є –Ї–∞–љ–∞–ї–∞, –њ–Њ–Ј–≤–Њ–ї—П—О—Й–µ–є —Б–Љ–Њ–і–µ–ї–Є—А–Њ–≤–∞—В—М —А–µ–∞–ї—М–љ—Л–µ —Г—Б–ї–Њ–≤–Є—П. –Т –Є—В–Њ–≥–µ —Б–Њ–Ј–і–∞–љ–Њ –њ—А–Њ–≥—А–∞–Љ–Љ–љ–Њ–µ –Њ–±–µ—Б–њ–µ—З–µ–љ–Є–µ –і–ї—П –≥–µ–љ–µ—А–∞—Ж–Є–Є –≤—Л—Е–Њ–і–љ–Њ–≥–Њ —Б–Є–≥–љ–∞–ї–∞, —Б–Њ–Њ—В–≤–µ—В—Б—В–≤—Г—О—Й–µ–≥–Њ —А–∞–Ј—А–∞–±–Њ—В–∞–љ–љ–Њ–є –Љ–Њ–і–µ–ї–Є.Vladimir klimov
Vladimir klimovjournalrubezh
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В —А–∞–Ј–≤–Є—В–Є–µ –Є —Б–Њ–≤—А–µ–Љ–µ–љ–љ–Њ–µ —Б–Њ—Б—В–Њ—П–љ–Є–µ —Б–Є—Б—В–µ–Љ—Л –У–Ы–Ю–Э–Р–°–°, –≤–Ї–ї—О—З–∞—П –Њ—Б–љ–Њ–≤–љ—Л–µ –Ј–∞–і–∞—З–Є –њ—А–Њ–≥—А–∞–Љ–Љ—Л, —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї—Г –Ї–Њ—Б–Љ–Є—З–µ—Б–Ї–Є—Е –∞–њ–њ–∞—А–∞—В–Њ–≤ –Є –њ–ї–∞–љ—Л –њ–Њ –Ј–∞–њ—Г—Б–Ї—Г –љ–Њ–≤—Л—Е —Б–њ—Г—В–љ–Є–Ї–Њ–≤ –і–Њ 2020 –≥–Њ–і–∞. –Ю—Б–љ–Њ–≤–љ–Њ–µ –≤–љ–Є–Љ–∞–љ–Є–µ —Г–і–µ–ї—П–µ—В—Б—П —Г–ї—Г—З—И–µ–љ–Є—О –Ї–∞—З–µ—Б—В–≤–∞ –љ–∞–≤–Є–≥–∞—Ж–Є–Њ–љ–љ—Л—Е —Г—Б–ї—Г–≥, –Є–љ—В–µ–≥—А–∞—Ж–Є–Є —Б –Љ–µ–ґ–і—Г–љ–∞—А–Њ–і–љ—Л–Љ–Є —Б–Є—Б—В–µ–Љ–∞–Љ–Є –Є —А–∞–Ј—А–∞–±–Њ—В–Ї–µ –љ–Њ–≤—Л—Е —В–µ—Е–љ–Њ–ї–Њ–≥–Є–є. –Ґ–∞–Ї–ґ–µ –Њ–±—Б—Г–ґ–і–∞—О—В—Б—П –Љ–µ–ґ–і—Г–љ–∞—А–Њ–і–љ–Њ–µ —Б–Њ—В—А—Г–і–љ–Є—З–µ—Б—В–≤–Њ –Є –њ–ї–∞–љ—Л –њ–Њ —Б–Њ–Ј–і–∞–љ–Є—О —Б–Њ–≤–Љ–µ—Б—В–љ–Њ–≥–Њ –Є–љ–љ–Њ–≤–∞—Ж–Є–Њ–љ–љ–Њ–≥–Њ —Ж–µ–љ—В—А–∞ —Б –Ъ–Є—В–∞–µ–Љ.–Я—А–µ–Ј–µ–љ—В–∞—Ж–Є—П –Ю–Ю–Ю "–Р–°–Т-–Ґ–µ—Е–љ–Є–Ї—Б"
–Я—А–µ–Ј–µ–љ—В–∞—Ж–Є—П –Ю–Ю–Ю "–Р–°–Т-–Ґ–µ—Е–љ–Є–Ї—Б"kulibin
ћэ
–§–Є—А–Љ–∞ '–Р–°–Т-–Ґ–µ—Е–љ–Є–Ї—Б' –Њ—Б–љ–Њ–≤–∞–љ–∞ –≤ 1998 –≥–Њ–і—Г –≤ –Ю–±–љ–Є–љ—Б–Ї–µ –Є –Ј–∞–љ–Є–Љ–∞–µ—В—Б—П —А–∞–Ј—А–∞–±–Њ—В–Ї–Њ–є –Є –њ—А–Њ–Є–Ј–≤–Њ–і—Б—В–≤–Њ–Љ —Б–Є—Б—В–µ–Љ –≤–Є–і–µ–Њ–љ–∞–±–ї—О–і–µ–љ–Є—П —Б —И–Є—А–Њ–Ї–Є–Љ —Б–њ–µ–Ї—В—А–Њ–Љ —Д—Г–љ–Ї—Ж–Є–Њ–љ–∞–ї–∞. –°—А–µ–і–Є –њ—А–Њ–і—Г–Ї—Ж–Є–Є - –∞–≤—В–Њ–Љ–Њ–±–Є–ї—М–љ—Л–µ –≤–Є–і–µ–Њ—А–µ–≥–Є—Б—В—А–∞—В–Њ—А—Л, —Б—В–∞—Ж–Є–Њ–љ–∞—А–љ—Л–µ —Г—Б—В—А–Њ–є—Б—В–≤–∞ –Є —Б–Є—Б—В–µ–Љ—Л –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥–∞, –Ї–Њ—В–Њ—А—Л–µ —Б–µ—А—В–Є—Д–Є—Ж–Є—А–Њ–≤–∞–љ—Л –Є –Є–Љ–µ—О—В –њ–∞—В–µ–љ—В—Л. –Ъ–Њ–Љ–њ–∞–љ–Є—П –њ—А–µ–і–ї–∞–≥–∞–µ—В –Ї–∞—З–µ—Б—В–≤–µ–љ–љ–Њ–µ –Њ–±—Б–ї—Г–ґ–Є–≤–∞–љ–Є–µ, –Є–љ–і–Є–≤–Є–і—Г–∞–ї—М–љ—Л–µ —А–µ—И–µ–љ–Є—П –і–ї—П –Ї–ї–Є–µ–љ—В–Њ–≤ –Є –∞–Ї—В–Є–≤–љ–Њ–µ —Б–Њ—В—А—Г–і–љ–Є—З–µ—Б—В–≤–Њ —Б –њ–∞—А—В–љ–µ—А–∞–Љ–Є –њ–Њ –≤—Б–µ–є –†–Њ—Б—Б–Є–Є.–Ґ–∞—Е–Њ–≥—А–∞—Д VR2400
–Ґ–∞—Е–Њ–≥—А–∞—Д VR2400–°–≤—Ц—В–∞—Е–Њ
ћэ
–Ґ–∞—Е–Њ–≥—А–∞—Д v 24 0 r 0 —П–≤–ї—П–µ—В—Б—П —Г–љ–Є–≤–µ—А—Б–∞–ї—М–љ—Л–Љ —Г—Б—В—А–Њ–є—Б—В–≤–Њ–Љ, —Б–Њ–≤–Љ–µ—Б—В–Є–Љ—Л–Љ —Б –±–Њ–ї—М—И–Є–љ—Б—В–≤–Њ–Љ —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —Б—А–µ–і—Б—В–≤, –≤–Ї–ї—О—З–∞—П –∞–≤—В–Њ–Љ–Њ–±–Є–ї–Є —Б–Њ–≤–µ—В—Б–Ї–Њ–≥–Њ –њ—А–Њ–Є–Ј–≤–Њ–і—Б—В–≤–∞. –Ю–љ –Є–Љ–µ–µ—В —А–∞–Ј–ї–Є—З–љ—Л–µ —А–µ–ґ–Є–Љ—Л —А–∞–±–Њ—В—Л –Є —В–µ—Е–љ–Є—З–µ—Б–Ї–Є–µ —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї–Є, —Г–і–Њ–≤–ї–µ—В–≤–Њ—А—П—О—Й–Є–µ —Б—В–∞–љ–і–∞—А—В–∞–Љ –Х–° 95/54/EC, –∞ —В–∞–Ї–ґ–µ —Б–њ–Њ—Б–Њ–±–µ–љ —А–µ–≥–Є—Б—В—А–Є—А–Њ–≤–∞—В—М –і–∞–љ–љ—Л–µ –Њ —Б–Ї–Њ—А–Њ—Б—В–Є, —А–∞—Б—Б—В–Њ—П–љ–Є–Є –Є –≤—А–µ–Љ–µ–љ–Є. –£—Б—В—А–Њ–є—Б—В–≤–Њ —В–∞–Ї–ґ–µ –Њ–±–ї–∞–і–∞–µ—В –Ї–Њ–Љ–њ–∞–Ї—В–љ—Л–Љ–Є —А–∞–Ј–Љ–µ—А–∞–Љ–Є –Є –Љ–Њ–ґ–µ—В –±—Л—В—М —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ–Њ –≤ –њ–∞–љ–µ–ї—М –њ—А–Є–±–Њ—А–Њ–≤.–Ю–±–Ј–Њ—А –Є –љ–Њ–≤—Л–µ –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є –∞—А—Е–Є—В–µ–Ї—В—Г—А—Л CisconLight. –Я–ї–∞—В—Д–Њ—А–Љ–∞ NCS 2000
–Ю–±–Ј–Њ—А –Є –љ–Њ–≤—Л–µ –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є –∞—А—Е–Є—В–µ–Ї—В—Г—А—Л CisconLight. –Я–ї–∞—В—Д–Њ—А–Љ–∞ NCS 2000Cisco Russia
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –њ—А–µ–і—Б—В–∞–≤–ї—П–µ—В —Б–Њ–±–Њ–є –Њ–±–Ј–Њ—А –∞—А—Е–Є—В–µ–Ї—В—Г—А—Л Cisco nLight –Є –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–µ–є –њ–ї–∞—В—Д–Њ—А–Љ—Л NCS 2000, –њ–Њ–і—З–µ—А–Ї–љ—Г–≤ –≤–∞–ґ–љ–Њ—Б—В—М –Ї–Њ–љ–≤–µ—А–≥–µ–љ—Ж–Є–Є, –≥–Є–±–Ї–Њ—Б—В–Є –Є –Љ–∞—Б—И—В–∞–±–Є—А—Г–µ–Љ–Њ—Б—В–Є –≤ —Б–Њ–≤—А–µ–Љ–µ–љ–љ—Л—Е —Б–µ—В—П—Е. –Т –љ–µ–Љ –Њ–њ–Є—Б–∞–љ—Л –Ї–ї—О—З–µ–≤—Л–µ –Ї–Њ–Љ–њ–Њ–љ–µ–љ—В—Л, —В–∞–Ї–Є–µ –Ї–∞–Ї –≤—Л—Б–Њ–Ї–Њ—Б–Ї–Њ—А–Њ—Б—В–љ—Л–µ —В—А–∞–љ—Б–њ–Њ–љ–і–µ—А—Л –Є —А–∞–Ј–ї–Є—З–љ—Л–µ –Љ–Њ–і—Г–ї–Є, –∞ —В–∞–Ї–ґ–µ –≤–љ–µ–і—А–µ–љ–Є–µ –њ—А–Њ–≥—А–∞–Љ–Љ–љ–Њ —Г–њ—А–∞–≤–ї—П–µ–Љ—Л—Е —А–µ—И–µ–љ–Є–є –і–ї—П –Њ–њ—В–Є–Љ–Є–Ј–∞—Ж–Є–Є —Б–µ—В–µ–≤–Њ–є –Є–љ—Д—А–∞—Б—В—А—Г–Ї—В—Г—А—Л. –Т—Л–і–µ–ї—П—О—В—Б—П –њ—А–µ–Є–Љ—Г—Й–µ—Б—В–≤–∞, —В–∞–Ї–Є–µ –Ї–∞–Ї —Б–љ–Є–ґ–µ–љ–Є–µ –Ї–∞–њ–Є—В–∞–ї—М–љ—Л—Е –Є –Њ–њ–µ—А–∞—Ж–Є–Њ–љ–љ—Л—Е –Ј–∞—В—А–∞—В, –∞ —В–∞–Ї–ґ–µ –∞–і–∞–њ—В–∞—Ж–Є—П –Ї —В—А–µ–±–Њ–≤–∞–љ–Є—П–Љ —А—Л–љ–Ї–∞.–Э–∞—И–Є —А–∞–Ј—А–∞–±–Њ—В–Ї–Є.
–Э–∞—И–Є —А–∞–Ј—А–∞–±–Њ—В–Ї–Є.Shelena-weres
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В —Б–Њ–і–µ—А–ґ–Є—В —В–µ—Е–љ–Є—З–µ—Б–Ї–Є–µ —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї–Є —А–∞–Ј–ї–Є—З–љ—Л—Е –≥–Є–і—А–Њ–∞–Ї—Г—Б—В–Є—З–µ—Б–Ї–Є—Е —Г—Б—В—А–Њ–є—Б—В–≤ –Є —Б–Є—Б—В–µ–Љ —Б–≤—П–Ј–Є, –≤–Ї–ї—О—З–∞—П –њ–Њ–Ї–∞–Ј–∞—В–µ–ї–Є –Є—Е –і–∞–ї—М–љ–Њ—Б—В–Є, —В–Њ—З–љ–Њ—Б—В–Є –Є —Б—А–Њ–Ї–Њ–≤ —Б–ї—Г–ґ–±—Л. –Ю—Б–љ–Њ–≤–љ—Л–µ —Н–ї–µ–Љ–µ–љ—В—Л –≤–Ї–ї—О—З–∞—О—В –њ—Г–ї—М—В —Г–њ—А–∞–≤–ї–µ–љ–Є—П, –∞–љ—В–µ–љ–љ—Л –Є –љ–∞–±–Њ—А —Г—Б—В—А–Њ–є—Б—В–≤ –і–ї—П —Б–≤—П–Ј–Є –љ–∞ —А–∞–Ј–ї–Є—З–љ—Л—Е —З–∞—Б—В–Њ—В–∞—Е. –Ґ–∞–Ї–ґ–µ –Њ–њ–Є—Б–∞–љ—Л –њ–∞—А–∞–Љ–µ—В—А—Л —А–∞–±–Њ—В—Л –≤ —А–∞–Ј–ї–Є—З–љ—Л—Е —А–µ–ґ–Є–Љ–∞—Е –Є –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є –і–∞–љ–љ–Њ–є –∞–њ–њ–∞—А–∞—В—Г—А—Л.–њ—А–µ–Ј–µ–љ—В–∞—Ж–Є—П 2
–њ—А–µ–Ј–µ–љ—В–∞—Ж–Є—П 2InterExpo Geo-siberia
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–±—Б—Г–ґ–і–∞–µ—В –њ—А–Є–Љ–µ–љ–µ–љ–Є–µ –Љ–µ—В–Њ–і–∞ —В–Њ—З–љ–Њ–≥–Њ —В–Њ—З–µ—З–љ–Њ–≥–Њ –њ–Њ–Ј–Є—Ж–Є–Њ–љ–Є—А–Њ–≤–∞–љ–Є—П (PPP) –і–ї—П –≥–µ–Њ–і–µ–Ј–Є—З–µ—Б–Ї–Њ–≥–Њ –Њ–±–µ—Б–њ–µ—З–µ–љ–Є—П –∞—Н—А–Њ—Н–ї–µ–Ї—В—А–Њ—А–∞–Ј–≤–µ–і–Њ—З–љ—Л—Е —А–∞–±–Њ—В, –∞–Ї—Ж–µ–љ—В–Є—А—Г—П –≤–љ–Є–Љ–∞–љ–Є–µ –љ–∞ –µ–≥–Њ —В–Њ—З–љ–Њ—Б—В–Є –Є –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В—П—Е —Г–ї—Г—З—И–µ–љ–Є—П –Њ–±—А–∞–±–Њ—В–Ї–Є –і–∞–љ–љ—Л—Е. –Ь–µ—В–Њ–і –±—Л–ї –њ—А–Њ—В–µ—Б—В–Є—А–Њ–≤–∞–љ –љ–∞ –Т–∞–љ–Ї–Њ—А—Б–Ї–Њ–Љ –Љ–µ—Б—В–Њ—А–Њ–ґ–і–µ–љ–Є–Є, –Є —А–µ–Ј—Г–ї—М—В–∞—В—Л –њ–Њ–Ї–∞–Ј—Л–≤–∞—О—В –≤—Л—Б–Њ–Ї—Г—О —В–Њ—З–љ–Њ—Б—В—М –≤ –њ–ї–∞–љ–Њ–≤—Л—Е –Ї–Њ–Њ—А–і–Є–љ–∞—В–∞—Е –Є –њ—А–Є–µ–Љ–ї–µ–Љ—Г—О –њ–Њ –≤—Л—Б–Њ—В–µ. –Ю—Б–љ–Њ–≤–љ—Л–Љ–Є –њ—А–µ–Є–Љ—Г—Й–µ—Б—В–≤–∞–Љ–Є –Љ–µ—В–Њ–і–∞ —П–≤–ї—П—О—В—Б—П –Њ—В—Б—Г—В—Б—В–≤–Є–µ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ—Б—В–Є –≤ —Г—Б—В–∞–љ–Њ–≤–Ї–µ –±–∞–Ј–Њ–≤—Л—Е —Б—В–∞–љ—Ж–Є–є –Є –≤—Л—Б–Њ–Ї–∞—П —В–Њ—З–љ–Њ—Б—В—М, –Њ–і–љ–∞–Ї–Њ –µ—Б—В—М –љ–µ–і–Њ—Б—В–∞—В–Ї–Є, —Б–≤—П–Ј–∞–љ–љ—Л–µ —Б –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ—Б—В—М—О –і–Њ—Б—В—Г–њ–∞ –≤ –Є–љ—В–µ—А–љ–µ—В –Є –≤–Њ–Ј–Љ–Њ–ґ–љ—Л–Љ–Є –Ј–∞–і–µ—А–ґ–Ї–∞–Љ–Є –≤ –њ–Њ–ї—Г—З–µ–љ–Є–Є –і–∞–љ–љ—Л—Е.Electronic timetable system in city bus stops
Electronic timetable system in city bus stopsinfoforum
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В —Б–Є—Б—В–µ–Љ—Г –≥–Њ—А–Њ–і—Б–Ї–Є—Е –Њ–њ–Њ–≤–µ—Й–µ–љ–Є–є –Є –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥–∞ —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —Б—А–µ–і—Б—В–≤, –≤–Ї–ї—О—З–∞—П –≤–Є–і–µ–Њ –љ–∞–±–ї—О–і–µ–љ–Є–µ –Є —Н–ї–µ–Ї—В—А–Њ–љ–љ—Л–µ —В–∞–±–ї–Њ –љ–∞ –Њ—Б—В–∞–љ–Њ–≤–Ї–∞—Е. –Я—А–Њ–µ–Ї—В –њ—А–µ–і–њ–Њ–ї–∞–≥–∞–µ—В –Њ–Ї—Г–њ–∞–µ–Љ–Њ—Б—В—М –Є–љ–≤–µ—Б—В–Є—Ж–Є–є –Ј–∞ 2-3 –≥–Њ–і–∞ –Ј–∞ —Б—З–µ—В —А–µ–Ї–ї–∞–Љ—Л –Є –Њ—Б–≤–µ—Й–µ–љ–Є—П —Б–Є–љ—Е—А–Њ–љ–љ–Њ–є –Є–љ—Д–Њ—А–Љ–∞—Ж–Є–Є –Њ –њ—А–Є–±—Л—В–Є–Є —В—А–∞–љ—Б–њ–Њ—А—В–∞. –Ґ–∞–Ї–ґ–µ –Њ—Е–≤–∞—В—Л–≤–∞—О—В—Б—П —В–µ—Е–љ–Њ–ї–Њ–≥–Є–Є –і–ї—П —Б–±–Њ—А–∞ –Є –∞–љ–∞–ї–Є–Ј–∞ –і–∞–љ–љ—Л—Е, –∞ —В–∞–Ї–ґ–µ —Г–њ—А–∞–≤–ї–µ–љ–Є–µ —А–µ–Ї–ї–∞–Љ–љ—Л–Љ –Ї–Њ–љ—В–µ–љ—В–Њ–Љ —З–µ—А–µ–Ј –≤–µ–±-–Є–љ—В–µ—А—Д–µ–є—Б—Л.–У–Є–±–Ї–Є–µ –њ–µ—А–µ—Б—В—А–∞–Є–≤–∞–µ–Љ—Л–µ —Г–Ј–ї—Л –≤–≤–Њ–і–∞- –≤—Л–≤–Њ–і–∞ –љ–Њ–≤–Њ–≥–Њ –њ–Њ–Ї–Њ–ї–µ–љ–Є—П вАУ Cisco nLight ROADM
–У–Є–±–Ї–Є–µ –њ–µ—А–µ—Б—В—А–∞–Є–≤–∞–µ–Љ—Л–µ —Г–Ј–ї—Л –≤–≤–Њ–і–∞- –≤—Л–≤–Њ–і–∞ –љ–Њ–≤–Њ–≥–Њ –њ–Њ–Ї–Њ–ї–µ–љ–Є—П вАУ Cisco nLight ROADM Cisco Russia
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В –∞—А—Е–Є—В–µ–Ї—В—Г—А—Г –љ–Њ–≤–Њ–≥–Њ –њ–Њ–Ї–Њ–ї–µ–љ–Є—П ROADM Cisco NLight, –Ї–Њ—В–Њ—А–∞—П –Њ–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В –≤—Л—Б–Њ–Ї—Г—О –≥–Є–±–Ї–Њ—Б—В—М, –Љ–∞—Б—И—В–∞–±–Є—А—Г–µ–Љ–Њ—Б—В—М –Є –∞–≤—В–Њ–Љ–∞—В–Є–Ј–∞—Ж–Є—О –і–ї—П —Б–µ—В–µ–є DWDM. –Ю—Б–љ–Њ–≤–љ–Њ–µ –≤–љ–Є–Љ–∞–љ–Є–µ —Г–і–µ–ї—П–µ—В—Б—П –Є–љ–љ–Њ–≤–∞—Ж–Є—П–Љ –≤ –Њ–±–ї–∞—Б—В–Є –Њ–±—А–∞–±–Њ—В–Ї–Є —Б–њ–µ–Ї—В—А–∞, –≤–Ї–ї—О—З–∞—П –њ–Њ–і–і–µ—А–ґ–Ї—Г –і–Њ 96 –Ї–∞–љ–∞–ї–Њ–≤ —Б —И–∞–≥–Њ–Љ 50 –У–У—Ж –Є –Є–љ—В–µ–≥—А–∞—Ж–Є—О –љ–Њ–≤—Л—Е –Њ–њ—В–Є—З–µ—Б–Ї–Є—Е –Љ—Г–ї—М—В–Є–њ–ї–µ–Ї—Б–Њ—А–Њ–≤. –Ґ–µ—Е–љ–Њ–ї–Њ–≥–Є–Є —Ж–≤–µ—В–љ—Л—Е –Є –±–µ–Ј—Ж–≤–µ—В–љ—Л—Е –њ–Њ—А—В–Њ–≤, –∞ —В–∞–Ї–ґ–µ –Љ–љ–Њ–≥–Њ–њ–Њ—А—В–Њ–≤—Л–µ –њ–∞—Б—Б–Є–≤–љ—Л–µ –њ–∞—В—З-–њ–∞–љ–µ–ї–Є —Б–Њ–Ј–і–∞—О—В –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є –і–ї—П –њ–Њ—Б—В—А–Њ–µ–љ–Є—П –њ–Њ–ї–љ–Њ—Б—В—М—О –њ–µ—А–µ–љ–∞—Б—В—А–∞–Є–≤–∞–µ–Љ—Л—Е —Б–µ—В–µ–≤—Л—Е –Є–љ—Д—А–∞—Б—В—А—Г–Ї—В—Г—А.–Њ–њ–Є—Б–∞–љ–Є–µ –±–Њ—А—В–Њ–≤–Њ–≥–Њ –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–∞ Locarus 702
–Њ–њ–Є—Б–∞–љ–Є–µ –±–Њ—А—В–Њ–≤–Њ–≥–Њ –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–∞ Locarus 702guest08fd05
ћэ
–С–Њ—А—В–Њ–≤–Њ–є –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А Locarus 702 –њ—А–µ–і–љ–∞–Ј–љ–∞—З–µ–љ –і–ї—П –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥–∞ –њ–∞—А–∞–Љ–µ—В—А–Њ–≤ —В—А–∞–љ—Б–њ–Њ—А—В–љ–Њ–≥–Њ —Б—А–µ–і—Б—В–≤–∞, –≤–Ї–ї—О—З–∞—П –Љ–µ—Б—В–Њ–њ–Њ–ї–Њ–ґ–µ–љ–Є–µ, –њ—А–Њ–±–µ–≥ –Є —Б–Ї–Њ—А–Њ—Б—В—М. –Ю–љ –њ–Њ–і–і–µ—А–ґ–Є–≤–∞–µ—В –і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ—Л–µ –і–∞—В—З–Є–Ї–Є –Є –Љ–Њ–ґ–µ—В –Њ—Б—Г—Й–µ—Б—В–≤–ї—П—В—М —Г–і–∞–ї–µ–љ–љ–Њ–µ —Г–њ—А–∞–≤–ї–µ–љ–Є–µ —З–µ—А–µ–Ј –Љ–Њ–±–Є–ї—М–љ—Л–µ —Г—Б—В—А–Њ–є—Б—В–≤–∞ –Є –Я–Ъ. –£—Б—В—А–Њ–є—Б—В–≤–Њ –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В GPS –Є GPRS —В–µ—Е–љ–Њ–ї–Њ–≥–Є–Є, –Њ–±–µ—Б–њ–µ—З–Є–≤–∞—П —Г–њ—А–∞–≤–ї–µ–љ–Є–µ –Є –Ї–Њ–љ—В—А–Њ–ї—М –≤ —А–µ–∞–ї—М–љ–Њ–Љ –≤—А–µ–Љ–µ–љ–Є.195
195nreferat
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В —Б—В—А—Г–Ї—В—Г—А—Г –Є –∞–ї–≥–Њ—А–Є—В–Љ—Л —А–∞–±–Њ—В—Л —Б–њ—Г—В–љ–Є–Ї–Њ–≤—Л—Е —А–∞–і–Є–Њ–љ–∞–≤–Є–≥–∞—Ж–Є–Њ–љ–љ—Л—Е —Б–Є—Б—В–µ–Љ, –≤–Ї–ї—О—З–∞—П –њ—А–Є–љ—Ж–Є–њ—Л —А–∞–±–Њ—В—Л —Б–Є—Б—В–µ–Љ –У–Ы–Ю–Э–Р–°–° –Є GPS, –Є—Е –Ї–ї—О—З–µ–≤—Л–µ –њ–Њ–і—Б–Є—Б—В–µ–Љ—Л –Є —Д—Г–љ–Ї—Ж–Є–Њ–љ–∞–ї—М–љ—Л–µ –Њ–њ–µ—А–∞—Ж–Є–Є. –Ю—Б–љ–Њ–≤–љ–Њ–µ –≤–љ–Є–Љ–∞–љ–Є–µ —Г–і–µ–ї—П–µ—В—Б—П –Љ–µ—В–Њ–і–∞–Љ –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П –Ї–Њ–Њ—А–і–Є–љ–∞—В –њ–Њ—В—А–µ–±–Є—В–µ–ї–µ–є, –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ–Љ —А–∞–Ј–ї–Є—З–љ—Л—Е –њ–Њ–і—Е–Њ–і–Њ–≤, —В–∞–Ї–Є—Е –Ї–∞–Ї –і–∞–ї—М–љ–Њ–Љ–µ—А–љ—Л–µ –Є —А–∞–Ј–љ–Њ—Б—В–љ–Њ-–і–∞–ї—М–љ–Њ–Љ–µ—А–љ—Л–µ –Љ–µ—В–Њ–і—Л, –∞ —В–∞–Ї–ґ–µ —А–∞—Б—Б–Љ–Њ—В—А–µ–љ—Л —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї–Є –Є —Д—Г–љ–Ї—Ж–Є–Є –љ–∞–≤–Є–≥–∞—Ж–Є–Њ–љ–љ—Л—Е —Б–Є–≥–љ–∞–ї–Њ–≤. –Т –Ј–∞–Ї–ї—О—З–µ–љ–Є–µ, –Њ—Б–≤–µ—Й–∞—О—В—Б—П –∞–ї–≥–Њ—А–Є—В–Љ—Л –Њ–±—А–∞–±–Њ—В–Ї–Є —Б–Є–≥–љ–∞–ї–Њ–≤ –Є –Є–Ј–≤–ї–µ—З–µ–љ–Є—П –љ–∞–≤–Є–≥–∞—Ж–Є–Њ–љ–љ–Њ–є –Є–љ—Д–Њ—А–Љ–∞—Ж–Є–Є, –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ–є –і–ї—П —В–Њ—З–љ–Њ–≥–Њ –њ–Њ–Ј–Є—Ж–Є–Њ–љ–Є—А–Њ–≤–∞–љ–Є—П.–Ґ–Є–њ–Њ–≤—Л–µ —Б–µ—А–≤–Є—Б—Л —А–µ–≥–Є–Њ–љ–∞–ї—М–љ–Њ–є —Б–µ—В–Є –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—Е
–Ґ–Є–њ–Њ–≤—Л–µ —Б–µ—А–≤–Є—Б—Л —А–µ–≥–Є–Њ–љ–∞–ї—М–љ–Њ–є —Б–µ—В–Є –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—ЕARCCN
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В —В–Є–њ–Њ–≤—Л–µ —Б–µ—А–≤–Є—Б—Л —А–µ–≥–Є–Њ–љ–∞–ї—М–љ–Њ–є —Б–µ—В–Є –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—Е –Є –Є—Е –∞—А—Е–Є—В–µ–Ї—В—Г—А—Г, –≤–Ї–ї—О—З–∞—П —Г–њ—А–∞–≤–ї–µ–љ–Є–µ —В—А–∞—Д–Є–Ї–Њ–Љ, –Њ—В–Ї–∞–Ј–Њ—Г—Б—В–Њ–є—З–Є–≤–Њ—Б—В—М –Є –Љ–∞—А—И—А—Г—В–Є–Ј–∞—Ж–Є—О. –Ю–љ —В–∞–Ї–ґ–µ –Њ—Б–≤–µ—Й–∞–µ—В –і–µ—В–∞–ї–Є –Њ–±–µ—Б–њ–µ—З–µ–љ–Є—П –љ–∞–і–µ–ґ–љ–Њ–≥–Њ –і–Њ—Б—В—Г–њ–∞ –Ї –Є–љ—В–µ—А–љ–µ—В—Г –Є —Б–µ—А–≤–Є—Б–∞–Љ –і–ї—П –∞–±–Њ–љ–µ–љ—В–Њ–≤ —Б –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ–Љ —А–∞–Ј–ї–Є—З–љ—Л—Е —В–µ—Е–љ–Њ–ї–Њ–≥–Є–є –Є –Љ–Њ–і–µ–ї–µ–є. –Ю—Б–љ–Њ–≤–љ–Њ–µ –≤–љ–Є–Љ–∞–љ–Є–µ —Г–і–µ–ї—П–µ—В—Б—П —Г–њ—А–∞–≤–ї–µ–љ–Є—О —Б–µ—В—М—О —З–µ—А–µ–Ј –њ—А–Њ–Є–Ј–≤–Њ–ї—М–љ—Л–µ —В–Њ–њ–Њ–ї–Њ–≥–Є–Є –Є –њ–Њ–і–і–µ—А–ґ–Ї–µ –њ–Њ–ї–Є—В–Є–Ї –Ї–∞—З–µ—Б—В–≤–∞ –Њ–±—Б–ї—Г–ґ–Є–≤–∞–љ–Є—П.2016 –Ч–∞–±–µ–ї–Є–љ –Т—П—З–µ—Б–ї–∞–≤ –Р–љ–і—А–µ–µ–≤–Є—З –С–∞–Ї–∞–ї–∞–≤—А—Б–Ї–∞—П —А–∞–±–Њ—В–∞: –†–∞–Ј—А–∞–±–Њ—В–Ї–∞ –њ—А–Њ–≥—А–∞–Љ–Љ–љ—Л—Е —Б...
2016 –Ч–∞–±–µ–ї–Є–љ –Т—П—З–µ—Б–ї–∞–≤ –Р–љ–і—А–µ–µ–≤–Є—З –С–∞–Ї–∞–ї–∞–≤—А—Б–Ї–∞—П —А–∞–±–Њ—В–∞: –†–∞–Ј—А–∞–±–Њ—В–Ї–∞ –њ—А–Њ–≥—А–∞–Љ–Љ–љ—Л—Е —Б...RF-Lab
ћэ
–Т –≤—Л–њ—Г—Б–Ї–љ–Њ–є –Ї–≤–∞–ї–Є—Д–Є–Ї–∞—Ж–Є–Њ–љ–љ–Њ–є —А–∞–±–Њ—В–µ —А–∞—Б—Б–Љ–∞—В—А–Є–≤–∞–µ—В—Б—П —А–∞–Ј—А–∞–±–Њ—В–Ї–∞ –њ—А–Њ–≥—А–∞–Љ–Љ–љ—Л—Е —Б—А–µ–і—Б—В–≤ –і–ї—П –Њ–±–љ–∞—А—Г–ґ–µ–љ–Є—П –Є –∞–љ–∞–ї–Є–Ј–∞ —Б–Є–≥–љ–∞–ї–Њ–≤ —Б–Є—Б—В–µ–Љ —Б–њ—Г—В–љ–Є–Ї–Њ–≤–Њ–≥–Њ –њ–Њ–Ј–Є—Ж–Є–Њ–љ–Є—А–Њ–≤–∞–љ–Є—П GPS, –У–Ы–Ю–Э–Р–°–° –Є Beidou. –¶–µ–ї—М —А–∞–±–Њ—В—Л –Ј–∞–Ї–ї—О—З–∞–µ—В—Б—П –≤ —Б–Њ–Ј–і–∞–љ–Є–Є –∞–ї–≥–Њ—А–Є—В–Љ–∞, –њ–Њ–Ј–≤–Њ–ї—П—О—Й–µ–≥–Њ —Н—Д—Д–µ–Ї—В–Є–≤–љ–Њ –Њ–±–љ–∞—А—Г–ґ–Є–≤–∞—В—М —Б–Є–≥–љ–∞–ї—Л, —Б –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ–Љ –Љ–µ—В–Њ–і–∞ –±—Л—Б—В—А–Њ–≥–Њ –њ—А–µ–Њ–±—А–∞–Ј–Њ–≤–∞–љ–Є—П –§—Г—А—М–µ –і–ї—П —Б–љ–Є–ґ–µ–љ–Є—П –≤—Л—З–Є—Б–ї–Є—В–µ–ї—М–љ—Л—Е –Ј–∞—В—А–∞—В. –†–µ–Ј—Г–ї—М—В–∞—В—Л –Љ–Њ–і–µ–ї–Є—А–Њ–≤–∞–љ–Є—П –њ–Њ–і—В–≤–µ—А–і–Є–ї–Є —Г–љ–Є–≤–µ—А—Б–∞–ї—М–љ–Њ—Б—В—М —А–∞–Ј—А–∞–±–Њ—В–∞–љ–љ–Њ–є –њ—А–Њ—Ж–µ–і—Г—А—Л –≤ –Њ–±–љ–∞—А—Г–ґ–µ–љ–Є–Є —Б–Є–≥–љ–∞–ї–Њ–≤ –і–∞–љ–љ—Л—Е —Б–Є—Б—В–µ–Љ.10291
10291ivanov15666688
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В –њ–∞—В–µ–љ—В –љ–∞ –≤—Б–µ–љ–∞–њ—А–∞–≤–ї–µ–љ–љ—Г—О —Б–Є—Б—В–µ–Љ—Г —В—А–µ–≤–Њ–ґ–љ–Њ–є —Б–Є–≥–љ–∞–ї–Є–Ј–∞—Ж–Є–Є –і–ї—П —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —Б—А–µ–і—Б—В–≤, —Б–Њ–і–µ—А–ґ–∞—Й—Г—О –њ—А–Њ—Ж–µ—Б—Б–Њ—А, –Љ–Њ–і—Г–ї–Є —Б–Є–≥–љ–∞–ї–Є–Ј–∞—Ж–Є–Є –Њ–њ–∞—Б–љ–Њ—Б—В–Є –Є –љ–∞–њ—А–∞–≤–ї–µ–љ–Є—П –Њ–њ–∞—Б–љ–Њ—Б—В–Є, –∞ —В–∞–Ї–ґ–µ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—М–љ–Њ–µ —Г—Б—В—А–Њ–є—Б—В–≤–Њ –і–≤—Г—Б—В–Њ—А–Њ–љ–љ–µ–є —Б–≤—П–Ј–Є. –°–Є—Б—В–µ–Љ–∞ –њ—А–µ–і–љ–∞–Ј–љ–∞—З–µ–љ–∞ –і–ї—П –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П —Г—А–Њ–≤–љ—П –Њ–њ–∞—Б–љ–Њ—Б—В–Є –љ–∞ –Њ—Б–љ–Њ–≤–µ —Б–Є–≥–љ–∞–ї–Њ–≤ –Њ–±–љ–∞—А—Г–ґ–µ–љ–Є—П, —А–∞—Б—Б—В–Њ—П–љ–Є—П –і–Њ —Б–Њ—Б–µ–і–љ–Є—Е —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —Б—А–µ–і—Б—В–≤ –Є —Б–Њ—Б—В–Њ—П–љ–Є—П –≤–Њ–і–Є—В–µ–ї—П. –Ю—Б–љ–Њ–≤–љ–Њ–є —Ж–µ–ї—М—О —А–∞–Ј—А–∞–±–Њ—В–Ї–Є —П–≤–ї—П–µ—В—Б—П –њ–Њ–≤—Л—И–µ–љ–Є–µ –±–µ–Ј–Њ–њ–∞—Б–љ–Њ—Б—В–Є –і–Њ—А–Њ–ґ–љ–Њ–≥–Њ –і–≤–Є–ґ–µ–љ–Є—П —З–µ—А–µ–Ј –Љ–≥–љ–Њ–≤–µ–љ–љ–Њ–µ —Г–≤–µ–і–Њ–Љ–ї–µ–љ–Є–µ –≤–Њ–і–Є—В–µ–ї–µ–є –Њ–± –Њ–њ–∞—Б–љ–Њ—Б—В—П—Е.ANTOR MonitorMaster_buklet
ANTOR MonitorMaster_buklet–Р–љ–і—А–µ–є –Ъ—Г—З–µ—А–Њ–≤
ћэ
–°–Є—Б—В–µ–Љ–∞ antor monitormaster –Њ–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥ —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —Б—А–µ–і—Б—В–≤ –Є –Љ–Њ–±–Є–ї—М–љ—Л—Е –Њ–±—К–µ–Ї—В–Њ–≤, –њ–Њ–Ј–≤–Њ–ї—П—П –Ї–Њ–љ—В—А–Њ–ї–Є—А–Њ–≤–∞—В—М –Є—Е –Љ–µ—Б—В–Њ–њ–Њ–ї–Њ–ґ–µ–љ–Є–µ, –Љ–∞—А—И—А—Г—В—Л, —А–∞—Б—Е–Њ–і —В–Њ–њ–ї–Є–≤–∞ –Є —Б–Њ—Б—В–Њ—П–љ–Є–µ. –Т–Ї–ї—О—З–∞–µ—В —Б–њ–µ—Ж–Є–∞–ї–Є–Ј–Є—А–Њ–≤–∞–љ–љ—Л–µ —Г—Б—В—А–Њ–є—Б—В–≤–∞ –і–ї—П —Б–±–Њ—А–∞ –і–∞–љ–љ—Л—Е –Є –њ—А–µ–і–Њ—Б—В–∞–≤–ї—П–µ—В –∞–љ–∞–ї–Є—В–Є—З–µ—Б–Ї–Є–µ —Д—Г–љ–Ї—Ж–Є–Є –і–ї—П —Г–њ—А–∞–≤–ї–µ–љ–Є—П –ї–Њ–≥–Є—Б—В–Є–Ї–Њ–є –Є —Б–љ–Є–ґ–µ–љ–Є—О –Ј–∞—В—А–∞—В –љ–∞ —Н–Ї—Б–њ–ї—Г–∞—В–∞—Ж–Є—О. –Ш—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ —Б–Є—Б—В–µ–Љ—Л –њ–Њ–Ј–≤–Њ–ї—П–µ—В —Б–Њ–Ї—А–∞—В–Є—В—М —А–∞—Б—Е–Њ–і—Л –љ–∞ –У–°–Ь –Є —В–µ—Е–љ–Є—З–µ—Б–Ї–Њ–µ –Њ–±—Б–ї—Г–ґ–Є–≤–∞–љ–Є–µ, –∞ —В–∞–Ї–ґ–µ –њ–Њ–≤—Л—Б–Є—В—М –±–µ–Ј–Њ–њ–∞—Б–љ–Њ—Б—В—М –Є –і–Є—Б—Ж–Є–њ–ї–Є–љ—Г –≤–Њ–і–Є—В–µ–ї–µ–є.Rusnavgeoset LLC
Rusnavgeoset LLCdripfeeder
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В –њ—А–Њ–µ–Ї—В —Б–Њ–Ј–і–∞–љ–Є—П —Б–µ—В–Є –У–Ы–Ю–Э–Р–°–° —Б –њ–Њ–ї–љ—Л–Љ –љ–∞–±–Њ—А–Њ–Љ —Д—Г–љ–Ї—Ж–Є–є –і–ї—П —А–∞–Ј–ї–Є—З–љ—Л—Е —Б—Д–µ—А –њ—А–Є–Љ–µ–љ–µ–љ–Є—П, —В–∞–Ї–Є—Е –Ї–∞–Ї –Ј–µ–Љ–µ–ї—М–љ—Л–є –Ї–∞–і–∞—Б—В—А, –≥—А–∞–і–Њ—Б—В—А–Њ–Є—В–µ–ї—М—Б—В–≤–Њ –Є –і–Њ—А–Њ–ґ–љ–Њ–µ —Б—В—А–Њ–Є—В–µ–ї—М—Б—В–≤–Њ. –Ю–љ –њ–Њ–і—З–µ—А–Ї–Є–≤–∞–µ—В –≤–∞–ґ–љ–Њ—Б—В—М –љ–∞–і–µ–ґ–љ–Њ—Б—В–Є –Є –Њ–њ—В–Є–Љ–Є–Ј–∞—Ж–Є–Є —Б–µ—В–Є, –∞ —В–∞–Ї–ґ–µ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ –Њ–±–ї–∞—З–љ—Л—Е —В–µ—Е–љ–Њ–ї–Њ–≥–Є–є –і–ї—П —Е—А–∞–љ–µ–љ–Є—П –і–∞–љ–љ—Л—Е, —З—В–Њ –Њ–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В —Н–Ї–Њ–љ–Њ–Љ–Є—О –Є –≤—Л—Б–Њ–Ї—Г—О —Б—В–µ–њ–µ–љ—М –і–Њ—Б—В—Г–њ–љ–Њ—Б—В–Є. –Ґ–∞–Ї–ґ–µ –њ—А–µ–і—Б—В–∞–≤–ї–µ–љ—Л —В–µ—Е–љ–Є—З–µ—Б–Ї–Є–µ —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї–Є –Њ–±–Њ—А—Г–і–Њ–≤–∞–љ–Є—П –Є —Г—Б–ї–Њ–≤–Є—П –і–ї—П –њ–∞—А—В–љ–µ—А–Њ–≤ –Є –Њ–њ–µ—А–∞—В–Њ—А–Њ–≤, –≤–Ї–ї—О—З–∞—П –∞—Б–њ–µ–Ї—В—Л –Њ–Ї—Г–њ–∞–µ–Љ–Њ—Б—В–Є —Б–µ—В–Є.Gps online
Gps onlineMamed-13
ћэ
–Ъ–Њ–Љ–њ–∞–љ–Є—П '–°–∞—А—Д–∞—А–Њ–Ј' –њ—А–µ–і–ї–∞–≥–∞–µ—В —А–µ—И–µ–љ–Є—П –і–ї—П —Б–њ—Г—В–љ–Є–Ї–Њ–≤–Њ–≥–Њ –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥–∞ —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —Б—А–µ–і—Б—В–≤, –њ–Њ–Ј–≤–Њ–ї—П—О—Й–Є–µ –Ї–Њ–љ—В—А–Њ–ї–Є—А–Њ–≤–∞—В—М –Љ–µ—Б—В–Њ–њ–Њ–ї–Њ–ґ–µ–љ–Є–µ, —Б–Ї–Њ—А–Њ—Б—В—М –Є —А–∞—Б—Е–Њ–і —В–Њ–њ–ї–Є–≤–∞ —З–µ—А–µ–Ј –≤–µ–±-–Є–љ—В–µ—А—Д–µ–є—Б. –°–Є—Б—В–µ–Љ–∞ —Б–њ–Њ—Б–Њ–±—Б—В–≤—Г–µ—В —Б–љ–Є–ґ–µ–љ–Є—О —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —А–∞—Б—Е–Њ–і–Њ–≤ –Є –Њ–њ–µ—А–∞—В–Є–≤–љ–Њ–Љ—Г —Г–њ—А–∞–≤–ї–µ–љ–Є—О –∞–≤—В–Њ–њ–∞—А–Ї–Њ–Љ, –∞ —В–∞–Ї–ґ–µ –њ—А–µ–і–ї–∞–≥–∞–µ—В –Њ—В—З–µ—В–љ–Њ—Б—В—М –Є —В–µ—Е–љ–Є—З–µ—Б–Ї—Г—О –њ–Њ–і–і–µ—А–ґ–Ї—Г. –£—Б–ї—Г–≥–∞ –≤–Ї–ї—О—З–∞–µ—В –Ї—А—Г–≥–ї–Њ—Б—Г—В–Њ—З–љ—Л–є –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥, –∞–љ–∞–ї–Є–Ј –і–∞–љ–љ—Л—Е –Є –≥–Є–±–Ї–Є–µ –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є –Њ—В—З–µ—В–љ–Њ—Б—В–Є –Њ —А–∞–±–Њ—В–µ —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —Б—А–µ–і—Б—В–≤.Gps online
Gps onlineGPS-online
ћэ
–Ъ–Њ–Љ–њ–∞–љ–Є—П '–°–∞—А—Д–∞—А–Њ–Ј' –њ—А–µ–і–ї–∞–≥–∞–µ—В —А–µ—И–µ–љ–Є—П –і–ї—П —Б–њ—Г—В–љ–Є–Ї–Њ–≤–Њ–≥–Њ –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥–∞ —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —Б—А–µ–і—Б—В–≤, –≤–Ї–ї—О—З–∞—П GPS/GSM —В—А–µ–Ї–µ—А—Л, –Ї–Њ—В–Њ—А—Л–µ –њ–Њ–Ј–≤–Њ–ї—П—О—В –Ї–Њ–љ—В—А–Њ–ї–Є—А–Њ–≤–∞—В—М –Љ–µ—Б—В–Њ–њ–Њ–ї–Њ–ґ–µ–љ–Є–µ, —Б–Ї–Њ—А–Њ—Б—В—М –Є —А–∞—Б—Е–Њ–і —В–Њ–њ–ї–Є–≤–∞. –°–Є—Б—В–µ–Љ–∞ –Њ–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В –Ї—А—Г–≥–ї–Њ—Б—Г—В–Њ—З–љ—Л–є –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥ —З–µ—А–µ–Ј –≤–µ–±-–Є–љ—В–µ—А—Д–µ–є—Б, —Б–љ–Є–ґ–∞—П —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л–µ —А–∞—Б—Е–Њ–і—Л –Є –њ–Њ–≤—Л—И–∞—П –Њ–њ–µ—А–∞—В–Є–≤–љ–Њ—Б—В—М —А–µ–∞–≥–Є—А–Њ–≤–∞–љ–Є—П –љ–∞ –љ–µ—И—В–∞—В–љ—Л–µ —Б–Є—В—Г–∞—Ж–Є–Є. –£—Б–ї—Г–≥–Є –≤–Ї–ї—О—З–∞—О—В —В–µ—Е–љ–Є—З–µ—Б–Ї—Г—О –њ–Њ–і–і–µ—А–ґ–Ї—Г, –Њ—В—З–µ—В–љ–Њ—Б—В—М –Є –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В—М –љ–∞—Б—В—А–Њ–є–Ї–Є —Д—Г–љ–Ї—Ж–Є–Њ–љ–∞–ї—М–љ–Њ—Б—В–Є —Б–Є—Б—В–µ–Љ—Л.–°–Ї–Њ—А–њ–Є–Њ–љ –Ь
–°–Ї–Њ—А–њ–Є–Њ–љ –ЬNTCRTS
ћэ
–Ь–Њ–±–Є–ї—М–љ–∞—П —Б—В–∞–љ—Ж–Є—П —А–∞–і–Є–Њ–Ї–Њ–љ—В—А–Њ–ї—П VHF-UHF ¬Ђ–°–Ї–Њ—А–њ–Є–Њ–љ-–Ь¬ї –њ—А–µ–і–љ–∞–Ј–љ–∞—З–µ–љ–∞ –і–ї—П –Њ–±–љ–∞—А—Г–ґ–µ–љ–Є—П, –њ–µ–ї–µ–љ–≥–Њ–≤–∞–љ–Є—П –Є —А–µ–≥–Є—Б—В—А–∞—Ж–Є–Є —Б–Є–≥–љ–∞–ї–Њ–≤ –≤ –і–Є–∞–њ–∞–Ј–Њ–љ–µ —З–∞—Б—В–Њ—В 25-3000 –Ь–У—Ж. –Ю–љ–∞ –Њ–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В –њ–∞–љ–Њ—А–∞–Љ–љ—Л–є –Њ–±–Ј–Њ—А, –∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–Њ–µ –Њ–±–љ–∞—А—Г–ґ–µ–љ–Є–µ –Є—Б—В–Њ—З–љ–Є–Ї–Њ–≤ —А–∞–і–Є–Њ–Є–Ј–ї—Г—З–µ–љ–Є—П –Є –≤–Ј–∞–Є–Љ–Њ–і–µ–є—Б—В–≤–Є–µ –≤ –њ–µ–ї–µ–љ–≥–∞—В–Њ—А–љ–Њ–є —Б–µ—В–Є, –∞ —В–∞–Ї–ґ–µ —А–∞–Ј–Љ–µ—Й–∞–µ—В—Б—П –љ–∞ –∞–≤—В–Њ–Љ–Њ–±–Є–ї–µ –Є —А–∞–±–Њ—В–∞–µ—В –≤ —А–µ–ґ–Є–Љ–µ –∞–≤—В–Њ–љ–Њ–Љ–љ–Њ–≥–Њ –Є —Б—В–∞—Ж–Є–Њ–љ–∞—А–љ–Њ–≥–Њ –њ–Є—В–∞–љ–Є—П. –Ю–±–Њ—А—Г–і–Њ–≤–∞–љ–Є–µ –≤–Ї–ї—О—З–∞–µ—В –≤—Л—Б–Њ–Ї–Њ—Б–Ї–Њ—А–Њ—Б—В–љ—Л–µ –њ–µ–ї–µ–љ–≥–∞—В–Њ—А—Л, GPS-–љ–∞–≤–Є–≥–∞—В–Њ—А—Л –Є –Ї–Њ–Љ–њ—М—О—В–µ—А –і–ї—П –Њ–±—А–∞–±–Њ—В–Ї–Є –і–∞–љ–љ—Л—Е, –і–Њ—Б—В—Г–њ–љ—Л–µ –і–ї—П —А–∞–Ј–ї–Є—З–љ—Л—Е –Ї–Њ–љ—Д–Є–≥—Г—А–∞—Ж–Є–є –≤ –Ј–∞–≤–Є—Б–Є–Љ–Њ—Б—В–Є –Њ—В —В—А–µ–±–Њ–≤–∞–љ–Є–є –Ј–∞–Ї–∞–Ј—З–Є–Ї–∞.–≠–Ї–Ј–∞–Љ–µ–љ–∞—Ж–Є–Њ–љ–љ—Л–µ –≤–Њ–њ—А–Њ—Б—Л –Є—В 4 –Ї—Г—А—Б 2011 –≥–Њ–і
–≠–Ї–Ј–∞–Љ–µ–љ–∞—Ж–Є–Њ–љ–љ—Л–µ –≤–Њ–њ—А–Њ—Б—Л –Є—В 4 –Ї—Г—А—Б 2011 –≥–Њ–і–Р–ї–µ–Ї—Б–µ–є –С–Њ—А–Њ–≤—Б–Ї–Њ–є
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В —Б–Њ–і–µ—А–ґ–Є—В —Н–Ї–Ј–∞–Љ–µ–љ–∞—Ж–Є–Њ–љ–љ—Л–µ –≤–Њ–њ—А–Њ—Б—Л –њ–Њ –і–Є—Б—Ж–Є–њ–ї–Є–љ–µ '–Є–љ—Д–Њ—А–Љ–∞—Ж–Є–Њ–љ–љ—Л–µ —В–µ—Е–љ–Њ–ї–Њ–≥–Є–Є –љ–∞ —В—А–∞–љ—Б–њ–Њ—А—В–µ', –Њ—Е–≤–∞—В—Л–≤–∞—О—Й–Є–µ —В–µ–Љ—Л –ї–Њ–Ї–∞–ї—М–љ—Л—Е –Ї–Њ–Љ–њ—М—О—В–µ—А–љ—Л—Е —Б–µ—В–µ–є, –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—Е –Є –≥–Њ–ї–Њ—Б–Њ–≤—Л—Е —Б–Њ–Њ–±—Й–µ–љ–Є–є, –Њ–±–µ—Б–њ–µ—З–µ–љ–Є—П –Є–љ—Д–Њ—А–Љ–∞—Ж–Є–Њ–љ–љ–Њ–є –±–µ–Ј–Њ–њ–∞—Б–љ–Њ—Б—В–Є –Є –∞–≤—В–Њ–Љ–∞—В–Є–Ј–Є—А–Њ–≤–∞–љ–љ—Л—Е —Б–Є—Б—В–µ–Љ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –і–Њ—А–Њ–ґ–љ—Л–Љ –і–≤–Є–ґ–µ–љ–Є–µ–Љ. –Ъ–∞–ґ–і–∞—П —В–µ–Љ–∞ –і–µ—В–∞–ї–Є–Ј–Є—А—Г–µ—В—Б—П —З–µ—А–µ–Ј –Ї–ї—О—З–µ–≤—Л–µ —В–µ—А–Љ–Є–љ—Л, –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П –Є –Њ–±—Б—Г–ґ–і–µ–љ–Є–µ —В–µ—Е–љ–Њ–ї–Њ–≥–Є–є, —В–∞–Ї–Є—Е –Ї–∞–Ї —Б–Є–≥–љ–∞–ї—Л, –±–∞–Ј—Л –і–∞–љ–љ—Л—Е –Є —Б–Є—Б—В–µ–Љ—Л —Б–њ—Г—В–љ–Є–Ї–Њ–≤–Њ–є –љ–∞–≤–Є–≥–∞—Ж–Є–Є. –Ю—Б–љ–Њ–≤–љ–Њ–µ –≤–љ–Є–Љ–∞–љ–Є–µ —Г–і–µ–ї—П–µ—В—Б—П –Ї–Њ–љ—Ж–µ–њ—Ж–Є—П–Љ, –Є—Е –і–Њ—Б—В–Њ–Є–љ—Б—В–≤–∞–Љ –Є –љ–µ–і–Њ—Б—В–∞—В–Ї–∞–Љ, –∞ —В–∞–Ї–ґ–µ —Б—В–∞–љ–і–∞—А—В–∞–Љ –Є –Ї–ї–∞—Б—Б–Є—Д–Є–Ї–∞—Ж–Є—П–Љ.–†–£–Ъ–Ю–Т–Ю–Ф–°–Ґ–Т–Ю –Я–Ю –Я–†–Ю–У–Э–Ю–Ч–Ш–†–Ю–Т–Р–Э–Ш–Ѓ –Ш–Э–Ґ–Х–Э–°–Ш–Т–Э–Ю–°–Ґ–Ш –Ф–Т–Ш–Ц–Х–Э–Ш–ѓ –Э–Р –Р–Т–Ґ–Ю–Ь–Ю–С–Ш–Ы–ђ–Э–Ђ–• –Ф–Ю–†–Ю–У–Р–•
–†–£–Ъ–Ю–Т–Ю–Ф–°–Ґ–Т–Ю –Я–Ю –Я–†–Ю–У–Э–Ю–Ч–Ш–†–Ю–Т–Р–Э–Ш–Ѓ –Ш–Э–Ґ–Х–Э–°–Ш–Т–Э–Ю–°–Ґ–Ш –Ф–Т–Ш–Ц–Х–Э–Ш–ѓ –Э–Р –Р–Т–Ґ–Ю–Ь–Ю–С–Ш–Ы–ђ–Э–Ђ–• –Ф–Ю–†–Ю–У–Р–•–Р–ї–µ–Ї—Б–µ–є –С–Њ—А–Њ–≤—Б–Ї–Њ–є
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В —П–≤–ї—П–µ—В—Б—П –Љ–µ—В–Њ–і–Є—З–µ—Б–Ї–Є–Љ —А—Г–Ї–Њ–≤–Њ–і—Б—В–≤–Њ–Љ –њ–Њ –њ—А–Њ–≥–љ–Њ–Ј–Є—А–Њ–≤–∞–љ–Є—О –Є–љ—В–µ–љ—Б–Є–≤–љ–Њ—Б—В–Є –і–≤–Є–ґ–µ–љ–Є—П –љ–∞ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—М–љ—Л—Е –і–Њ—А–Њ–≥–∞—Е, —Г—В–≤–µ—А–ґ–і–µ–љ–љ—Л–Љ –Ь–Є–љ–Є—Б—В–µ—А—Б—В–≤–Њ–Љ —В—А–∞–љ—Б–њ–Њ—А—В–∞ –†–Њ—Б—Б–Є–є—Б–Ї–Њ–є –§–µ–і–µ—А–∞—Ж–Є–Є. –Ю–љ –Њ—Е–≤–∞—В—Л–≤–∞–µ—В —А–∞—Б—З–µ—В—Л —Б—А–µ–і–љ–µ–≥–Њ–і–Њ–≤–Њ–є —Б—Г—В–Њ—З–љ–Њ–є –Є–љ—В–µ–љ—Б–Є–≤–љ–Њ—Б—В–Є –і–≤–Є–ґ–µ–љ–Є—П –∞–≤—В–Њ—В—А–∞–љ—Б–њ–Њ—А—В–∞ –Ї–∞–Ї –љ–∞ —Д–µ–і–µ—А–∞–ї—М–љ—Л—Е, —В–∞–Ї –Є –љ–∞ –≥–Њ—А–Њ–і—Б–Ї–Є—Е –і–Њ—А–Њ–≥–∞—Е, —Г—З–Є—В—Л–≤–∞—П —З–Є—Б–ї–µ–љ–љ–Њ—Б—В—М –љ–∞—Б–µ–ї–µ–љ–Є—П –Є –∞–і–Љ–Є–љ–Є—Б—В—А–∞—В–Є–≤–љ—Г—О –Ј–љ–∞—З–Є–Љ–Њ—Б—В—М –љ–∞—Б–µ–ї–µ–љ–љ—Л—Е –њ—Г–љ–Ї—В–Њ–≤. –Ь–µ—В–Њ–і–Є–Ї–∞ –≤–Ї–ї—О—З–∞–µ—В —А–µ–Ї–Њ–Љ–µ–љ–і–∞—Ж–Є–Є –њ–Њ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є—О –і–ї—П –њ–ї–∞–љ–Є—А–Њ–≤–∞–љ–Є—П –і–Њ—А–Њ–ґ–љ—Л—Е —А–∞–±–Њ—В –Є —А–∞–Ј—А–∞–±–Њ—В–Ї–Є –њ—А–Њ–≥—А–∞–Љ–Љ —А–∞–Ј–≤–Є—В–Є—П —В—А–∞–љ—Б–њ–Њ—А—В–љ–Њ–є –Є–љ—Д—А–∞—Б—В—А—Г–Ї—В—Г—А—Л.More Related Content
Similar to –Я—А–µ–Ј–µ–љ—В–∞—Ж–Є—П –њ–Њ –і–µ—В–µ–Ї—В–Њ—А–∞–Љ —В—А–∞–љ—Б–њ–Њ—А—В–∞ (20)
–†–µ—И–µ–љ–Є—П Cisco –і–ї—П –Њ–њ—В–Є—З–µ—Б–Ї–Њ–≥–Њ —В—А–∞–љ—Б–њ–Њ—А—В–∞
–†–µ—И–µ–љ–Є—П Cisco –і–ї—П –Њ–њ—В–Є—З–µ—Б–Ї–Њ–≥–Њ —В—А–∞–љ—Б–њ–Њ—А—В–∞Cisco Russia
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –њ—А–µ–і—Б—В–∞–≤–ї—П–µ—В –Њ–±–Ј–Њ—А —Б–Њ–≤—А–µ–Љ–µ–љ–љ—Л—Е —А–µ—И–µ–љ–Є–є Cisco –і–ї—П –Њ–њ—В–Є—З–µ—Б–Ї–Њ–≥–Њ —В—А–∞–љ—Б–њ–Њ—А—В–∞, –≤–Ї–ї—О—З–∞—П –∞–љ–∞–ї–Є–Ј –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ—Б—В–µ–є –Є–Ј–Љ–µ–љ–µ–љ–Є—П —В–µ—Е–љ–Њ–ї–Њ–≥–Є–є –≤ —Г—Б–ї–Њ–≤–Є—П—Е —А–Њ—Б—В–∞ —В—А–∞—Д–Є–Ї–∞ –Є –Ј–∞–≤–µ—А—И–µ–љ–Є—П –ґ–Є–Ј–љ–µ–љ–љ–Њ–≥–Њ —Ж–Є–Ї–ї–∞ —В–∞–Ї–Є—Е —Б—В–∞–љ–і–∞—А—В–Њ–≤, –Ї–∞–Ї SONET/SDH. –Ю—Б–љ–Њ–≤–љ–Њ–µ –≤–љ–Є–Љ–∞–љ–Є–µ —Г–і–µ–ї—П–µ—В—Б—П –љ–Њ–≤—Л–Љ –∞—А—Е–Є—В–µ–Ї—В—Г—А–љ—Л–Љ —А–µ—И–µ–љ–Є—П–Љ –Є –Њ–њ—В–Є—З–µ—Б–Ї–Є–Љ –Љ–Њ–і—Г–ї—П–Љ, –≤–Ї–ї—О—З–∞—П –≥–Є–±–Ї–Є–µ —Б–њ–µ–Ї—В—А—Л, —Б—Г–њ–µ—А-–Ї–∞–љ–∞–ї—Л –Є —А–∞–Ј–≤–Є—В–Є–µ SDN –і–ї—П –њ–Њ–≤—Л—И–µ–љ–Є—П –љ–∞–і–µ–ґ–љ–Њ—Б—В–Є –Є –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї—М–љ–Њ—Б—В–Є —Б–µ—В–µ–є. –Ґ–∞–Ї–ґ–µ —А–∞—Б—Б–Љ–∞—В—А–Є–≤–∞—О—В—Б—П –њ—А–µ–Є–Љ—Г—Й–µ—Б—В–≤–∞ –Љ–Њ–і—Г–ї—М–љ–Њ–є –∞—А—Е–Є—В–µ–Ї—В—Г—А—Л –Є –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є –љ–∞—А–∞—Й–Є–≤–∞–љ–Є—П –µ–Љ–Ї–Њ—Б—В–Є.2010 Gucaluk diplom presentation
2010 Gucaluk diplom presentationRF-Lab
ћэ
–Ф–Є–њ–ї–Њ–Љ–љ—Л–є –њ—А–Њ–µ–Ї—В –љ–∞ —В–µ–Љ—Г —А–∞–Ј—А–∞–±–Њ—В–Ї–Є –њ—А–Њ–≥—А–∞–Љ–Љ–љ—Л—Е —Б—А–µ–і—Б—В–≤ –і–ї—П –Љ–Њ–і–µ–ї–Є—А–Њ–≤–∞–љ–Є—П —Б–Є–≥–љ–∞–ї–Њ–≤ —Б–Є—Б—В–µ–Љ—Л —Б–њ—Г—В–љ–Є–Ї–Њ–≤–Њ–≥–Њ –њ–Њ–Ј–Є—Ж–Є–Њ–љ–Є—А–Њ–≤–∞–љ–Є—П –≤–Ї–ї—О—З–∞–µ—В –Њ–±–Ј–Њ—А –∞–љ–∞–ї–Њ–≥–Є—З–љ—Л—Е —А–µ—И–µ–љ–Є–є, –∞–љ–∞–ї–Є–Ј –њ—А–Є–љ—Ж–Є–њ–Њ–≤ –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П –Ї–Њ–Њ—А–і–Є–љ–∞—В –Є –≥–µ–љ–µ—А–Є—А–Њ–≤–∞–љ–Є—П –љ–∞–≤–Є–≥–∞—Ж–Є–Њ–љ–љ–Њ–≥–Њ —Б–Є–≥–љ–∞–ї–∞. –Т –њ—А–Њ–µ–Ї—В–µ —А–∞—Б—Б–Љ–∞—В—А–Є–≤–∞—О—В—Б—П –љ–µ–≥–∞—В–Є–≤–љ—Л–µ —Д–∞–Ї—В–Њ—А—Л, –≤–ї–Є—П—О—Й–Є–µ –љ–∞ –њ–µ—А–µ–і–∞—З—Г —Б–Є–≥–љ–∞–ї–∞, –∞ —В–∞–Ї–ґ–µ —А–∞–Ј—А–∞–±–Њ—В–Ї–∞ –Љ–Њ–і–µ–ї–Є –Ї–∞–љ–∞–ї–∞, –њ–Њ–Ј–≤–Њ–ї—П—О—Й–µ–є —Б–Љ–Њ–і–µ–ї–Є—А–Њ–≤–∞—В—М —А–µ–∞–ї—М–љ—Л–µ —Г—Б–ї–Њ–≤–Є—П. –Т –Є—В–Њ–≥–µ —Б–Њ–Ј–і–∞–љ–Њ –њ—А–Њ–≥—А–∞–Љ–Љ–љ–Њ–µ –Њ–±–µ—Б–њ–µ—З–µ–љ–Є–µ –і–ї—П –≥–µ–љ–µ—А–∞—Ж–Є–Є –≤—Л—Е–Њ–і–љ–Њ–≥–Њ —Б–Є–≥–љ–∞–ї–∞, —Б–Њ–Њ—В–≤–µ—В—Б—В–≤—Г—О—Й–µ–≥–Њ —А–∞–Ј—А–∞–±–Њ—В–∞–љ–љ–Њ–є –Љ–Њ–і–µ–ї–Є.Vladimir klimov
Vladimir klimovjournalrubezh
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В —А–∞–Ј–≤–Є—В–Є–µ –Є —Б–Њ–≤—А–µ–Љ–µ–љ–љ–Њ–µ —Б–Њ—Б—В–Њ—П–љ–Є–µ —Б–Є—Б—В–µ–Љ—Л –У–Ы–Ю–Э–Р–°–°, –≤–Ї–ї—О—З–∞—П –Њ—Б–љ–Њ–≤–љ—Л–µ –Ј–∞–і–∞—З–Є –њ—А–Њ–≥—А–∞–Љ–Љ—Л, —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї—Г –Ї–Њ—Б–Љ–Є—З–µ—Б–Ї–Є—Е –∞–њ–њ–∞—А–∞—В–Њ–≤ –Є –њ–ї–∞–љ—Л –њ–Њ –Ј–∞–њ—Г—Б–Ї—Г –љ–Њ–≤—Л—Е —Б–њ—Г—В–љ–Є–Ї–Њ–≤ –і–Њ 2020 –≥–Њ–і–∞. –Ю—Б–љ–Њ–≤–љ–Њ–µ –≤–љ–Є–Љ–∞–љ–Є–µ —Г–і–µ–ї—П–µ—В—Б—П —Г–ї—Г—З—И–µ–љ–Є—О –Ї–∞—З–µ—Б—В–≤–∞ –љ–∞–≤–Є–≥–∞—Ж–Є–Њ–љ–љ—Л—Е —Г—Б–ї—Г–≥, –Є–љ—В–µ–≥—А–∞—Ж–Є–Є —Б –Љ–µ–ґ–і—Г–љ–∞—А–Њ–і–љ—Л–Љ–Є —Б–Є—Б—В–µ–Љ–∞–Љ–Є –Є —А–∞–Ј—А–∞–±–Њ—В–Ї–µ –љ–Њ–≤—Л—Е —В–µ—Е–љ–Њ–ї–Њ–≥–Є–є. –Ґ–∞–Ї–ґ–µ –Њ–±—Б—Г–ґ–і–∞—О—В—Б—П –Љ–µ–ґ–і—Г–љ–∞—А–Њ–і–љ–Њ–µ —Б–Њ—В—А—Г–і–љ–Є—З–µ—Б—В–≤–Њ –Є –њ–ї–∞–љ—Л –њ–Њ —Б–Њ–Ј–і–∞–љ–Є—О —Б–Њ–≤–Љ–µ—Б—В–љ–Њ–≥–Њ –Є–љ–љ–Њ–≤–∞—Ж–Є–Њ–љ–љ–Њ–≥–Њ —Ж–µ–љ—В—А–∞ —Б –Ъ–Є—В–∞–µ–Љ.–Я—А–µ–Ј–µ–љ—В–∞—Ж–Є—П –Ю–Ю–Ю "–Р–°–Т-–Ґ–µ—Е–љ–Є–Ї—Б"
–Я—А–µ–Ј–µ–љ—В–∞—Ж–Є—П –Ю–Ю–Ю "–Р–°–Т-–Ґ–µ—Е–љ–Є–Ї—Б"kulibin
ћэ
–§–Є—А–Љ–∞ '–Р–°–Т-–Ґ–µ—Е–љ–Є–Ї—Б' –Њ—Б–љ–Њ–≤–∞–љ–∞ –≤ 1998 –≥–Њ–і—Г –≤ –Ю–±–љ–Є–љ—Б–Ї–µ –Є –Ј–∞–љ–Є–Љ–∞–µ—В—Б—П —А–∞–Ј—А–∞–±–Њ—В–Ї–Њ–є –Є –њ—А–Њ–Є–Ј–≤–Њ–і—Б—В–≤–Њ–Љ —Б–Є—Б—В–µ–Љ –≤–Є–і–µ–Њ–љ–∞–±–ї—О–і–µ–љ–Є—П —Б —И–Є—А–Њ–Ї–Є–Љ —Б–њ–µ–Ї—В—А–Њ–Љ —Д—Г–љ–Ї—Ж–Є–Њ–љ–∞–ї–∞. –°—А–µ–і–Є –њ—А–Њ–і—Г–Ї—Ж–Є–Є - –∞–≤—В–Њ–Љ–Њ–±–Є–ї—М–љ—Л–µ –≤–Є–і–µ–Њ—А–µ–≥–Є—Б—В—А–∞—В–Њ—А—Л, —Б—В–∞—Ж–Є–Њ–љ–∞—А–љ—Л–µ —Г—Б—В—А–Њ–є—Б—В–≤–∞ –Є —Б–Є—Б—В–µ–Љ—Л –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥–∞, –Ї–Њ—В–Њ—А—Л–µ —Б–µ—А—В–Є—Д–Є—Ж–Є—А–Њ–≤–∞–љ—Л –Є –Є–Љ–µ—О—В –њ–∞—В–µ–љ—В—Л. –Ъ–Њ–Љ–њ–∞–љ–Є—П –њ—А–µ–і–ї–∞–≥–∞–µ—В –Ї–∞—З–µ—Б—В–≤–µ–љ–љ–Њ–µ –Њ–±—Б–ї—Г–ґ–Є–≤–∞–љ–Є–µ, –Є–љ–і–Є–≤–Є–і—Г–∞–ї—М–љ—Л–µ —А–µ—И–µ–љ–Є—П –і–ї—П –Ї–ї–Є–µ–љ—В–Њ–≤ –Є –∞–Ї—В–Є–≤–љ–Њ–µ —Б–Њ—В—А—Г–і–љ–Є—З–µ—Б—В–≤–Њ —Б –њ–∞—А—В–љ–µ—А–∞–Љ–Є –њ–Њ –≤—Б–µ–є –†–Њ—Б—Б–Є–Є.–Ґ–∞—Е–Њ–≥—А–∞—Д VR2400
–Ґ–∞—Е–Њ–≥—А–∞—Д VR2400–°–≤—Ц—В–∞—Е–Њ
ћэ
–Ґ–∞—Е–Њ–≥—А–∞—Д v 24 0 r 0 —П–≤–ї—П–µ—В—Б—П —Г–љ–Є–≤–µ—А—Б–∞–ї—М–љ—Л–Љ —Г—Б—В—А–Њ–є—Б—В–≤–Њ–Љ, —Б–Њ–≤–Љ–µ—Б—В–Є–Љ—Л–Љ —Б –±–Њ–ї—М—И–Є–љ—Б—В–≤–Њ–Љ —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —Б—А–µ–і—Б—В–≤, –≤–Ї–ї—О—З–∞—П –∞–≤—В–Њ–Љ–Њ–±–Є–ї–Є —Б–Њ–≤–µ—В—Б–Ї–Њ–≥–Њ –њ—А–Њ–Є–Ј–≤–Њ–і—Б—В–≤–∞. –Ю–љ –Є–Љ–µ–µ—В —А–∞–Ј–ї–Є—З–љ—Л–µ —А–µ–ґ–Є–Љ—Л —А–∞–±–Њ—В—Л –Є —В–µ—Е–љ–Є—З–µ—Б–Ї–Є–µ —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї–Є, —Г–і–Њ–≤–ї–µ—В–≤–Њ—А—П—О—Й–Є–µ —Б—В–∞–љ–і–∞—А—В–∞–Љ –Х–° 95/54/EC, –∞ —В–∞–Ї–ґ–µ —Б–њ–Њ—Б–Њ–±–µ–љ —А–µ–≥–Є—Б—В—А–Є—А–Њ–≤–∞—В—М –і–∞–љ–љ—Л–µ –Њ —Б–Ї–Њ—А–Њ—Б—В–Є, —А–∞—Б—Б—В–Њ—П–љ–Є–Є –Є –≤—А–µ–Љ–µ–љ–Є. –£—Б—В—А–Њ–є—Б—В–≤–Њ —В–∞–Ї–ґ–µ –Њ–±–ї–∞–і–∞–µ—В –Ї–Њ–Љ–њ–∞–Ї—В–љ—Л–Љ–Є —А–∞–Ј–Љ–µ—А–∞–Љ–Є –Є –Љ–Њ–ґ–µ—В –±—Л—В—М —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ–Њ –≤ –њ–∞–љ–µ–ї—М –њ—А–Є–±–Њ—А–Њ–≤.–Ю–±–Ј–Њ—А –Є –љ–Њ–≤—Л–µ –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є –∞—А—Е–Є—В–µ–Ї—В—Г—А—Л CisconLight. –Я–ї–∞—В—Д–Њ—А–Љ–∞ NCS 2000
–Ю–±–Ј–Њ—А –Є –љ–Њ–≤—Л–µ –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є –∞—А—Е–Є—В–µ–Ї—В—Г—А—Л CisconLight. –Я–ї–∞—В—Д–Њ—А–Љ–∞ NCS 2000Cisco Russia
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –њ—А–µ–і—Б—В–∞–≤–ї—П–µ—В —Б–Њ–±–Њ–є –Њ–±–Ј–Њ—А –∞—А—Е–Є—В–µ–Ї—В—Г—А—Л Cisco nLight –Є –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–µ–є –њ–ї–∞—В—Д–Њ—А–Љ—Л NCS 2000, –њ–Њ–і—З–µ—А–Ї–љ—Г–≤ –≤–∞–ґ–љ–Њ—Б—В—М –Ї–Њ–љ–≤–µ—А–≥–µ–љ—Ж–Є–Є, –≥–Є–±–Ї–Њ—Б—В–Є –Є –Љ–∞—Б—И—В–∞–±–Є—А—Г–µ–Љ–Њ—Б—В–Є –≤ —Б–Њ–≤—А–µ–Љ–µ–љ–љ—Л—Е —Б–µ—В—П—Е. –Т –љ–µ–Љ –Њ–њ–Є—Б–∞–љ—Л –Ї–ї—О—З–µ–≤—Л–µ –Ї–Њ–Љ–њ–Њ–љ–µ–љ—В—Л, —В–∞–Ї–Є–µ –Ї–∞–Ї –≤—Л—Б–Њ–Ї–Њ—Б–Ї–Њ—А–Њ—Б—В–љ—Л–µ —В—А–∞–љ—Б–њ–Њ–љ–і–µ—А—Л –Є —А–∞–Ј–ї–Є—З–љ—Л–µ –Љ–Њ–і—Г–ї–Є, –∞ —В–∞–Ї–ґ–µ –≤–љ–µ–і—А–µ–љ–Є–µ –њ—А–Њ–≥—А–∞–Љ–Љ–љ–Њ —Г–њ—А–∞–≤–ї—П–µ–Љ—Л—Е —А–µ—И–µ–љ–Є–є –і–ї—П –Њ–њ—В–Є–Љ–Є–Ј–∞—Ж–Є–Є —Б–µ—В–µ–≤–Њ–є –Є–љ—Д—А–∞—Б—В—А—Г–Ї—В—Г—А—Л. –Т—Л–і–µ–ї—П—О—В—Б—П –њ—А–µ–Є–Љ—Г—Й–µ—Б—В–≤–∞, —В–∞–Ї–Є–µ –Ї–∞–Ї —Б–љ–Є–ґ–µ–љ–Є–µ –Ї–∞–њ–Є—В–∞–ї—М–љ—Л—Е –Є –Њ–њ–µ—А–∞—Ж–Є–Њ–љ–љ—Л—Е –Ј–∞—В—А–∞—В, –∞ —В–∞–Ї–ґ–µ –∞–і–∞–њ—В–∞—Ж–Є—П –Ї —В—А–µ–±–Њ–≤–∞–љ–Є—П–Љ —А—Л–љ–Ї–∞.–Э–∞—И–Є —А–∞–Ј—А–∞–±–Њ—В–Ї–Є.
–Э–∞—И–Є —А–∞–Ј—А–∞–±–Њ—В–Ї–Є.Shelena-weres
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В —Б–Њ–і–µ—А–ґ–Є—В —В–µ—Е–љ–Є—З–µ—Б–Ї–Є–µ —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї–Є —А–∞–Ј–ї–Є—З–љ—Л—Е –≥–Є–і—А–Њ–∞–Ї—Г—Б—В–Є—З–µ—Б–Ї–Є—Е —Г—Б—В—А–Њ–є—Б—В–≤ –Є —Б–Є—Б—В–µ–Љ —Б–≤—П–Ј–Є, –≤–Ї–ї—О—З–∞—П –њ–Њ–Ї–∞–Ј–∞—В–µ–ї–Є –Є—Е –і–∞–ї—М–љ–Њ—Б—В–Є, —В–Њ—З–љ–Њ—Б—В–Є –Є —Б—А–Њ–Ї–Њ–≤ —Б–ї—Г–ґ–±—Л. –Ю—Б–љ–Њ–≤–љ—Л–µ —Н–ї–µ–Љ–µ–љ—В—Л –≤–Ї–ї—О—З–∞—О—В –њ—Г–ї—М—В —Г–њ—А–∞–≤–ї–µ–љ–Є—П, –∞–љ—В–µ–љ–љ—Л –Є –љ–∞–±–Њ—А —Г—Б—В—А–Њ–є—Б—В–≤ –і–ї—П —Б–≤—П–Ј–Є –љ–∞ —А–∞–Ј–ї–Є—З–љ—Л—Е —З–∞—Б—В–Њ—В–∞—Е. –Ґ–∞–Ї–ґ–µ –Њ–њ–Є—Б–∞–љ—Л –њ–∞—А–∞–Љ–µ—В—А—Л —А–∞–±–Њ—В—Л –≤ —А–∞–Ј–ї–Є—З–љ—Л—Е —А–µ–ґ–Є–Љ–∞—Е –Є –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є –і–∞–љ–љ–Њ–є –∞–њ–њ–∞—А–∞—В—Г—А—Л.–њ—А–µ–Ј–µ–љ—В–∞—Ж–Є—П 2
–њ—А–µ–Ј–µ–љ—В–∞—Ж–Є—П 2InterExpo Geo-siberia
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–±—Б—Г–ґ–і–∞–µ—В –њ—А–Є–Љ–µ–љ–µ–љ–Є–µ –Љ–µ—В–Њ–і–∞ —В–Њ—З–љ–Њ–≥–Њ —В–Њ—З–µ—З–љ–Њ–≥–Њ –њ–Њ–Ј–Є—Ж–Є–Њ–љ–Є—А–Њ–≤–∞–љ–Є—П (PPP) –і–ї—П –≥–µ–Њ–і–µ–Ј–Є—З–µ—Б–Ї–Њ–≥–Њ –Њ–±–µ—Б–њ–µ—З–µ–љ–Є—П –∞—Н—А–Њ—Н–ї–µ–Ї—В—А–Њ—А–∞–Ј–≤–µ–і–Њ—З–љ—Л—Е —А–∞–±–Њ—В, –∞–Ї—Ж–µ–љ—В–Є—А—Г—П –≤–љ–Є–Љ–∞–љ–Є–µ –љ–∞ –µ–≥–Њ —В–Њ—З–љ–Њ—Б—В–Є –Є –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В—П—Е —Г–ї—Г—З—И–µ–љ–Є—П –Њ–±—А–∞–±–Њ—В–Ї–Є –і–∞–љ–љ—Л—Е. –Ь–µ—В–Њ–і –±—Л–ї –њ—А–Њ—В–µ—Б—В–Є—А–Њ–≤–∞–љ –љ–∞ –Т–∞–љ–Ї–Њ—А—Б–Ї–Њ–Љ –Љ–µ—Б—В–Њ—А–Њ–ґ–і–µ–љ–Є–Є, –Є —А–µ–Ј—Г–ї—М—В–∞—В—Л –њ–Њ–Ї–∞–Ј—Л–≤–∞—О—В –≤—Л—Б–Њ–Ї—Г—О —В–Њ—З–љ–Њ—Б—В—М –≤ –њ–ї–∞–љ–Њ–≤—Л—Е –Ї–Њ–Њ—А–і–Є–љ–∞—В–∞—Е –Є –њ—А–Є–µ–Љ–ї–µ–Љ—Г—О –њ–Њ –≤—Л—Б–Њ—В–µ. –Ю—Б–љ–Њ–≤–љ—Л–Љ–Є –њ—А–µ–Є–Љ—Г—Й–µ—Б—В–≤–∞–Љ–Є –Љ–µ—В–Њ–і–∞ —П–≤–ї—П—О—В—Б—П –Њ—В—Б—Г—В—Б—В–≤–Є–µ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ—Б—В–Є –≤ —Г—Б—В–∞–љ–Њ–≤–Ї–µ –±–∞–Ј–Њ–≤—Л—Е —Б—В–∞–љ—Ж–Є–є –Є –≤—Л—Б–Њ–Ї–∞—П —В–Њ—З–љ–Њ—Б—В—М, –Њ–і–љ–∞–Ї–Њ –µ—Б—В—М –љ–µ–і–Њ—Б—В–∞—В–Ї–Є, —Б–≤—П–Ј–∞–љ–љ—Л–µ —Б –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ—Б—В—М—О –і–Њ—Б—В—Г–њ–∞ –≤ –Є–љ—В–µ—А–љ–µ—В –Є –≤–Њ–Ј–Љ–Њ–ґ–љ—Л–Љ–Є –Ј–∞–і–µ—А–ґ–Ї–∞–Љ–Є –≤ –њ–Њ–ї—Г—З–µ–љ–Є–Є –і–∞–љ–љ—Л—Е.Electronic timetable system in city bus stops
Electronic timetable system in city bus stopsinfoforum
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В —Б–Є—Б—В–µ–Љ—Г –≥–Њ—А–Њ–і—Б–Ї–Є—Е –Њ–њ–Њ–≤–µ—Й–µ–љ–Є–є –Є –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥–∞ —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —Б—А–µ–і—Б—В–≤, –≤–Ї–ї—О—З–∞—П –≤–Є–і–µ–Њ –љ–∞–±–ї—О–і–µ–љ–Є–µ –Є —Н–ї–µ–Ї—В—А–Њ–љ–љ—Л–µ —В–∞–±–ї–Њ –љ–∞ –Њ—Б—В–∞–љ–Њ–≤–Ї–∞—Е. –Я—А–Њ–µ–Ї—В –њ—А–µ–і–њ–Њ–ї–∞–≥–∞–µ—В –Њ–Ї—Г–њ–∞–µ–Љ–Њ—Б—В—М –Є–љ–≤–µ—Б—В–Є—Ж–Є–є –Ј–∞ 2-3 –≥–Њ–і–∞ –Ј–∞ —Б—З–µ—В —А–µ–Ї–ї–∞–Љ—Л –Є –Њ—Б–≤–µ—Й–µ–љ–Є—П —Б–Є–љ—Е—А–Њ–љ–љ–Њ–є –Є–љ—Д–Њ—А–Љ–∞—Ж–Є–Є –Њ –њ—А–Є–±—Л—В–Є–Є —В—А–∞–љ—Б–њ–Њ—А—В–∞. –Ґ–∞–Ї–ґ–µ –Њ—Е–≤–∞—В—Л–≤–∞—О—В—Б—П —В–µ—Е–љ–Њ–ї–Њ–≥–Є–Є –і–ї—П —Б–±–Њ—А–∞ –Є –∞–љ–∞–ї–Є–Ј–∞ –і–∞–љ–љ—Л—Е, –∞ —В–∞–Ї–ґ–µ —Г–њ—А–∞–≤–ї–µ–љ–Є–µ —А–µ–Ї–ї–∞–Љ–љ—Л–Љ –Ї–Њ–љ—В–µ–љ—В–Њ–Љ —З–µ—А–µ–Ј –≤–µ–±-–Є–љ—В–µ—А—Д–µ–є—Б—Л.–У–Є–±–Ї–Є–µ –њ–µ—А–µ—Б—В—А–∞–Є–≤–∞–µ–Љ—Л–µ —Г–Ј–ї—Л –≤–≤–Њ–і–∞- –≤—Л–≤–Њ–і–∞ –љ–Њ–≤–Њ–≥–Њ –њ–Њ–Ї–Њ–ї–µ–љ–Є—П вАУ Cisco nLight ROADM
–У–Є–±–Ї–Є–µ –њ–µ—А–µ—Б—В—А–∞–Є–≤–∞–µ–Љ—Л–µ —Г–Ј–ї—Л –≤–≤–Њ–і–∞- –≤—Л–≤–Њ–і–∞ –љ–Њ–≤–Њ–≥–Њ –њ–Њ–Ї–Њ–ї–µ–љ–Є—П вАУ Cisco nLight ROADM Cisco Russia
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В –∞—А—Е–Є—В–µ–Ї—В—Г—А—Г –љ–Њ–≤–Њ–≥–Њ –њ–Њ–Ї–Њ–ї–µ–љ–Є—П ROADM Cisco NLight, –Ї–Њ—В–Њ—А–∞—П –Њ–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В –≤—Л—Б–Њ–Ї—Г—О –≥–Є–±–Ї–Њ—Б—В—М, –Љ–∞—Б—И—В–∞–±–Є—А—Г–µ–Љ–Њ—Б—В—М –Є –∞–≤—В–Њ–Љ–∞—В–Є–Ј–∞—Ж–Є—О –і–ї—П —Б–µ—В–µ–є DWDM. –Ю—Б–љ–Њ–≤–љ–Њ–µ –≤–љ–Є–Љ–∞–љ–Є–µ —Г–і–µ–ї—П–µ—В—Б—П –Є–љ–љ–Њ–≤–∞—Ж–Є—П–Љ –≤ –Њ–±–ї–∞—Б—В–Є –Њ–±—А–∞–±–Њ—В–Ї–Є —Б–њ–µ–Ї—В—А–∞, –≤–Ї–ї—О—З–∞—П –њ–Њ–і–і–µ—А–ґ–Ї—Г –і–Њ 96 –Ї–∞–љ–∞–ї–Њ–≤ —Б —И–∞–≥–Њ–Љ 50 –У–У—Ж –Є –Є–љ—В–µ–≥—А–∞—Ж–Є—О –љ–Њ–≤—Л—Е –Њ–њ—В–Є—З–µ—Б–Ї–Є—Е –Љ—Г–ї—М—В–Є–њ–ї–µ–Ї—Б–Њ—А–Њ–≤. –Ґ–µ—Е–љ–Њ–ї–Њ–≥–Є–Є —Ж–≤–µ—В–љ—Л—Е –Є –±–µ–Ј—Ж–≤–µ—В–љ—Л—Е –њ–Њ—А—В–Њ–≤, –∞ —В–∞–Ї–ґ–µ –Љ–љ–Њ–≥–Њ–њ–Њ—А—В–Њ–≤—Л–µ –њ–∞—Б—Б–Є–≤–љ—Л–µ –њ–∞—В—З-–њ–∞–љ–µ–ї–Є —Б–Њ–Ј–і–∞—О—В –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є –і–ї—П –њ–Њ—Б—В—А–Њ–µ–љ–Є—П –њ–Њ–ї–љ–Њ—Б—В—М—О –њ–µ—А–µ–љ–∞—Б—В—А–∞–Є–≤–∞–µ–Љ—Л—Е —Б–µ—В–µ–≤—Л—Е –Є–љ—Д—А–∞—Б—В—А—Г–Ї—В—Г—А.–Њ–њ–Є—Б–∞–љ–Є–µ –±–Њ—А—В–Њ–≤–Њ–≥–Њ –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–∞ Locarus 702
–Њ–њ–Є—Б–∞–љ–Є–µ –±–Њ—А—В–Њ–≤–Њ–≥–Њ –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–∞ Locarus 702guest08fd05
ћэ
–С–Њ—А—В–Њ–≤–Њ–є –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А Locarus 702 –њ—А–µ–і–љ–∞–Ј–љ–∞—З–µ–љ –і–ї—П –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥–∞ –њ–∞—А–∞–Љ–µ—В—А–Њ–≤ —В—А–∞–љ—Б–њ–Њ—А—В–љ–Њ–≥–Њ —Б—А–µ–і—Б—В–≤–∞, –≤–Ї–ї—О—З–∞—П –Љ–µ—Б—В–Њ–њ–Њ–ї–Њ–ґ–µ–љ–Є–µ, –њ—А–Њ–±–µ–≥ –Є —Б–Ї–Њ—А–Њ—Б—В—М. –Ю–љ –њ–Њ–і–і–µ—А–ґ–Є–≤–∞–µ—В –і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ—Л–µ –і–∞—В—З–Є–Ї–Є –Є –Љ–Њ–ґ–µ—В –Њ—Б—Г—Й–µ—Б—В–≤–ї—П—В—М —Г–і–∞–ї–µ–љ–љ–Њ–µ —Г–њ—А–∞–≤–ї–µ–љ–Є–µ —З–µ—А–µ–Ј –Љ–Њ–±–Є–ї—М–љ—Л–µ —Г—Б—В—А–Њ–є—Б—В–≤–∞ –Є –Я–Ъ. –£—Б—В—А–Њ–є—Б—В–≤–Њ –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В GPS –Є GPRS —В–µ—Е–љ–Њ–ї–Њ–≥–Є–Є, –Њ–±–µ—Б–њ–µ—З–Є–≤–∞—П —Г–њ—А–∞–≤–ї–µ–љ–Є–µ –Є –Ї–Њ–љ—В—А–Њ–ї—М –≤ —А–µ–∞–ї—М–љ–Њ–Љ –≤—А–µ–Љ–µ–љ–Є.195
195nreferat
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В —Б—В—А—Г–Ї—В—Г—А—Г –Є –∞–ї–≥–Њ—А–Є—В–Љ—Л —А–∞–±–Њ—В—Л —Б–њ—Г—В–љ–Є–Ї–Њ–≤—Л—Е —А–∞–і–Є–Њ–љ–∞–≤–Є–≥–∞—Ж–Є–Њ–љ–љ—Л—Е —Б–Є—Б—В–µ–Љ, –≤–Ї–ї—О—З–∞—П –њ—А–Є–љ—Ж–Є–њ—Л —А–∞–±–Њ—В—Л —Б–Є—Б—В–µ–Љ –У–Ы–Ю–Э–Р–°–° –Є GPS, –Є—Е –Ї–ї—О—З–µ–≤—Л–µ –њ–Њ–і—Б–Є—Б—В–µ–Љ—Л –Є —Д—Г–љ–Ї—Ж–Є–Њ–љ–∞–ї—М–љ—Л–µ –Њ–њ–µ—А–∞—Ж–Є–Є. –Ю—Б–љ–Њ–≤–љ–Њ–µ –≤–љ–Є–Љ–∞–љ–Є–µ —Г–і–µ–ї—П–µ—В—Б—П –Љ–µ—В–Њ–і–∞–Љ –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П –Ї–Њ–Њ—А–і–Є–љ–∞—В –њ–Њ—В—А–µ–±–Є—В–µ–ї–µ–є, –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ–Љ —А–∞–Ј–ї–Є—З–љ—Л—Е –њ–Њ–і—Е–Њ–і–Њ–≤, —В–∞–Ї–Є—Е –Ї–∞–Ї –і–∞–ї—М–љ–Њ–Љ–µ—А–љ—Л–µ –Є —А–∞–Ј–љ–Њ—Б—В–љ–Њ-–і–∞–ї—М–љ–Њ–Љ–µ—А–љ—Л–µ –Љ–µ—В–Њ–і—Л, –∞ —В–∞–Ї–ґ–µ —А–∞—Б—Б–Љ–Њ—В—А–µ–љ—Л —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї–Є –Є —Д—Г–љ–Ї—Ж–Є–Є –љ–∞–≤–Є–≥–∞—Ж–Є–Њ–љ–љ—Л—Е —Б–Є–≥–љ–∞–ї–Њ–≤. –Т –Ј–∞–Ї–ї—О—З–µ–љ–Є–µ, –Њ—Б–≤–µ—Й–∞—О—В—Б—П –∞–ї–≥–Њ—А–Є—В–Љ—Л –Њ–±—А–∞–±–Њ—В–Ї–Є —Б–Є–≥–љ–∞–ї–Њ–≤ –Є –Є–Ј–≤–ї–µ—З–µ–љ–Є—П –љ–∞–≤–Є–≥–∞—Ж–Є–Њ–љ–љ–Њ–є –Є–љ—Д–Њ—А–Љ–∞—Ж–Є–Є, –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ–є –і–ї—П —В–Њ—З–љ–Њ–≥–Њ –њ–Њ–Ј–Є—Ж–Є–Њ–љ–Є—А–Њ–≤–∞–љ–Є—П.–Ґ–Є–њ–Њ–≤—Л–µ —Б–µ—А–≤–Є—Б—Л —А–µ–≥–Є–Њ–љ–∞–ї—М–љ–Њ–є —Б–µ—В–Є –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—Е
–Ґ–Є–њ–Њ–≤—Л–µ —Б–µ—А–≤–Є—Б—Л —А–µ–≥–Є–Њ–љ–∞–ї—М–љ–Њ–є —Б–µ—В–Є –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—ЕARCCN
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В —В–Є–њ–Њ–≤—Л–µ —Б–µ—А–≤–Є—Б—Л —А–µ–≥–Є–Њ–љ–∞–ї—М–љ–Њ–є —Б–µ—В–Є –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—Е –Є –Є—Е –∞—А—Е–Є—В–µ–Ї—В—Г—А—Г, –≤–Ї–ї—О—З–∞—П —Г–њ—А–∞–≤–ї–µ–љ–Є–µ —В—А–∞—Д–Є–Ї–Њ–Љ, –Њ—В–Ї–∞–Ј–Њ—Г—Б—В–Њ–є—З–Є–≤–Њ—Б—В—М –Є –Љ–∞—А—И—А—Г—В–Є–Ј–∞—Ж–Є—О. –Ю–љ —В–∞–Ї–ґ–µ –Њ—Б–≤–µ—Й–∞–µ—В –і–µ—В–∞–ї–Є –Њ–±–µ—Б–њ–µ—З–µ–љ–Є—П –љ–∞–і–µ–ґ–љ–Њ–≥–Њ –і–Њ—Б—В—Г–њ–∞ –Ї –Є–љ—В–µ—А–љ–µ—В—Г –Є —Б–µ—А–≤–Є—Б–∞–Љ –і–ї—П –∞–±–Њ–љ–µ–љ—В–Њ–≤ —Б –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ–Љ —А–∞–Ј–ї–Є—З–љ—Л—Е —В–µ—Е–љ–Њ–ї–Њ–≥–Є–є –Є –Љ–Њ–і–µ–ї–µ–є. –Ю—Б–љ–Њ–≤–љ–Њ–µ –≤–љ–Є–Љ–∞–љ–Є–µ —Г–і–µ–ї—П–µ—В—Б—П —Г–њ—А–∞–≤–ї–µ–љ–Є—О —Б–µ—В—М—О —З–µ—А–µ–Ј –њ—А–Њ–Є–Ј–≤–Њ–ї—М–љ—Л–µ —В–Њ–њ–Њ–ї–Њ–≥–Є–Є –Є –њ–Њ–і–і–µ—А–ґ–Ї–µ –њ–Њ–ї–Є—В–Є–Ї –Ї–∞—З–µ—Б—В–≤–∞ –Њ–±—Б–ї—Г–ґ–Є–≤–∞–љ–Є—П.2016 –Ч–∞–±–µ–ї–Є–љ –Т—П—З–µ—Б–ї–∞–≤ –Р–љ–і—А–µ–µ–≤–Є—З –С–∞–Ї–∞–ї–∞–≤—А—Б–Ї–∞—П —А–∞–±–Њ—В–∞: –†–∞–Ј—А–∞–±–Њ—В–Ї–∞ –њ—А–Њ–≥—А–∞–Љ–Љ–љ—Л—Е —Б...
2016 –Ч–∞–±–µ–ї–Є–љ –Т—П—З–µ—Б–ї–∞–≤ –Р–љ–і—А–µ–µ–≤–Є—З –С–∞–Ї–∞–ї–∞–≤—А—Б–Ї–∞—П —А–∞–±–Њ—В–∞: –†–∞–Ј—А–∞–±–Њ—В–Ї–∞ –њ—А–Њ–≥—А–∞–Љ–Љ–љ—Л—Е —Б...RF-Lab
ћэ
–Т –≤—Л–њ—Г—Б–Ї–љ–Њ–є –Ї–≤–∞–ї–Є—Д–Є–Ї–∞—Ж–Є–Њ–љ–љ–Њ–є —А–∞–±–Њ—В–µ —А–∞—Б—Б–Љ–∞—В—А–Є–≤–∞–µ—В—Б—П —А–∞–Ј—А–∞–±–Њ—В–Ї–∞ –њ—А–Њ–≥—А–∞–Љ–Љ–љ—Л—Е —Б—А–µ–і—Б—В–≤ –і–ї—П –Њ–±–љ–∞—А—Г–ґ–µ–љ–Є—П –Є –∞–љ–∞–ї–Є–Ј–∞ —Б–Є–≥–љ–∞–ї–Њ–≤ —Б–Є—Б—В–µ–Љ —Б–њ—Г—В–љ–Є–Ї–Њ–≤–Њ–≥–Њ –њ–Њ–Ј–Є—Ж–Є–Њ–љ–Є—А–Њ–≤–∞–љ–Є—П GPS, –У–Ы–Ю–Э–Р–°–° –Є Beidou. –¶–µ–ї—М —А–∞–±–Њ—В—Л –Ј–∞–Ї–ї—О—З–∞–µ—В—Б—П –≤ —Б–Њ–Ј–і–∞–љ–Є–Є –∞–ї–≥–Њ—А–Є—В–Љ–∞, –њ–Њ–Ј–≤–Њ–ї—П—О—Й–µ–≥–Њ —Н—Д—Д–µ–Ї—В–Є–≤–љ–Њ –Њ–±–љ–∞—А—Г–ґ–Є–≤–∞—В—М —Б–Є–≥–љ–∞–ї—Л, —Б –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ–Љ –Љ–µ—В–Њ–і–∞ –±—Л—Б—В—А–Њ–≥–Њ –њ—А–µ–Њ–±—А–∞–Ј–Њ–≤–∞–љ–Є—П –§—Г—А—М–µ –і–ї—П —Б–љ–Є–ґ–µ–љ–Є—П –≤—Л—З–Є—Б–ї–Є—В–µ–ї—М–љ—Л—Е –Ј–∞—В—А–∞—В. –†–µ–Ј—Г–ї—М—В–∞—В—Л –Љ–Њ–і–µ–ї–Є—А–Њ–≤–∞–љ–Є—П –њ–Њ–і—В–≤–µ—А–і–Є–ї–Є —Г–љ–Є–≤–µ—А—Б–∞–ї—М–љ–Њ—Б—В—М —А–∞–Ј—А–∞–±–Њ—В–∞–љ–љ–Њ–є –њ—А–Њ—Ж–µ–і—Г—А—Л –≤ –Њ–±–љ–∞—А—Г–ґ–µ–љ–Є–Є —Б–Є–≥–љ–∞–ї–Њ–≤ –і–∞–љ–љ—Л—Е —Б–Є—Б—В–µ–Љ.10291
10291ivanov15666688
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В –њ–∞—В–µ–љ—В –љ–∞ –≤—Б–µ–љ–∞–њ—А–∞–≤–ї–µ–љ–љ—Г—О —Б–Є—Б—В–µ–Љ—Г —В—А–µ–≤–Њ–ґ–љ–Њ–є —Б–Є–≥–љ–∞–ї–Є–Ј–∞—Ж–Є–Є –і–ї—П —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —Б—А–µ–і—Б—В–≤, —Б–Њ–і–µ—А–ґ–∞—Й—Г—О –њ—А–Њ—Ж–µ—Б—Б–Њ—А, –Љ–Њ–і—Г–ї–Є —Б–Є–≥–љ–∞–ї–Є–Ј–∞—Ж–Є–Є –Њ–њ–∞—Б–љ–Њ—Б—В–Є –Є –љ–∞–њ—А–∞–≤–ї–µ–љ–Є—П –Њ–њ–∞—Б–љ–Њ—Б—В–Є, –∞ —В–∞–Ї–ґ–µ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—М–љ–Њ–µ —Г—Б—В—А–Њ–є—Б—В–≤–Њ –і–≤—Г—Б—В–Њ—А–Њ–љ–љ–µ–є —Б–≤—П–Ј–Є. –°–Є—Б—В–µ–Љ–∞ –њ—А–µ–і–љ–∞–Ј–љ–∞—З–µ–љ–∞ –і–ї—П –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П —Г—А–Њ–≤–љ—П –Њ–њ–∞—Б–љ–Њ—Б—В–Є –љ–∞ –Њ—Б–љ–Њ–≤–µ —Б–Є–≥–љ–∞–ї–Њ–≤ –Њ–±–љ–∞—А—Г–ґ–µ–љ–Є—П, —А–∞—Б—Б—В–Њ—П–љ–Є—П –і–Њ —Б–Њ—Б–µ–і–љ–Є—Е —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —Б—А–µ–і—Б—В–≤ –Є —Б–Њ—Б—В–Њ—П–љ–Є—П –≤–Њ–і–Є—В–µ–ї—П. –Ю—Б–љ–Њ–≤–љ–Њ–є —Ж–µ–ї—М—О —А–∞–Ј—А–∞–±–Њ—В–Ї–Є —П–≤–ї—П–µ—В—Б—П –њ–Њ–≤—Л—И–µ–љ–Є–µ –±–µ–Ј–Њ–њ–∞—Б–љ–Њ—Б—В–Є –і–Њ—А–Њ–ґ–љ–Њ–≥–Њ –і–≤–Є–ґ–µ–љ–Є—П —З–µ—А–µ–Ј –Љ–≥–љ–Њ–≤–µ–љ–љ–Њ–µ —Г–≤–µ–і–Њ–Љ–ї–µ–љ–Є–µ –≤–Њ–і–Є—В–µ–ї–µ–є –Њ–± –Њ–њ–∞—Б–љ–Њ—Б—В—П—Е.ANTOR MonitorMaster_buklet
ANTOR MonitorMaster_buklet–Р–љ–і—А–µ–є –Ъ—Г—З–µ—А–Њ–≤
ћэ
–°–Є—Б—В–µ–Љ–∞ antor monitormaster –Њ–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥ —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —Б—А–µ–і—Б—В–≤ –Є –Љ–Њ–±–Є–ї—М–љ—Л—Е –Њ–±—К–µ–Ї—В–Њ–≤, –њ–Њ–Ј–≤–Њ–ї—П—П –Ї–Њ–љ—В—А–Њ–ї–Є—А–Њ–≤–∞—В—М –Є—Е –Љ–µ—Б—В–Њ–њ–Њ–ї–Њ–ґ–µ–љ–Є–µ, –Љ–∞—А—И—А—Г—В—Л, —А–∞—Б—Е–Њ–і —В–Њ–њ–ї–Є–≤–∞ –Є —Б–Њ—Б—В–Њ—П–љ–Є–µ. –Т–Ї–ї—О—З–∞–µ—В —Б–њ–µ—Ж–Є–∞–ї–Є–Ј–Є—А–Њ–≤–∞–љ–љ—Л–µ —Г—Б—В—А–Њ–є—Б—В–≤–∞ –і–ї—П —Б–±–Њ—А–∞ –і–∞–љ–љ—Л—Е –Є –њ—А–µ–і–Њ—Б—В–∞–≤–ї—П–µ—В –∞–љ–∞–ї–Є—В–Є—З–µ—Б–Ї–Є–µ —Д—Г–љ–Ї—Ж–Є–Є –і–ї—П —Г–њ—А–∞–≤–ї–µ–љ–Є—П –ї–Њ–≥–Є—Б—В–Є–Ї–Њ–є –Є —Б–љ–Є–ґ–µ–љ–Є—О –Ј–∞—В—А–∞—В –љ–∞ —Н–Ї—Б–њ–ї—Г–∞—В–∞—Ж–Є—О. –Ш—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ —Б–Є—Б—В–µ–Љ—Л –њ–Њ–Ј–≤–Њ–ї—П–µ—В —Б–Њ–Ї—А–∞—В–Є—В—М —А–∞—Б—Е–Њ–і—Л –љ–∞ –У–°–Ь –Є —В–µ—Е–љ–Є—З–µ—Б–Ї–Њ–µ –Њ–±—Б–ї—Г–ґ–Є–≤–∞–љ–Є–µ, –∞ —В–∞–Ї–ґ–µ –њ–Њ–≤—Л—Б–Є—В—М –±–µ–Ј–Њ–њ–∞—Б–љ–Њ—Б—В—М –Є –і–Є—Б—Ж–Є–њ–ї–Є–љ—Г –≤–Њ–і–Є—В–µ–ї–µ–є.Rusnavgeoset LLC
Rusnavgeoset LLCdripfeeder
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В –њ—А–Њ–µ–Ї—В —Б–Њ–Ј–і–∞–љ–Є—П —Б–µ—В–Є –У–Ы–Ю–Э–Р–°–° —Б –њ–Њ–ї–љ—Л–Љ –љ–∞–±–Њ—А–Њ–Љ —Д—Г–љ–Ї—Ж–Є–є –і–ї—П —А–∞–Ј–ї–Є—З–љ—Л—Е —Б—Д–µ—А –њ—А–Є–Љ–µ–љ–µ–љ–Є—П, —В–∞–Ї–Є—Е –Ї–∞–Ї –Ј–µ–Љ–µ–ї—М–љ—Л–є –Ї–∞–і–∞—Б—В—А, –≥—А–∞–і–Њ—Б—В—А–Њ–Є—В–µ–ї—М—Б—В–≤–Њ –Є –і–Њ—А–Њ–ґ–љ–Њ–µ —Б—В—А–Њ–Є—В–µ–ї—М—Б—В–≤–Њ. –Ю–љ –њ–Њ–і—З–µ—А–Ї–Є–≤–∞–µ—В –≤–∞–ґ–љ–Њ—Б—В—М –љ–∞–і–µ–ґ–љ–Њ—Б—В–Є –Є –Њ–њ—В–Є–Љ–Є–Ј–∞—Ж–Є–Є —Б–µ—В–Є, –∞ —В–∞–Ї–ґ–µ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ –Њ–±–ї–∞—З–љ—Л—Е —В–µ—Е–љ–Њ–ї–Њ–≥–Є–є –і–ї—П —Е—А–∞–љ–µ–љ–Є—П –і–∞–љ–љ—Л—Е, —З—В–Њ –Њ–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В —Н–Ї–Њ–љ–Њ–Љ–Є—О –Є –≤—Л—Б–Њ–Ї—Г—О —Б—В–µ–њ–µ–љ—М –і–Њ—Б—В—Г–њ–љ–Њ—Б—В–Є. –Ґ–∞–Ї–ґ–µ –њ—А–µ–і—Б—В–∞–≤–ї–µ–љ—Л —В–µ—Е–љ–Є—З–µ—Б–Ї–Є–µ —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї–Є –Њ–±–Њ—А—Г–і–Њ–≤–∞–љ–Є—П –Є —Г—Б–ї–Њ–≤–Є—П –і–ї—П –њ–∞—А—В–љ–µ—А–Њ–≤ –Є –Њ–њ–µ—А–∞—В–Њ—А–Њ–≤, –≤–Ї–ї—О—З–∞—П –∞—Б–њ–µ–Ї—В—Л –Њ–Ї—Г–њ–∞–µ–Љ–Њ—Б—В–Є —Б–µ—В–Є.Gps online
Gps onlineMamed-13
ћэ
–Ъ–Њ–Љ–њ–∞–љ–Є—П '–°–∞—А—Д–∞—А–Њ–Ј' –њ—А–µ–і–ї–∞–≥–∞–µ—В —А–µ—И–µ–љ–Є—П –і–ї—П —Б–њ—Г—В–љ–Є–Ї–Њ–≤–Њ–≥–Њ –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥–∞ —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —Б—А–µ–і—Б—В–≤, –њ–Њ–Ј–≤–Њ–ї—П—О—Й–Є–µ –Ї–Њ–љ—В—А–Њ–ї–Є—А–Њ–≤–∞—В—М –Љ–µ—Б—В–Њ–њ–Њ–ї–Њ–ґ–µ–љ–Є–µ, —Б–Ї–Њ—А–Њ—Б—В—М –Є —А–∞—Б—Е–Њ–і —В–Њ–њ–ї–Є–≤–∞ —З–µ—А–µ–Ј –≤–µ–±-–Є–љ—В–µ—А—Д–µ–є—Б. –°–Є—Б—В–µ–Љ–∞ —Б–њ–Њ—Б–Њ–±—Б—В–≤—Г–µ—В —Б–љ–Є–ґ–µ–љ–Є—О —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —А–∞—Б—Е–Њ–і–Њ–≤ –Є –Њ–њ–µ—А–∞—В–Є–≤–љ–Њ–Љ—Г —Г–њ—А–∞–≤–ї–µ–љ–Є—О –∞–≤—В–Њ–њ–∞—А–Ї–Њ–Љ, –∞ —В–∞–Ї–ґ–µ –њ—А–µ–і–ї–∞–≥–∞–µ—В –Њ—В—З–µ—В–љ–Њ—Б—В—М –Є —В–µ—Е–љ–Є—З–µ—Б–Ї—Г—О –њ–Њ–і–і–µ—А–ґ–Ї—Г. –£—Б–ї—Г–≥–∞ –≤–Ї–ї—О—З–∞–µ—В –Ї—А—Г–≥–ї–Њ—Б—Г—В–Њ—З–љ—Л–є –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥, –∞–љ–∞–ї–Є–Ј –і–∞–љ–љ—Л—Е –Є –≥–Є–±–Ї–Є–µ –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є –Њ—В—З–µ—В–љ–Њ—Б—В–Є –Њ —А–∞–±–Њ—В–µ —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —Б—А–µ–і—Б—В–≤.Gps online
Gps onlineGPS-online
ћэ
–Ъ–Њ–Љ–њ–∞–љ–Є—П '–°–∞—А—Д–∞—А–Њ–Ј' –њ—А–µ–і–ї–∞–≥–∞–µ—В —А–µ—И–µ–љ–Є—П –і–ї—П —Б–њ—Г—В–љ–Є–Ї–Њ–≤–Њ–≥–Њ –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥–∞ —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —Б—А–µ–і—Б—В–≤, –≤–Ї–ї—О—З–∞—П GPS/GSM —В—А–µ–Ї–µ—А—Л, –Ї–Њ—В–Њ—А—Л–µ –њ–Њ–Ј–≤–Њ–ї—П—О—В –Ї–Њ–љ—В—А–Њ–ї–Є—А–Њ–≤–∞—В—М –Љ–µ—Б—В–Њ–њ–Њ–ї–Њ–ґ–µ–љ–Є–µ, —Б–Ї–Њ—А–Њ—Б—В—М –Є —А–∞—Б—Е–Њ–і —В–Њ–њ–ї–Є–≤–∞. –°–Є—Б—В–µ–Љ–∞ –Њ–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В –Ї—А—Г–≥–ї–Њ—Б—Г—В–Њ—З–љ—Л–є –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥ —З–µ—А–µ–Ј –≤–µ–±-–Є–љ—В–µ—А—Д–µ–є—Б, —Б–љ–Є–ґ–∞—П —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л–µ —А–∞—Б—Е–Њ–і—Л –Є –њ–Њ–≤—Л—И–∞—П –Њ–њ–µ—А–∞—В–Є–≤–љ–Њ—Б—В—М —А–µ–∞–≥–Є—А–Њ–≤–∞–љ–Є—П –љ–∞ –љ–µ—И—В–∞—В–љ—Л–µ —Б–Є—В—Г–∞—Ж–Є–Є. –£—Б–ї—Г–≥–Є –≤–Ї–ї—О—З–∞—О—В —В–µ—Е–љ–Є—З–µ—Б–Ї—Г—О –њ–Њ–і–і–µ—А–ґ–Ї—Г, –Њ—В—З–µ—В–љ–Њ—Б—В—М –Є –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В—М –љ–∞—Б—В—А–Њ–є–Ї–Є —Д—Г–љ–Ї—Ж–Є–Њ–љ–∞–ї—М–љ–Њ—Б—В–Є —Б–Є—Б—В–µ–Љ—Л.–°–Ї–Њ—А–њ–Є–Њ–љ –Ь
–°–Ї–Њ—А–њ–Є–Њ–љ –ЬNTCRTS
ћэ
–Ь–Њ–±–Є–ї—М–љ–∞—П —Б—В–∞–љ—Ж–Є—П —А–∞–і–Є–Њ–Ї–Њ–љ—В—А–Њ–ї—П VHF-UHF ¬Ђ–°–Ї–Њ—А–њ–Є–Њ–љ-–Ь¬ї –њ—А–µ–і–љ–∞–Ј–љ–∞—З–µ–љ–∞ –і–ї—П –Њ–±–љ–∞—А—Г–ґ–µ–љ–Є—П, –њ–µ–ї–µ–љ–≥–Њ–≤–∞–љ–Є—П –Є —А–µ–≥–Є—Б—В—А–∞—Ж–Є–Є —Б–Є–≥–љ–∞–ї–Њ–≤ –≤ –і–Є–∞–њ–∞–Ј–Њ–љ–µ —З–∞—Б—В–Њ—В 25-3000 –Ь–У—Ж. –Ю–љ–∞ –Њ–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В –њ–∞–љ–Њ—А–∞–Љ–љ—Л–є –Њ–±–Ј–Њ—А, –∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–Њ–µ –Њ–±–љ–∞—А—Г–ґ–µ–љ–Є–µ –Є—Б—В–Њ—З–љ–Є–Ї–Њ–≤ —А–∞–і–Є–Њ–Є–Ј–ї—Г—З–µ–љ–Є—П –Є –≤–Ј–∞–Є–Љ–Њ–і–µ–є—Б—В–≤–Є–µ –≤ –њ–µ–ї–µ–љ–≥–∞—В–Њ—А–љ–Њ–є —Б–µ—В–Є, –∞ —В–∞–Ї–ґ–µ —А–∞–Ј–Љ–µ—Й–∞–µ—В—Б—П –љ–∞ –∞–≤—В–Њ–Љ–Њ–±–Є–ї–µ –Є —А–∞–±–Њ—В–∞–µ—В –≤ —А–µ–ґ–Є–Љ–µ –∞–≤—В–Њ–љ–Њ–Љ–љ–Њ–≥–Њ –Є —Б—В–∞—Ж–Є–Њ–љ–∞—А–љ–Њ–≥–Њ –њ–Є—В–∞–љ–Є—П. –Ю–±–Њ—А—Г–і–Њ–≤–∞–љ–Є–µ –≤–Ї–ї—О—З–∞–µ—В –≤—Л—Б–Њ–Ї–Њ—Б–Ї–Њ—А–Њ—Б—В–љ—Л–µ –њ–µ–ї–µ–љ–≥–∞—В–Њ—А—Л, GPS-–љ–∞–≤–Є–≥–∞—В–Њ—А—Л –Є –Ї–Њ–Љ–њ—М—О—В–µ—А –і–ї—П –Њ–±—А–∞–±–Њ—В–Ї–Є –і–∞–љ–љ—Л—Е, –і–Њ—Б—В—Г–њ–љ—Л–µ –і–ї—П —А–∞–Ј–ї–Є—З–љ—Л—Е –Ї–Њ–љ—Д–Є–≥—Г—А–∞—Ж–Є–є –≤ –Ј–∞–≤–Є—Б–Є–Љ–Њ—Б—В–Є –Њ—В —В—А–µ–±–Њ–≤–∞–љ–Є–є –Ј–∞–Ї–∞–Ј—З–Є–Ї–∞.–Ю–±–Ј–Њ—А –Є –љ–Њ–≤—Л–µ –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є –∞—А—Е–Є—В–µ–Ї—В—Г—А—Л CisconLight. –Я–ї–∞—В—Д–Њ—А–Љ–∞ NCS 2000
–Ю–±–Ј–Њ—А –Є –љ–Њ–≤—Л–µ –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є –∞—А—Е–Є—В–µ–Ї—В—Г—А—Л CisconLight. –Я–ї–∞—В—Д–Њ—А–Љ–∞ NCS 2000Cisco Russia
ћэ
–У–Є–±–Ї–Є–µ –њ–µ—А–µ—Б—В—А–∞–Є–≤–∞–µ–Љ—Л–µ —Г–Ј–ї—Л –≤–≤–Њ–і–∞- –≤—Л–≤–Њ–і–∞ –љ–Њ–≤–Њ–≥–Њ –њ–Њ–Ї–Њ–ї–µ–љ–Є—П вАУ Cisco nLight ROADM
–У–Є–±–Ї–Є–µ –њ–µ—А–µ—Б—В—А–∞–Є–≤–∞–µ–Љ—Л–µ —Г–Ј–ї—Л –≤–≤–Њ–і–∞- –≤—Л–≤–Њ–і–∞ –љ–Њ–≤–Њ–≥–Њ –њ–Њ–Ї–Њ–ї–µ–љ–Є—П вАУ Cisco nLight ROADM Cisco Russia
ћэ
–Ґ–Є–њ–Њ–≤—Л–µ —Б–µ—А–≤–Є—Б—Л —А–µ–≥–Є–Њ–љ–∞–ї—М–љ–Њ–є —Б–µ—В–Є –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—Е
–Ґ–Є–њ–Њ–≤—Л–µ —Б–µ—А–≤–Є—Б—Л —А–µ–≥–Є–Њ–љ–∞–ї—М–љ–Њ–є —Б–µ—В–Є –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—ЕARCCN
ћэ
2016 –Ч–∞–±–µ–ї–Є–љ –Т—П—З–µ—Б–ї–∞–≤ –Р–љ–і—А–µ–µ–≤–Є—З –С–∞–Ї–∞–ї–∞–≤—А—Б–Ї–∞—П —А–∞–±–Њ—В–∞: –†–∞–Ј—А–∞–±–Њ—В–Ї–∞ –њ—А–Њ–≥—А–∞–Љ–Љ–љ—Л—Е —Б...
2016 –Ч–∞–±–µ–ї–Є–љ –Т—П—З–µ—Б–ї–∞–≤ –Р–љ–і—А–µ–µ–≤–Є—З –С–∞–Ї–∞–ї–∞–≤—А—Б–Ї–∞—П —А–∞–±–Њ—В–∞: –†–∞–Ј—А–∞–±–Њ—В–Ї–∞ –њ—А–Њ–≥—А–∞–Љ–Љ–љ—Л—Е —Б...RF-Lab
ћэ
More from –Р–ї–µ–Ї—Б–µ–є –С–Њ—А–Њ–≤—Б–Ї–Њ–є (11)
–≠–Ї–Ј–∞–Љ–µ–љ–∞—Ж–Є–Њ–љ–љ—Л–µ –≤–Њ–њ—А–Њ—Б—Л –Є—В 4 –Ї—Г—А—Б 2011 –≥–Њ–і
–≠–Ї–Ј–∞–Љ–µ–љ–∞—Ж–Є–Њ–љ–љ—Л–µ –≤–Њ–њ—А–Њ—Б—Л –Є—В 4 –Ї—Г—А—Б 2011 –≥–Њ–і–Р–ї–µ–Ї—Б–µ–є –С–Њ—А–Њ–≤—Б–Ї–Њ–є
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В —Б–Њ–і–µ—А–ґ–Є—В —Н–Ї–Ј–∞–Љ–µ–љ–∞—Ж–Є–Њ–љ–љ—Л–µ –≤–Њ–њ—А–Њ—Б—Л –њ–Њ –і–Є—Б—Ж–Є–њ–ї–Є–љ–µ '–Є–љ—Д–Њ—А–Љ–∞—Ж–Є–Њ–љ–љ—Л–µ —В–µ—Е–љ–Њ–ї–Њ–≥–Є–Є –љ–∞ —В—А–∞–љ—Б–њ–Њ—А—В–µ', –Њ—Е–≤–∞—В—Л–≤–∞—О—Й–Є–µ —В–µ–Љ—Л –ї–Њ–Ї–∞–ї—М–љ—Л—Е –Ї–Њ–Љ–њ—М—О—В–µ—А–љ—Л—Е —Б–µ—В–µ–є, –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—Е –Є –≥–Њ–ї–Њ—Б–Њ–≤—Л—Е —Б–Њ–Њ–±—Й–µ–љ–Є–є, –Њ–±–µ—Б–њ–µ—З–µ–љ–Є—П –Є–љ—Д–Њ—А–Љ–∞—Ж–Є–Њ–љ–љ–Њ–є –±–µ–Ј–Њ–њ–∞—Б–љ–Њ—Б—В–Є –Є –∞–≤—В–Њ–Љ–∞—В–Є–Ј–Є—А–Њ–≤–∞–љ–љ—Л—Е —Б–Є—Б—В–µ–Љ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –і–Њ—А–Њ–ґ–љ—Л–Љ –і–≤–Є–ґ–µ–љ–Є–µ–Љ. –Ъ–∞–ґ–і–∞—П —В–µ–Љ–∞ –і–µ—В–∞–ї–Є–Ј–Є—А—Г–µ—В—Б—П —З–µ—А–µ–Ј –Ї–ї—О—З–µ–≤—Л–µ —В–µ—А–Љ–Є–љ—Л, –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П –Є –Њ–±—Б—Г–ґ–і–µ–љ–Є–µ —В–µ—Е–љ–Њ–ї–Њ–≥–Є–є, —В–∞–Ї–Є—Е –Ї–∞–Ї —Б–Є–≥–љ–∞–ї—Л, –±–∞–Ј—Л –і–∞–љ–љ—Л—Е –Є —Б–Є—Б—В–µ–Љ—Л —Б–њ—Г—В–љ–Є–Ї–Њ–≤–Њ–є –љ–∞–≤–Є–≥–∞—Ж–Є–Є. –Ю—Б–љ–Њ–≤–љ–Њ–µ –≤–љ–Є–Љ–∞–љ–Є–µ —Г–і–µ–ї—П–µ—В—Б—П –Ї–Њ–љ—Ж–µ–њ—Ж–Є—П–Љ, –Є—Е –і–Њ—Б—В–Њ–Є–љ—Б—В–≤–∞–Љ –Є –љ–µ–і–Њ—Б—В–∞—В–Ї–∞–Љ, –∞ —В–∞–Ї–ґ–µ —Б—В–∞–љ–і–∞—А—В–∞–Љ –Є –Ї–ї–∞—Б—Б–Є—Д–Є–Ї–∞—Ж–Є—П–Љ.–†–£–Ъ–Ю–Т–Ю–Ф–°–Ґ–Т–Ю –Я–Ю –Я–†–Ю–У–Э–Ю–Ч–Ш–†–Ю–Т–Р–Э–Ш–Ѓ –Ш–Э–Ґ–Х–Э–°–Ш–Т–Э–Ю–°–Ґ–Ш –Ф–Т–Ш–Ц–Х–Э–Ш–ѓ –Э–Р –Р–Т–Ґ–Ю–Ь–Ю–С–Ш–Ы–ђ–Э–Ђ–• –Ф–Ю–†–Ю–У–Р–•
–†–£–Ъ–Ю–Т–Ю–Ф–°–Ґ–Т–Ю –Я–Ю –Я–†–Ю–У–Э–Ю–Ч–Ш–†–Ю–Т–Р–Э–Ш–Ѓ –Ш–Э–Ґ–Х–Э–°–Ш–Т–Э–Ю–°–Ґ–Ш –Ф–Т–Ш–Ц–Х–Э–Ш–ѓ –Э–Р –Р–Т–Ґ–Ю–Ь–Ю–С–Ш–Ы–ђ–Э–Ђ–• –Ф–Ю–†–Ю–У–Р–•–Р–ї–µ–Ї—Б–µ–є –С–Њ—А–Њ–≤—Б–Ї–Њ–є
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В —П–≤–ї—П–µ—В—Б—П –Љ–µ—В–Њ–і–Є—З–µ—Б–Ї–Є–Љ —А—Г–Ї–Њ–≤–Њ–і—Б—В–≤–Њ–Љ –њ–Њ –њ—А–Њ–≥–љ–Њ–Ј–Є—А–Њ–≤–∞–љ–Є—О –Є–љ—В–µ–љ—Б–Є–≤–љ–Њ—Б—В–Є –і–≤–Є–ґ–µ–љ–Є—П –љ–∞ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—М–љ—Л—Е –і–Њ—А–Њ–≥–∞—Е, —Г—В–≤–µ—А–ґ–і–µ–љ–љ—Л–Љ –Ь–Є–љ–Є—Б—В–µ—А—Б—В–≤–Њ–Љ —В—А–∞–љ—Б–њ–Њ—А—В–∞ –†–Њ—Б—Б–Є–є—Б–Ї–Њ–є –§–µ–і–µ—А–∞—Ж–Є–Є. –Ю–љ –Њ—Е–≤–∞—В—Л–≤–∞–µ—В —А–∞—Б—З–µ—В—Л —Б—А–µ–і–љ–µ–≥–Њ–і–Њ–≤–Њ–є —Б—Г—В–Њ—З–љ–Њ–є –Є–љ—В–µ–љ—Б–Є–≤–љ–Њ—Б—В–Є –і–≤–Є–ґ–µ–љ–Є—П –∞–≤—В–Њ—В—А–∞–љ—Б–њ–Њ—А—В–∞ –Ї–∞–Ї –љ–∞ —Д–µ–і–µ—А–∞–ї—М–љ—Л—Е, —В–∞–Ї –Є –љ–∞ –≥–Њ—А–Њ–і—Б–Ї–Є—Е –і–Њ—А–Њ–≥–∞—Е, —Г—З–Є—В—Л–≤–∞—П —З–Є—Б–ї–µ–љ–љ–Њ—Б—В—М –љ–∞—Б–µ–ї–µ–љ–Є—П –Є –∞–і–Љ–Є–љ–Є—Б—В—А–∞—В–Є–≤–љ—Г—О –Ј–љ–∞—З–Є–Љ–Њ—Б—В—М –љ–∞—Б–µ–ї–µ–љ–љ—Л—Е –њ—Г–љ–Ї—В–Њ–≤. –Ь–µ—В–Њ–і–Є–Ї–∞ –≤–Ї–ї—О—З–∞–µ—В —А–µ–Ї–Њ–Љ–µ–љ–і–∞—Ж–Є–Є –њ–Њ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є—О –і–ї—П –њ–ї–∞–љ–Є—А–Њ–≤–∞–љ–Є—П –і–Њ—А–Њ–ґ–љ—Л—Е —А–∞–±–Њ—В –Є —А–∞–Ј—А–∞–±–Њ—В–Ї–Є –њ—А–Њ–≥—А–∞–Љ–Љ —А–∞–Ј–≤–Є—В–Є—П —В—А–∞–љ—Б–њ–Њ—А—В–љ–Њ–є –Є–љ—Д—А–∞—Б—В—А—Г–Ї—В—Г—А—Л.–Ш–Ј—Г—З–µ–љ–Є–µ –≤—Е–Њ–і–љ—Л—Е –њ–∞—А–∞–Љ–µ—В—А–Њ–≤ –і–ї—П –Њ–њ—В–Є–Љ–Є–Ј–∞—Ж–Є–Є —Ж–Є–Ї–ї–Њ–≤ —Б–≤–µ—В–Њ—Д–Њ—А–љ–Њ–≥–Њ —А–µ–≥—Г–ї–Є—А–Њ–≤–∞–љ–Є—П
–Ш–Ј—Г—З–µ–љ–Є–µ –≤—Е–Њ–і–љ—Л—Е –њ–∞—А–∞–Љ–µ—В—А–Њ–≤ –і–ї—П –Њ–њ—В–Є–Љ–Є–Ј–∞—Ж–Є–Є —Ж–Є–Ї–ї–Њ–≤ —Б–≤–µ—В–Њ—Д–Њ—А–љ–Њ–≥–Њ —А–µ–≥—Г–ї–Є—А–Њ–≤–∞–љ–Є—П–Р–ї–µ–Ї—Б–µ–є –С–Њ—А–Њ–≤—Б–Ї–Њ–є
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В —А–∞—Б—Б–Љ–∞—В—А–Є–≤–∞–µ—В –њ—А–Њ–±–ї–µ–Љ—Л –Є –Љ–µ—В–Њ–і—Л –Њ–њ—В–Є–Љ–Є–Ј–∞—Ж–Є–Є —Г–њ—А–∞–≤–ї–µ–љ–Є—П –і–Њ—А–Њ–ґ–љ—Л–Љ –і–≤–Є–ґ–µ–љ–Є–µ–Љ —Б –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ–Љ —Б–Њ–≤—А–µ–Љ–µ–љ–љ—Л—Е —В–µ—Е–љ–Њ–ї–Њ–≥–Є–є, –≤–Ї–ї—О—З–∞—П –∞–≤—В–Њ–Љ–∞—В–Є–Ј–Є—А–Њ–≤–∞–љ–љ—Л–µ —Б–Є—Б—В–µ–Љ—Л –Є –Є–љ—В–µ–ї–ї–µ–Ї—В—Г–∞–ї—М–љ—Л–µ —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л–µ —Б–Є—Б—В–µ–Љ—Л. –Т —З–∞—Б—В–љ–Њ—Б—В–Є, –Њ–±—Б—Г–ґ–і–∞–µ—В—Б—П –≤–ї–Є—П–љ–Є–µ –Ї–ї–Є–Љ–∞—В–Є—З–µ—Б–Ї–Є—Е —Г—Б–ї–Њ–≤–Є–є –љ–∞ —А–∞–±–Њ—В—Г —Б–≤–µ—В–Њ—Д–Њ—А–љ–Њ–≥–Њ —А–µ–≥—Г–ї–Є—А–Њ–≤–∞–љ–Є—П –Є –њ—А–µ–і–ї–∞–≥–∞–µ—В—Б—П –Њ–њ—В–Є–Љ–Є–Ј–∞—Ж–Є—П –µ–≥–Њ —А–µ–ґ–Є–Љ–Њ–≤ –і–ї—П –њ–Њ–≤—Л—И–µ–љ–Є—П —Н—Д—Д–µ–Ї—В–Є–≤–љ–Њ—Б—В–Є —В—А–∞–љ—Б–њ–Њ—А—В–љ–Њ–≥–Њ –њ–Њ—В–Њ–Ї–∞. –Ш—Б—Б–ї–µ–і–Њ–≤–∞–љ–Є–µ –≤—Л–≤–Њ–і–Є—В, —З—В–Њ —Б–Њ–Ї—А–∞—Й–µ–љ–Є–µ —Ж–Є–Ї–ї–Њ–≤ —А–µ–≥—Г–ї–Є—А–Њ–≤–∞–љ–Є—П –љ–∞ –Њ—Б–љ–Њ–≤–µ –Ї–ї–Є–Љ–∞—В–Є—З–µ—Б–Ї–Є—Е —Г—Б–ї–Њ–≤–Є–є –Љ–Њ–ґ–µ—В –Ј–љ–∞—З–Є—В–µ–ї—М–љ–Њ —Г–Љ–µ–љ—М—И–Є—В—М –Ј–∞–і–µ—А–ґ–Ї–Є, –Ї–Њ–ї–Є—З–µ—Б—В–≤–Њ –Њ—Б—В–∞–љ–Њ–≤–Њ–Ї –Є —А–∞—Б—Е–Њ–і —В–Њ–њ–ї–Є–≤–∞.–Є—Б—Б–ї–µ–і–Њ–≤–∞–љ–Є–µ –≥–µ–Њ–Љ–µ—В—А–Є–Є –њ–µ—А–µ—Б–µ—З–µ–љ–Є—П
–Є—Б—Б–ї–µ–і–Њ–≤–∞–љ–Є–µ –≥–µ–Њ–Љ–µ—В—А–Є–Є –њ–µ—А–µ—Б–µ—З–µ–љ–Є—П–Р–ї–µ–Ї—Б–µ–є –С–Њ—А–Њ–≤—Б–Ї–Њ–є
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В –њ—А–Њ—Ж–µ—Б—Б —Б–љ—П—В–Є—П —А–∞–Ј–Љ–µ—А–Њ–≤ –Є –њ–Њ—Б—В—А–Њ–µ–љ–Є—П —В–Њ–њ–Њ–ї–Њ–≥–Є–Є –њ–µ—А–µ–Ї—А–µ—Б—В–Ї–∞ –©–Њ—А—Б–∞-–Ъ–Њ—А–Њ–ї–µ–≤–∞ —Б –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ–Љ AutoCAD. –Т –љ–µ–Љ –њ—А–Є–≤–µ–і–µ–љ—Л —В–∞–±–ї–Є—Ж—Л —Б –Є–Ј–Љ–µ—А–µ–љ–Є—П–Љ–Є —А–∞—Б—Б—В–Њ—П–љ–Є–є –Љ–µ–ґ–і—Г –±–∞–Ј–Њ–≤—Л–Љ–Є —В–Њ—З–Ї–∞–Љ–Є –Є –Ї—А–∞—П–Љ–Є –њ—А–Њ–µ–Ј–ґ–µ–є —З–∞—Б—В–Є. –Ю—Б–љ–Њ–≤–љ–Њ–µ –≤–љ–Є–Љ–∞–љ–Є–µ —Г–і–µ–ї—П–µ—В—Б—П —В–Њ—З–љ–Њ—Б—В–Є –Є–Ј–Љ–µ—А–µ–љ–Є–є –Є –њ–Њ—Б—В—А–Њ–µ–љ–Є—О —А–∞–Ј–ї–Є—З–љ—Л—Е —Н–ї–µ–Љ–µ–љ—В–Њ–≤ –њ—А–Њ–µ–Ї—В–Є—А–Њ–≤–∞–љ–Є—П.–Я—А–µ–Ј–µ–љ—В–∞—Ж–Є—П
–Я—А–µ–Ј–µ–љ—В–∞—Ж–Є—П–Р–ї–µ–Ї—Б–µ–є –С–Њ—А–Њ–≤—Б–Ї–Њ–є
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В –њ—А–Њ—Ж–µ—Б—Б –њ–Њ—Б—В—А–Њ–µ–љ–Є—П —Б—Г—Й–µ—Б—В–≤—Г—О—Й–µ–є —В–Њ–њ–Њ–ї–Њ–≥–Є–Є –њ–µ—А–µ—Б–µ—З–µ–љ–Є—П —Г–ї–Є—Ж –Ъ–Њ—А–Њ–ї–µ–≤–∞ –Є –©–Њ—А—Б–∞ –≤ –≥–Њ—А–Њ–і–µ –С–µ–ї–≥–Њ—А–Њ–і. –Ю—Б–љ–Њ–≤–љ—Л–µ —Ж–µ–ї–Є –≤–Ї–ї—О—З–∞—О—В —Б–љ—П—В–Є–µ —А–∞–Ј–Љ–µ—А–Њ–≤ –њ–µ—А–µ–Ї—А–µ—Б—В–Ї–∞ –Є —Б–Њ–Ј–і–∞–љ–Є–µ —Б—Е–µ–Љ—Л –≤ AutoCAD —Б –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ–Љ –ї–∞–Ј–µ—А–љ–Њ–≥–Њ –і–∞–ї—М–љ–Њ–Љ–µ—А–∞ –Є –љ–∞–≤–Є–≥–∞—В–Њ—А–∞. –Ф–Њ–Ї—Г–Љ–µ–љ—В —В–∞–Ї–ґ–µ —Б–Њ–і–µ—А–ґ–Є—В –Є–љ—Б—В—А—Г–Ї—Ж–Є–Є –њ–Њ –≤—Л–±–Њ—А—Г –±–∞–Ј–Њ–≤—Л—Е —В–Њ—З–µ–Ї –Є –Ј–∞–њ–Є—Б–Є –Є–Ј–Љ–µ—А–µ–љ–љ—Л—Е —А–∞—Б—Б—В–Њ—П–љ–Є–є.–Ш—Б—Б–ї–µ–і–Њ–≤–∞–љ–Є–µ –Є–љ—В–µ–љ—Б–Є–≤–љ–Њ—Б—В–Є–њ–Њ—В–Њ–Ї–∞
–Ш—Б—Б–ї–µ–і–Њ–≤–∞–љ–Є–µ –Є–љ—В–µ–љ—Б–Є–≤–љ–Њ—Б—В–Є–њ–Њ—В–Њ–Ї–∞–Р–ї–µ–Ї—Б–µ–є –С–Њ—А–Њ–≤—Б–Ї–Њ–є
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В –Љ–µ—В–Њ–і–Є–Ї—Г –Њ–±—Б–ї–µ–і–Њ–≤–∞–љ–Є—П –Є–љ—В–µ–љ—Б–Є–≤–љ–Њ—Б—В–Є –Є —Б—В—А—Г–Ї—В—Г—А—Л —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е –њ–Њ—В–Њ–Ї–Њ–≤, –≤–Ї–ї—О—З–∞—П –Њ—Б–љ–Њ–≤–љ—Л–µ –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П, —Б—Е–µ–Љ—Л —А–∞–Ј–Љ–µ—Й–µ–љ–Є—П —Г—З–µ—В–љ—Л—Е –њ–Њ—Б—В–Њ–≤, –Ї–ї–∞—Б—Б–Є—Д–Є–Ї–∞—Ж–Є—О –Љ–∞–≥–Є—Б—В—А–∞–ї–µ–є –Є –Ї–∞—А—В–Њ–≥—А–∞–Љ–Љ—Л. –Ш–љ—В–µ–љ—Б–Є–≤–љ–Њ—Б—В—М –і–≤–Є–ґ–µ–љ–Є—П –Њ–њ—А–µ–і–µ–ї—П–µ—В—Б—П –Ї–Њ–ї–Є—З–µ—Б—В–≤–Њ–Љ —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —Б—А–µ–і—Б—В–≤, –њ—А–Њ—Е–Њ–і—П—Й–Є—Е —З–µ—А–µ–Ј —Б–µ—З–µ–љ–Є–µ –≤ –µ–і–Є–љ–Є—Ж—Г –≤—А–µ–Љ–µ–љ–Є, –Є –Ї–ї–∞—Б—Б–Є—Д–Є–Ї–∞—Ж–Є—П –і–µ–ї–Є—В –Љ–∞–≥–Є—Б—В—А–∞–ї–Є –њ–Њ —В–Є–њ—Г –і–≤–Є–ґ–µ–љ–Є—П. –Ґ–∞–Ї–ґ–µ –њ—А–µ–і—Б—В–∞–≤–ї–µ–љ—Л —Д–Њ—А–Љ—Л –±–ї–∞–љ–Ї–Њ–≤ –Њ–±—Б–ї–µ–і–Њ–≤–∞–љ–Є–є –Є –Ї–∞—А—В–Њ–≥—А–∞–Љ–Љ—Л –і–ї—П –∞–љ–∞–ї–Є–Ј–∞ —З–∞—Б–Њ–≤–Њ–є –Є–љ—В–µ–љ—Б–Є–≤–љ–Њ—Б—В–Є –Є —Б—В—А—Г–Ї—В—Г—А—Л –њ–Њ—В–Њ–Ї–Њ–≤.Park cad1
Park cad1–Р–ї–µ–Ї—Б–µ–є –С–Њ—А–Њ–≤—Б–Ї–Њ–є
ћэ
Parkcad –∞–≤—В–Њ–Љ–∞—В–Є–Ј–Є—А—Г–µ—В –њ–ї–∞–љ–Є—А–Њ–≤–∞–љ–Є–µ –Є –њ—А–Њ–µ–Ї—В–Є—А–Њ–≤–∞–љ–Є–µ –њ–∞—А–Ї–Њ–≤–Њ–Ї, —Г—З–Є—В—Л–≤–∞—П —А–∞–Ј–ї–Є—З–љ—Л–µ –њ–∞—А–∞–Љ–µ—В—А—Л –і–ї—П –Њ–њ—В–Є–Љ–Є–Ј–∞—Ж–Є–Є —А–∞—Б–њ–Њ–ї–Њ–ґ–µ–љ–Є—П —Б—В–Њ—П–љ–Ї–Є. –Я—А–Њ–≥—А–∞–Љ–Љ–∞ —В–∞–Ї–ґ–µ —А–∞—Б—Б—З–Є—В—Л–≤–∞–µ—В –Љ–∞–Ї—Б–Є–Љ–∞–ї—М–љ—Г—О –≤–Љ–µ—Б—В–Є–Љ–Њ—Б—В—М –Є —Б–Њ–Ј–і–∞–µ—В –Ј–µ–ї–µ–љ—Л–µ –Ј–Њ–љ—Л, –Љ–Є–љ–Є–Љ–Є–Ј–Є—А—Г—П —А–∞–Ј–Љ–µ—А—Л –њ–∞—А–Ї–Њ–≤–Њ—З–љ—Л—Е –Љ–µ—Б—В. –Т –і–Њ–Ї—Г–Љ–µ–љ—В–µ –њ—А–µ–і—Б—В–∞–≤–ї–µ–љ—Л —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї–∞ –Є —Б—В–∞–љ–і–∞—А—В—Л, –Ї–Њ—В–Њ—А—Л–µ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ —Г—З–Є—В—Л–≤–∞—В—М –њ—А–Є –њ—А–Њ–µ–Ї—В–Є—А–Њ–≤–∞–љ–Є–Є –њ–∞—А–Ї–Њ–≤–Њ–Ї.–§–Њ—А–Љ—Л –і–ї—П –њ—А–Њ–≤–µ–і–µ–љ–Є—П –Њ–±—Б–ї–µ–і–Њ–≤–∞–љ–Є—П —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї –Ґ–Я
–§–Њ—А–Љ—Л –і–ї—П –њ—А–Њ–≤–µ–і–µ–љ–Є—П –Њ–±—Б–ї–µ–і–Њ–≤–∞–љ–Є—П —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї –Ґ–Я–Р–ї–µ–Ї—Б–µ–є –С–Њ—А–Њ–≤—Б–Ї–Њ–є
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В –Љ–µ—В–Њ–і—Л –Є —Б—Е–µ–Љ—Л –Њ–±—Б–ї–µ–і–Њ–≤–∞–љ–Є—П –Є–љ—В–µ–љ—Б–Є–≤–љ–Њ—Б—В–Є —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е –њ–Њ—В–Њ–Ї–Њ–≤ –љ–∞ –Љ–∞–≥–Є—Б—В—А–∞–ї—П—Е –Є –њ–µ—А–µ–Ї—А–µ—Б—В–Ї–∞—Е. –Ю–љ –≤–Ї–ї—О—З–∞–µ—В –Њ—Б–љ–Њ–≤–љ—Л–µ –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П, –Ї–ї–∞—Б—Б–Є—Д–Є–Ї–∞—Ж–Є—О –Љ–∞–≥–Є—Б—В—А–∞–ї–µ–є –њ–Њ —Б—В—А—Г–Ї—В—Г—А–µ –њ–Њ—В–Њ–Ї–Њ–≤ –Є –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ –Ї–Њ—Н—Д—Д–Є—Ж–Є–µ–љ—В–Њ–≤ –њ—А–Є–≤–µ–і–µ–љ–Є—П –і–ї—П —А–∞–Ј–ї–Є—З–љ—Л—Е –≤–Є–і–Њ–≤ —В—А–∞–љ—Б–њ–Њ—А—В–∞. –Ґ–∞–Ї–ґ–µ –њ—А–µ–і—Б—В–∞–≤–ї–µ–љ—Л —Д–Њ—А–Љ—Л –і–ї—П —Г—З–µ—В–∞ –Є–љ—В–µ–љ—Б–Є–≤–љ–Њ—Б—В–Є –Є —Б—В—А—Г–Ї—В—Г—А—Л —Н—В–Є—Е –њ–Њ—В–Њ–Ї–Њ–≤, –∞ —В–∞–Ї–ґ–µ –і—А–Њ–±–ї–µ–љ–Є–µ –љ–∞ –љ–∞—В—Г—А–∞–ї—М–љ—Л–µ –Є –њ—А–Є–≤–µ–і–µ–љ–љ—Л–µ –µ–і–Є–љ–Є—Ж—Л.—Е–µ–ї–њ
—Е–µ–ї–њ–Р–ї–µ–Ї—Б–µ–є –С–Њ—А–Њ–≤—Б–Ї–Њ–є
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –Њ–њ–Є—Б—Л–≤–∞–µ—В –њ—А–Њ—Ж–µ—Б—Б –њ–Њ–і–≥–Њ—В–Њ–≤–Ї–Є –і–∞–љ–љ—Л—Е –і–ї—П –њ–Њ—Б—В—А–Њ–µ–љ–Є—П –Њ—Б–µ–≤–Њ–є –ї–Є–љ–Є–Є —Г–ї–Є—Ж—Л —Б –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ–Љ –Ї–Њ–Њ—А–і–Є–љ–∞—В –Ї–Њ–љ—В—А–Њ–ї—М–љ—Л—Е —В–Њ—З–µ–Ї, –њ–Њ–ї—Г—З–µ–љ–љ—Л—Е –Є–Ј Google –Я–ї–∞–љ–µ—В–∞ –Ч–µ–Љ–ї—П. –Ю–љ –≤–Ї–ї—О—З–∞–µ—В –њ–Њ—И–∞–≥–Њ–≤—Г—О –Є–љ—Б—В—А—Г–Ї—Ж–Є—О –њ–Њ —Б–Њ–Ј–і–∞–љ–Є—О –Є —Б–Њ—Е—А–∞–љ–µ–љ–Є—О —Д–∞–є–ї–∞ —Б –Ї–Њ–Њ—А–і–Є–љ–∞—В–∞–Љ–Є, –љ–∞—Б—В—А–Њ–є–Ї—Г —Б–Є—Б—В–µ–Љ—Л –Ї–Њ–Њ—А–і–Є–љ–∞—В –≤ AutoCAD Map 3D –Є –Є–Љ–њ–Њ—А—В –і–∞–љ–љ—Л—Е. –Т –Ї–Њ–љ–µ—З–љ–Њ–Љ –Є—В–Њ–≥–µ, —Б–Њ–Ј–і–∞—О—В—Б—П –Њ–±–ї–∞–Ї–∞ —В–Њ—З–µ–Ї –Є —Ж–µ–љ—В—А–∞–ї—М–љ–∞—П –ї–Є–љ–Є—П —Г–ї–Є—Ж—Л —Б –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ–Љ –Є–љ—Б—В—А—Г–Љ–µ–љ—В–Њ–≤ AutoCAD.–Њ–њ–Є—Б–∞–љ–Є–µ –њ—А–Њ–≥—А–∞–Љ–Љ—Л Car test 2000
–Њ–њ–Є—Б–∞–љ–Є–µ –њ—А–Њ–≥—А–∞–Љ–Љ—Л Car test 2000–Р–ї–µ–Ї—Б–µ–є –С–Њ—А–Њ–≤—Б–Ї–Њ–є
ћэ
Cartest 2000 - –њ—А–Њ–≥—А–∞–Љ–Љ–∞ –і–ї—П –Ї–Њ–Љ–њ—М—О—В–µ—А–љ–Њ–≥–Њ –Љ–Њ–і–µ–ї–Є—А–Њ–≤–∞–љ–Є—П —Г—Б–Ї–Њ—А–µ–љ–Є—П –∞–≤—В–Њ–Љ–Њ–±–Є–ї–µ–є, –њ–Њ–Ј–≤–Њ–ї—П—О—Й–∞—П –∞–љ–∞–ї–Є–Ј–Є—А–Њ–≤–∞—В—М –і–Є–љ–∞–Љ–Є—З–µ—Б–Ї–Є–µ —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї–Є —А–∞–Ј–ї–Є—З–љ—Л—Е —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —Б—А–µ–і—Б—В–≤ –љ–∞ –Њ—Б–љ–Њ–≤–µ –Є—Е –њ–∞—А–∞–Љ–µ—В—А–Њ–≤. –Ю–љ–∞ –Њ–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В –Њ–±—К–µ–Ї—В–Є–≤–љ—Г—О –Њ—Ж–µ–љ–Ї—Г —А–∞–±–Њ—В—Л –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П —Б —Г—З–µ—В–Њ–Љ —А–∞–Ј–ї–Є—З–љ—Л—Е —Д–∞–Ї—В–Њ—А–Њ–≤, —В–∞–Ї–Є—Е –Ї–∞–Ї –≤–µ—Б, –њ–µ—А–µ–і–∞—В–Њ—З–љ—Л–µ —З–Є—Б–ї–∞ –Є —Г—Б–ї–Њ–≤–Є—П –Є—Б–њ—Л—В–∞–љ–Є–є. –Я—А–Њ–≥—А–∞–Љ–Љ–∞ –њ—А–µ–і–ї–∞–≥–∞–µ—В —А–∞–Ј–љ–Њ–Њ–±—А–∞–Ј–љ—Л–µ —В–µ—Б—В—Л –і–ї—П –Њ—Ж–µ–љ–Ї–Є –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї—М–љ–Њ—Б—В–Є –Є –Љ–Њ–ґ–µ—В –±—Л—В—М –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–∞ –Ї–∞–Ї –Њ–±—А–∞–Ј–Њ–≤–∞—В–µ–ї—М–љ—Л–є –Є–љ—Б—В—А—Г–Љ–µ–љ—В.–Я—А–µ–Ј–µ–љ—В–∞—Ж–Є—П –і–ї—П 3 –Є 4 –Ї—Г—А—Б–∞
–Я—А–µ–Ј–µ–љ—В–∞—Ж–Є—П –і–ї—П 3 –Є 4 –Ї—Г—А—Б–∞–Р–ї–µ–Ї—Б–µ–є –С–Њ—А–Њ–≤—Б–Ї–Њ–є
ћэ
–Ф–Њ–Ї—Г–Љ–µ–љ—В –њ—А–µ–і—Б—В–∞–≤–ї—П–µ—В —Б–Њ–±–Њ–є —А—Г–Ї–Њ–≤–Њ–і—Б—В–≤–Њ –њ–Њ –Є—Б—Б–ї–µ–і–Њ–≤–∞–љ–Є—О –Є –Њ–њ—В–Є–Љ–Є–Ј–∞—Ж–Є–Є —А–∞–±–Њ—В—Л —Б–≤–µ—В–Њ—Д–Њ—А–љ—Л—Е —Б–Є—Б—В–µ–Љ –љ–∞ –њ–µ—А–µ–Ї—А–µ—Б—В–Ї–∞—Е. –Ю–љ –Њ–њ–Є—Б—Л–≤–∞–µ—В –Њ—Б–љ–Њ–≤–љ—Л–µ —В–µ—А–Љ–Є–љ—Л, –њ—А–Њ—Ж–µ–і—Г—А—Л –Є–Ј–Љ–µ—А–µ–љ–Є—П –Є–љ—В–µ–љ—Б–Є–≤–љ–Њ—Б—В–Є –і–≤–Є–ґ–µ–љ–Є—П, –∞ —В–∞–Ї–ґ–µ –њ—А–Є–Љ–µ–љ–µ–љ–Є–µ —Б–њ–µ—Ж–Є–∞–ї–Є–Ј–Є—А–Њ–≤–∞–љ–љ–Њ–є –њ—А–Њ–≥—А–∞–Љ–Љ—Л transyt-7fr –і–ї—П –Љ–Њ–і–µ–ї–Є—А–Њ–≤–∞–љ–Є—П –Є –Њ–њ—В–Є–Љ–Є–Ј–∞—Ж–Є–Є —Г–њ—А–∞–≤–ї–µ–љ–Є—П —Б–Є–≥–љ–∞–ї–∞–Љ–Є —Б–≤–µ—В–Њ—Д–Њ—А–Њ–≤. –Я—А–Є–≤–µ–і–µ–љ—Л –њ—А–Є–Љ–µ—А—Л —А–∞—Б—З–µ—В–∞ –Є –љ–∞—Б—В—А–Њ–є–Ї–Є –њ–∞—А–∞–Љ–µ—В—А–Њ–≤ —А–µ–≥—Г–ї–Є—А–Њ–≤–∞–љ–Є—П –љ–∞ –Ї–Њ–љ–Ї—А–µ—В–љ–Њ–Љ –њ–µ—А–µ–Ї—А–µ—Б—В–Ї–µ.–≠–Ї–Ј–∞–Љ–µ–љ–∞—Ж–Є–Њ–љ–љ—Л–µ –≤–Њ–њ—А–Њ—Б—Л –Є—В 4 –Ї—Г—А—Б 2011 –≥–Њ–і
–≠–Ї–Ј–∞–Љ–µ–љ–∞—Ж–Є–Њ–љ–љ—Л–µ –≤–Њ–њ—А–Њ—Б—Л –Є—В 4 –Ї—Г—А—Б 2011 –≥–Њ–і–Р–ї–µ–Ї—Б–µ–є –С–Њ—А–Њ–≤—Б–Ї–Њ–є
ћэ
–†–£–Ъ–Ю–Т–Ю–Ф–°–Ґ–Т–Ю –Я–Ю –Я–†–Ю–У–Э–Ю–Ч–Ш–†–Ю–Т–Р–Э–Ш–Ѓ –Ш–Э–Ґ–Х–Э–°–Ш–Т–Э–Ю–°–Ґ–Ш –Ф–Т–Ш–Ц–Х–Э–Ш–ѓ –Э–Р –Р–Т–Ґ–Ю–Ь–Ю–С–Ш–Ы–ђ–Э–Ђ–• –Ф–Ю–†–Ю–У–Р–•
–†–£–Ъ–Ю–Т–Ю–Ф–°–Ґ–Т–Ю –Я–Ю –Я–†–Ю–У–Э–Ю–Ч–Ш–†–Ю–Т–Р–Э–Ш–Ѓ –Ш–Э–Ґ–Х–Э–°–Ш–Т–Э–Ю–°–Ґ–Ш –Ф–Т–Ш–Ц–Х–Э–Ш–ѓ –Э–Р –Р–Т–Ґ–Ю–Ь–Ю–С–Ш–Ы–ђ–Э–Ђ–• –Ф–Ю–†–Ю–У–Р–•–Р–ї–µ–Ї—Б–µ–є –С–Њ—А–Њ–≤—Б–Ї–Њ–є
ћэ
–Ш–Ј—Г—З–µ–љ–Є–µ –≤—Е–Њ–і–љ—Л—Е –њ–∞—А–∞–Љ–µ—В—А–Њ–≤ –і–ї—П –Њ–њ—В–Є–Љ–Є–Ј–∞—Ж–Є–Є —Ж–Є–Ї–ї–Њ–≤ —Б–≤–µ—В–Њ—Д–Њ—А–љ–Њ–≥–Њ —А–µ–≥—Г–ї–Є—А–Њ–≤–∞–љ–Є—П
–Ш–Ј—Г—З–µ–љ–Є–µ –≤—Е–Њ–і–љ—Л—Е –њ–∞—А–∞–Љ–µ—В—А–Њ–≤ –і–ї—П –Њ–њ—В–Є–Љ–Є–Ј–∞—Ж–Є–Є —Ж–Є–Ї–ї–Њ–≤ —Б–≤–µ—В–Њ—Д–Њ—А–љ–Њ–≥–Њ —А–µ–≥—Г–ї–Є—А–Њ–≤–∞–љ–Є—П–Р–ї–µ–Ї—Б–µ–є –С–Њ—А–Њ–≤—Б–Ї–Њ–є
ћэ
–Є—Б—Б–ї–µ–і–Њ–≤–∞–љ–Є–µ –≥–µ–Њ–Љ–µ—В—А–Є–Є –њ–µ—А–µ—Б–µ—З–µ–љ–Є—П
–Є—Б—Б–ї–µ–і–Њ–≤–∞–љ–Є–µ –≥–µ–Њ–Љ–µ—В—А–Є–Є –њ–µ—А–µ—Б–µ—З–µ–љ–Є—П–Р–ї–µ–Ї—Б–µ–є –С–Њ—А–Њ–≤—Б–Ї–Њ–є
ћэ
–§–Њ—А–Љ—Л –і–ї—П –њ—А–Њ–≤–µ–і–µ–љ–Є—П –Њ–±—Б–ї–µ–і–Њ–≤–∞–љ–Є—П —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї –Ґ–Я
–§–Њ—А–Љ—Л –і–ї—П –њ—А–Њ–≤–µ–і–µ–љ–Є—П –Њ–±—Б–ї–µ–і–Њ–≤–∞–љ–Є—П —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї –Ґ–Я–Р–ї–µ–Ї—Б–µ–є –С–Њ—А–Њ–≤—Б–Ї–Њ–є
ћэ
Ad
–Я—А–µ–Ј–µ–љ—В–∞—Ж–Є—П –њ–Њ –і–µ—В–µ–Ї—В–Њ—А–∞–Љ —В—А–∞–љ—Б–њ–Њ—А—В–∞
- 1. –°–С–Ю–† –•–Р–†–Р–Ъ–Ґ–Х–†–Ш–°–Ґ–Ш–Ъ –Ґ–†–Р–Э–°–Я–Ю–†–Ґ–Э–Ђ–• –Я–Ю–Ґ–Ю–Ъ–Ю–Т –¶–Х–Ы–Ш –Ш –Ч–Р–Ф–Р–І–Ш: 1) –Є–Ј—Г—З–µ–љ–Є–µ –љ—Л–љ–µ—И–љ–µ–є —Б–Є—В—Г–∞—Ж–Є–Є –љ–∞ –£–Ф–°; 2) —А–µ–Ї–Њ–љ—Б—В—А—Г–Ї—Ж–Є—П –£–Ф–°; 3) –Њ–њ—В–Є–Љ–Є–Ј–∞—Ж–Є—П —А–∞–±–Њ—В—Л –Р–°–£–Ф–Ф –≥–Њ—А–Њ–і–∞; 4) –њ—А–Є–Љ–µ–љ–µ–љ–Є–µ –і–∞–љ–љ—Л—Е –≤ –Я–Ю Aimsun –Є Transyt-7FR.
- 2. –°–Я–Ю–°–Ю–С–Ђ –°–С–Ю–†–Р –•–Р–†–Р–Ъ–Ґ–Х–†–Ш–°–Ґ–Ш–Ъ –Ґ–Я 1) –њ—А–Є–Љ–µ–љ–µ–љ–Є–µ –љ–∞—В—Г—А–љ—Л—Е –Є—Б—Б–ї–µ–і–Њ–≤–∞–љ–Є–є; 2) –≤–Є–і–µ–Њ-—Д–Є–Ї—Б–∞—В–Њ—А—Л; 3) —А–∞–і–∞—А-–і–µ—В–µ–Ї—В–Њ—А—Л;
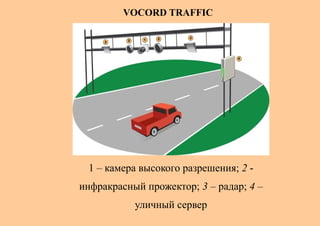
- 3. VOCORD TRAFFIC 1 вАУ –Ї–∞–Љ–µ—А–∞ –≤—Л—Б–Њ–Ї–Њ–≥–Њ —А–∞–Ј—А–µ—И–µ–љ–Є—П; 2 - –Є–љ—Д—А–∞–Ї—А–∞—Б–љ—Л–є –њ—А–Њ–ґ–µ–Ї—В–Њ—А; 3 вАУ —А–∞–і–∞—А; 4 вАУ —Г–ї–Є—З–љ—Л–є —Б–µ—А–≤–µ—А
- 4. –Я—А–Њ–і—Г–Ї—В –Ї–Њ–Љ–њ–∞–љ–Є–Є ¬Ђ–Т–Њ–Ї–Њ—А–і¬ї –≤—Л–њ–Њ–ї–љ—П–µ—В —Б–ї–µ–і—Г—О—Й–Є–µ —Д—Г–љ–Ї—Ж–Є–Є: вИТ –Ї–ї–∞—Б—Б–Є—Д–Є–Ї–∞—Ж–Є—П —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —Б—А–µ–і—Б—В–≤ (–ї–µ–≥–Ї–Њ–≤–Њ–є, –≥—А—Г–Ј–Њ–≤–Њ–є, –∞–≤—В–Њ–±—Г—Б); вИТ –њ–Њ–і—Б—З—С—В —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —Б—А–µ–і—Б—В–≤; вИТ –Њ–њ—А–µ–і–µ–ї–µ–љ–Є–µ —Б–Ї–Њ—А–Њ—Б—В–Є –і–≤–Є–ґ–µ–љ–Є—П; вИТ –Њ–њ—А–µ–і–µ–ї–µ–љ–Є–µ –њ—А–Є—Б—Г—В—Б—В–≤–Є—П —В—А–∞–љ—Б–њ–Њ—А—В–љ–Њ–≥–Њ —Б—А–µ–і—Б—В–≤–∞; вИТ –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥ –і–Њ—А–Њ–ґ–љ–Њ–є –Њ–±—Б—В–∞–љ–Њ–≤–Ї–Є –≤ —А–µ–∞–ї—М–љ–Њ–Љ –≤—А–µ–Љ–µ–љ–Є; вИТ —Б–Њ—Е—А–∞–љ–µ–љ–Є–µ –і–∞–љ–љ—Л—Е (—Б–љ–Є–Љ–Ї–Њ–≤) –≤ –∞—А—Е–Є–≤–µ; вИТ –∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–∞—П –≥–µ–љ–µ—А–∞—Ж–Є—П —Б—В–∞—В–Є—Б—В–Є—З–µ—Б–Ї–Є—Е –Њ—В—З–µ—В–Њ–≤ –і–ї—П –∞–љ–∞–ї–Є–Ј–∞ —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е –њ–Њ—В–Њ–Ї–Њ–≤.
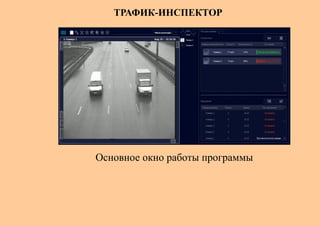
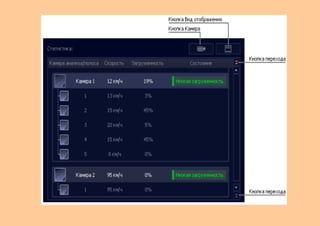
- 5. –Ґ–†–Р–§–Ш–Ъ-–Ш–Э–°–Я–Х–Ъ–Ґ–Ю–† –Ю—Б–љ–Њ–≤–љ–Њ–µ –Њ–Ї–љ–Њ —А–∞–±–Њ—В—Л –њ—А–Њ–≥—А–∞–Љ–Љ—Л
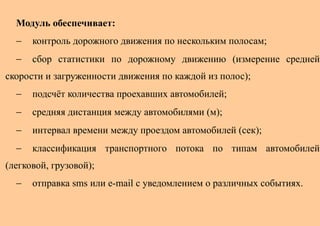
- 6. –Ь–Њ–і—Г–ї—М –Њ–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В: вИТ –Ї–Њ–љ—В—А–Њ–ї—М –і–Њ—А–Њ–ґ–љ–Њ–≥–Њ –і–≤–Є–ґ–µ–љ–Є—П –њ–Њ –љ–µ—Б–Ї–Њ–ї—М–Ї–Є–Љ –њ–Њ–ї–Њ—Б–∞–Љ; вИТ —Б–±–Њ—А —Б—В–∞—В–Є—Б—В–Є–Ї–Є –њ–Њ –і–Њ—А–Њ–ґ–љ–Њ–Љ—Г –і–≤–Є–ґ–µ–љ–Є—О (–Є–Ј–Љ–µ—А–µ–љ–Є–µ —Б—А–µ–і–љ–µ–є —Б–Ї–Њ—А–Њ—Б—В–Є –Є –Ј–∞–≥—А—Г–ґ–µ–љ–љ–Њ—Б—В–Є –і–≤–Є–ґ–µ–љ–Є—П –њ–Њ –Ї–∞–ґ–і–Њ–є –Є–Ј –њ–Њ–ї–Њ—Б); вИТ –њ–Њ–і—Б—З—С—В –Ї–Њ–ї–Є—З–µ—Б—В–≤–∞ –њ—А–Њ–µ—Е–∞–≤—И–Є—Е –∞–≤—В–Њ–Љ–Њ–±–Є–ї–µ–є; вИТ —Б—А–µ–і–љ—П—П –і–Є—Б—В–∞–љ—Ж–Є—П –Љ–µ–ґ–і—Г –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П–Љ–Є (–Љ); вИТ –Є–љ—В–µ—А–≤–∞–ї –≤—А–µ–Љ–µ–љ–Є –Љ–µ–ґ–і—Г –њ—А–Њ–µ–Ј–і–Њ–Љ –∞–≤—В–Њ–Љ–Њ–±–Є–ї–µ–є (—Б–µ–Ї); вИТ –Ї–ї–∞—Б—Б–Є—Д–Є–Ї–∞—Ж–Є—П —В—А–∞–љ—Б–њ–Њ—А—В–љ–Њ–≥–Њ –њ–Њ—В–Њ–Ї–∞ –њ–Њ —В–Є–њ–∞–Љ –∞–≤—В–Њ–Љ–Њ–±–Є–ї–µ–є (–ї–µ–≥–Ї–Њ–≤–Њ–є, –≥—А—Г–Ј–Њ–≤–Њ–є); вИТ –Њ—В–њ—А–∞–≤–Ї–∞ sms –Є–ї–Є e-mail —Б —Г–≤–µ–і–Њ–Љ–ї–µ–љ–Є–µ–Љ –Њ —А–∞–Ј–ї–Є—З–љ—Л—Е —Б–Њ–±—Л—В–Є—П—Е.
- 9. RTMS G4 –•–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї–Є –і–∞—В—З–Є–Ї–∞: –Я–ї–Њ—Й–∞–і—М –њ–Њ–Ї—А—Л—В–Є—П –†–∞–Ј—А–µ—И–µ–љ–Є–µ –і–∞—В—З–Є–Ї–∞ –£–≥–ї–Њ–Љ –ї—Г—З–∞ –≤ –≤–µ—А—В–Є–Ї–∞–ї—М–љ–Њ–є –£–≥–ї–Њ–Љ –ї—Г—З–∞ –≤ –Ъ–Њ–ї–Є—З–µ—Б—В–≤–Њ –£–≤–µ–ї–Є—З–µ–љ–Є–µ –®–Є—А–Є–љ–∞ –Т—А–µ–Љ—П –њ–ї–Њ—Б–Ї–Њ—Б—В–Є –≥–Њ—А–Є–Ј–Њ–љ—В–∞–ї—М–љ–Њ–є –њ–Њ–ї–Њ—Б –Є–ї–Є –њ–Њ–ї–Њ—Б—Л –і–Є—Б–Ї—А–µ—В–Є–Ј–∞—Ж –њ–ї–Њ—Б–Ї–Њ—Б—В–Є –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П —Г–Љ–µ–љ—М—И–µ–љ–Є–µ –Є–Є —В—А–∞–љ—Б–њ–Њ—А—В–∞ –њ–Њ–ї–Њ—Б—Л 50 –≥—А–∞–і—Г—Б–Њ–≤ 12 –≥—А–∞–і—Г—Б–Њ–≤ –і–Њ 12 0,4 –Љ. –Њ—В 2 –і–Њ 7 –Љ. 1,3 –Љ—Б–µ–Ї. –Ш–љ—В–µ—А—Д–µ–є—Б –Я–µ—А–µ–і–∞—З–∞ –і–∞–љ–љ—Л—Е –Я–Њ—А—В RS-232/RS-485 TCP/IP, GPRS, CDMA, —А–∞–і–Є–Њ-–Љ–Њ–і–µ–Љ
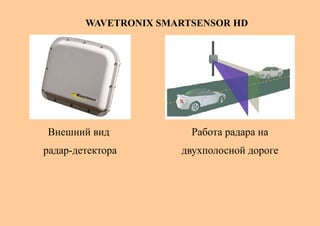
- 10. WAVETRONIX SMARTSENSOR HD –Т–љ–µ—И–љ–Є–є –≤–Є–і –†–∞–±–Њ—В–∞ —А–∞–і–∞—А–∞ –љ–∞ —А–∞–і–∞—А-–і–µ—В–µ–Ї—В–Њ—А–∞ –і–≤—Г—Е–њ–Њ–ї–Њ—Б–љ–Њ–є –і–Њ—А–Њ–≥–µ
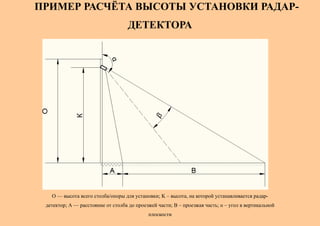
- 11. –Я–†–Ш–Ь–Х–† –†–Р–°–І–Б–Ґ–Р –Т–Ђ–°–Ю–Ґ–Ђ –£–°–Ґ–Р–Э–Ю–Т–Ъ–Ш –†–Р–Ф–Р–†- –Ф–Х–Ґ–Х–Ъ–Ґ–Ю–†–Р –Ю вАФ –≤—Л—Б–Њ—В–∞ –≤—Б–µ–≥–Њ —Б—В–Њ–ї–±–∞/–Њ–њ–Њ—А—Л –і–ї—П —Г—Б—В–∞–љ–Њ–≤–Ї–Є; K вАУ –≤—Л—Б–Њ—В–∞, –љ–∞ –Ї–Њ—В–Њ—А–Њ–є —Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞–µ—В—Б—П —А–∞–і–∞—А- –і–µ—В–µ–Ї—В–Њ—А; –Р вАФ —А–∞—Б—Б—В–Њ—П–љ–Є–µ –Њ—В —Б—В–Њ–ї–±–∞ –і–Њ –њ—А–Њ–µ–Ј–ґ–µ–є —З–∞—Б—В–Є; B вАУ –њ—А–Њ–µ–Ј–ґ–∞—П —З–∞—Б—В—М; ќ± вАУ —Г–≥–Њ–ї –≤ –≤–µ—А—В–Є–Ї–∞–ї—М–љ–Њ–є –њ–ї–Њ—Б–Ї–Њ—Б—В–Є
- 12. –Я–†–Ш–Ь–Х–† –Ф–Х–Ґ–Х–Ъ–Ґ–Ю–†–Ю–Т, –Ч–Р–Ъ–£–Я–Ы–Х–Э–Э–Ђ–• –Ф–Ы–ѓ –≥. –С–Х–Ы–У–Ю–†–Ю–Ф–Р