3次元厂尝础惭は谁でもできるよ。そう、罢齿2と罢耻谤迟濒别叠辞迟3ならね。
Download as pptx, pdf8 likes8,154 views

NVIDIA Jetson プラットフォーム Meet-up #08 にて発表 発表者: 田中 義丸 (東京大学/ロボティズ?学生インターン) アッフォンソ ギリェルメ(東京大学/ロボティズ?学生アシスタント)



















![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=560&fit=bounds)


















More Related Content
What's hot (20)
Similar to 3次元厂尝础惭は谁でもできるよ。そう、罢齿2と罢耻谤迟濒别叠辞迟3ならね。 (17)








![[DL輪読会]BADGR: An Autonomous Self-Supervised Learning-Based Navigation System](https://cdn.slidesharecdn.com/ss_thumbnails/20200403rindokukai-200403043041-thumbnail.jpg?width=560&fit=bounds)
![[DL輪読会]Differentiable Mapping Networks: Learning Structured Map Representatio...](https://cdn.slidesharecdn.com/ss_thumbnails/differentiablemappingnetworks-200707033539-thumbnail.jpg?width=560&fit=bounds)





More from ROBOTIS Japan (8)








Recently uploaded (6)






3次元厂尝础惭は谁でもできるよ。そう、罢齿2と罢耻谤迟濒别叠辞迟3ならね。
- 2. 目次 1. TurtleBot3 (TB3) - ROS公式研究用移動台車型ロボットプラットフォーム 2. 3次元SLAM 3. TurtleBot3 Monster 4. ソフトウェア構成 5. 3次元地図生成と自律移动デモ
- 4. X
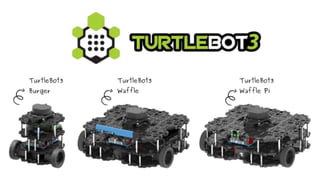
- 5. TurtleBot3 (TB3) ROS公式 研究用移動台車型ロボットプラットフォーム - 対向2輪型移動台車 - OpenCR (マイコンボード) - Raspberry Pi - 360度全方位走査型LIDAR(レーザーレンジファインダ) SLAMを実行するための最低限の構成
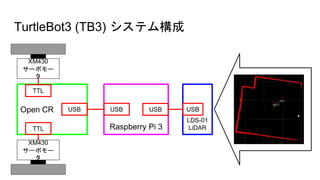
- 8. TurtleBot3 (TB3) システム構成 XM430 サーボモー タ XM430 サーボモー タ Open CR TTL TTL USB Raspberry Pi 3 USB USB LDS-01 LiDAR USB
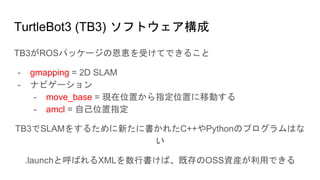
- 9. TurtleBot3 (TB3) ソフトウェア構成 TB3がROSパッケージの恩恵を受けてできること - gmapping = 2D SLAM - ナビゲーション - move_base = 現在位置から指定位置に移動する - amcl = 自己位置指定 TB3でSLAMをするために新たに書かれたC++やPythonのプログラムはな い .launchと呼ばれるXMLを数行書けば、既存のOSS資産が利用できる
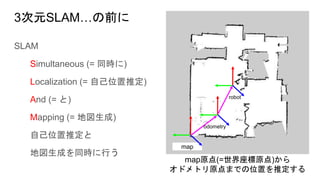
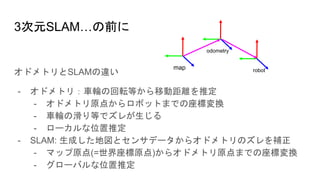
- 10. 3次元SLAM…の前に SLAM Simultaneous (= 同時に) Localization (= 自己位置推定) And (= と) Mapping (= 地図生成) 自己位置推定と 地図生成を同時に行う map odometry robot map原点(=世界座標原点)から オドメトリ原点までの位置を推定する
- 11. 3次元SLAM…の前に オドメトリとSLAMの違い - オドメトリ:車輪の回転等から移動距離を推定 - オドメトリ原点からロボットまでの座標変換 - 車輪の滑り等でズレが生じる - ローカルな位置推定 - SLAM: 生成した地図とセンサデータからオドメトリのズレを補正 - マップ原点(=世界座標原点)からオドメトリ原点までの座標変換 - グローバルな位置推定 map odometry robot
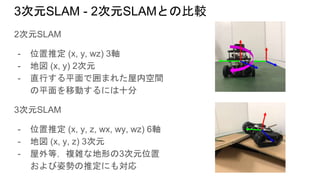
- 12. 3次元SLAM - 2次元SLAMとの比較 2次元SLAM - 位置推定 (x, y, wz) 3軸 - 地図 (x, y) 2次元 - 直行する平面で囲まれた屋内空間 の平面を移動するには十分 3次元SLAM - 位置推定 (x, y, z, wx, wy, wz) 6軸 - 地図 (x, y, z) 3次元 - 屋外等,複雑な地形の3次元位置 および姿勢の推定にも対応
- 13. 3次元SLAM - メリット 1. 屋外等の複雑な地形に対応できる可能性 2. 視認性 3. セマンティック
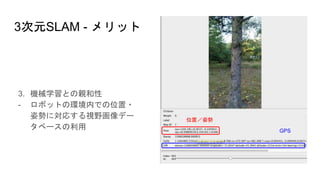
- 14. 3次元SLAM - メリット 3. 機械学習との親和性 - ロボットの環境内での位置? 姿勢に対応する視野画像デー タベースの利用 位置/姿勢 GPS
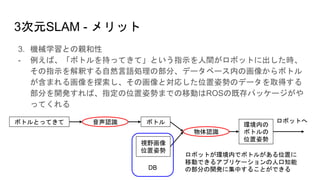
- 15. 3次元SLAM - メリット 3. 機械学習との親和性 - 例えば、「ボトルを持ってきて」という指示を人間がロボットに出した時、 その指示を解釈する自然言語処理の部分、データベース内の画像からボトル が含まれる画像を探索し、その画像と対応した位置姿勢のデータを取得する 部分を開発すれば、指定の位置姿勢までの移動はROSの既存パッケージがや ってくれる 視野画像 位置姿勢 物体認識 音声認識 ボトル 環境内の ボトルの 位置姿勢 ロボットへ ロボットが環境内でボトルがある位置に 移動できるアプリケーションの人口知能 の部分の開発に集中することができる ボトルとってきて DB
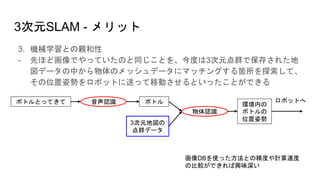
- 16. 3次元SLAM - メリット 3. 機械学習との親和性 - 先ほど画像でやっていたのと同じことを、今度は3次元点群で保存された地 図データの中から物体のメッシュデータにマッチングする箇所を探索して、 その位置姿勢をロボットに送って移動させるといったことができる 3次元地図の 点群データ 物体認識 音声認識 ボトルボトルとってきて 環境内の ボトルの 位置姿勢 ロボットへ 画像DBを使った方法との精度や計算速度 の比較ができれば興味深い
- 17. TurtleBot3 Monster TurttleBot3 Waffle に以下を追加 - ステレオカメラ ZED mini - Jetson TX2 特別価格 38,600 円(税 別)!!!!
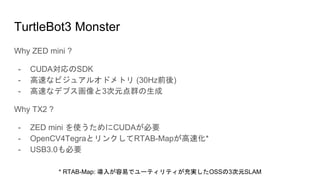
- 18. TurtleBot3 Monster Why ZED mini ? - CUDA対応のSDK - 高速なビジュアルオドメトリ (30Hz前後) - 高速なデプス画像と3次元点群の生成 Why TX2 ? - ZED mini を使うためにCUDAが必要 - OpenCV4TegraとリンクしてRTAB-Mapが高速化* - USB3.0も必要 * RTAB-Map: 導入が容易でユーティリティが充実したOSSの3次元SLAM
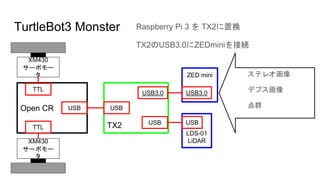
- 20. TurtleBot3 Monster XM430 サーボモー タ XM430 サーボモー タ Open CR TTL TTL USB TX2 USB USB LDS-01 LiDAR USB ZED mini USB3.0 USB3.0 Raspberry Pi 3 を TX2に置換 TX2のUSB3.0にZEDminiを接続 ステレオ画像 デプス画像 点群
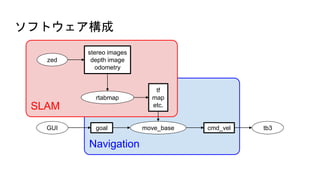
- 21. Navigation SLAM ソフトウェア構成 rtabmap zed stereo images depth image odometry tf map etc. move_base cmd_vel tb3goalGUI
- 22. 3次元地図生成デモ
- 23. 3次元地図生成デモ
- 24. 3次元地図生成デモ
- 25. 自律移动デモ
Editor's Notes
- #2: なんとかフォンならね