
























![[DL▌åši╗ß]NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis](https://cdn.slidesharecdn.com/ss_thumbnails/nerfdlseminar1-200327021512-thumbnail.jpg?width=560&fit=bounds)




















More Related Content
What's hot (20)
Viewers also liked (20)





![[źŪ®`ź┐ź▐źżź╦ź¾ź░+WEB├ŃÅŖ╗ß][R├ŃÅŖ╗ß] RčįšZż╦żĶżļź»źķź╣ź┐®`Ęų╬÷ - ╗Ņė├ŠÄ](https://cdn.slidesharecdn.com/ss_thumbnails/cluster-100416230155-phpapp02-thumbnail.jpg?width=560&fit=bounds)



![[źŪ®`ź┐ź▐źżź╦ź¾ź░+WEB├ŃÅŖ╗ß][R├ŃÅŖ╗ß] żŽżĖżßżŲżŪżŌż’ż½żļ RčįšZż╦żĶżļź»źķź╣ź┐®`Ęų╬÷ - ╦ŲżŲżżżļżŌż╬ż“ź░źļ®`źū╗»ż╣żļ-](https://cdn.slidesharecdn.com/ss_thumbnails/webmining2cluster-100319212743-phpapp01-thumbnail.jpg?width=560&fit=bounds)








Similar to Tokyor42 ggplot2 (13)













More from Yohei Sato (20)




















Tokyor42 ggplot2
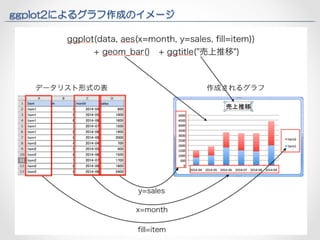
- 1. ggplot2ż╦żĶżļ źŪ®`ź┐┐╔ęĢ╗» └’ĪĪč¾ŲĮ Ż©@yokkunsŻ® Ą┌Ż┤Ż▓╗žTokyo.R │§ą─š▀ź╗ź├źĘźńź¾ 2014.08.30
- 2. AGENDA n? ūį╝║ĮBĮķ n? ggplot2ż╦żĶżļźŪ®`ź┐ż╬┐╔ęĢ╗» n? ggplot2ż╚żŽ n? ░¶ź░źķźš n? š█żņŠĆź░źķźš n? ╔ó▓╝ćĒ n? źęź╣ź╚ź░źķźÓ n? Žõżęż▓ćĒ
- 3. AGENDA n? ūį╝║ĮBĮķ n? ggplot2ż╦żĶżļźŪ®`ź┐ż╬┐╔ęĢ╗» n? ggplot2ż╚żŽ n? ░¶ź░źķźš n? š█żņŠĆź░źķźš n? ╔ó▓╝ćĒ n? źęź╣ź╚ź░źķźÓ n? Žõżęż▓ćĒ
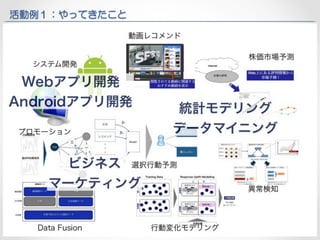
- 4. ūį╝║ĮBĮķ └’ č¾ŲĮ Ż©@yokkunsŻ® ?? żõż├żŲżŁż┐ż│ż╚ ?? WebźóźūźĻķ_░k ?? ĮyėŗĮŌ╬÷/źŪ®`ź┐ź▐źżź╦ź¾ź░ ?? ź▐®`ź▒źŲźŻź¾ź░ ?? Į±żõż├żŲżļż│ż╚ ?? ╚½╔ń║ßČŽż╬Ęų╬÷ ?? Ęų╬÷ŁhŠ│ż╬š¹éõ
- 8. AGENDA n? ūį╝║ĮBĮķ n? ggplot2ż╦żĶżļźŪ®`ź┐ż╬┐╔ęĢ╗» n? ggplot2ż╚żŽ n? ░¶ź░źķźš n? š█żņŠĆź░źķźš n? ╔ó▓╝ćĒ n? źęź╣ź╚ź░źķźÓ n? Žõżęż▓ćĒ
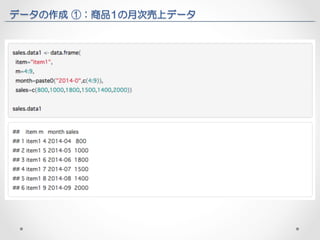
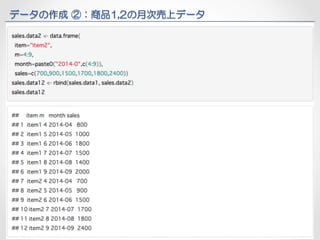
- 12. ▒Š┘Y┴ŽżŪ╩╣ė├ż╣żļźŪ®`ź┐ üóŽļż╬ēė╔ŽźŪ®`ź┐ ?? ╔╠ŲĘ1ż╬į┬┤╬ēė╔ŽźŪ®`ź┐ ?? ╔╠ŲĘ1,2ż╬į┬┤╬ēė╔ŽźŪ®`ź┐ ?? ĄĻ┼n1?3ż╬╔╠ŲĘ3,4ż╬╚š┤╬ēė╔ŽźŪ®`ź┐
- 16. AGENDA n? ūį╝║ĮBĮķ n? ggplot2ż╦żĶżļźŪ®`ź┐ż╬┐╔ęĢ╗» n? ggplot2ż╚żŽ n? ░¶ź░źķźš n? š█żņŠĆź░źķźš n? ╔ó▓╝ćĒ n? źęź╣ź╚ź░źķźÓ n? Žõżęż▓ćĒ
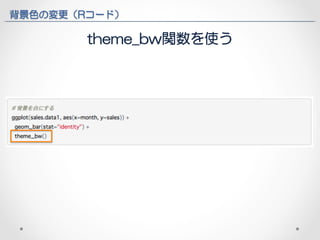
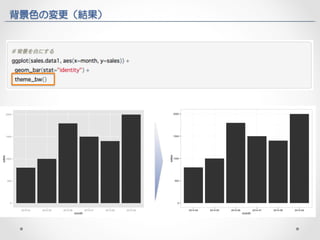
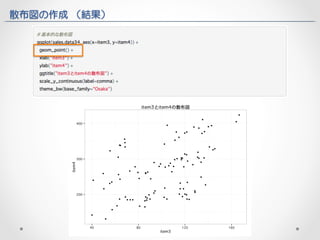
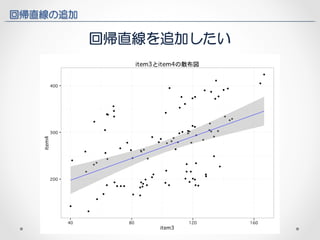
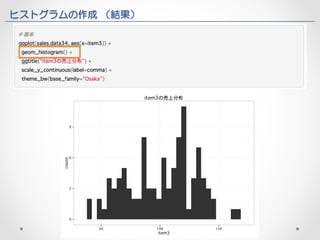
- 17. ╗∙▒ŠĄ─ż╩░¶ź░źķźš
- 50. AGENDA n? ūį╝║ĮBĮķ n? ggplot2ż╦żĶżļźŪ®`ź┐ż╬┐╔ęĢ╗» n? ggplot2ż╚żŽ n? ░¶ź░źķźš n? š█żņŠĆź░źķźš n? ╔ó▓╝ćĒ n? źęź╣ź╚ź░źķźÓ n? Žõżęż▓ćĒ
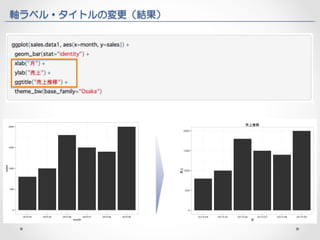
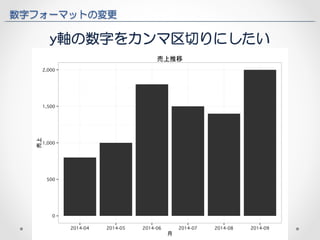
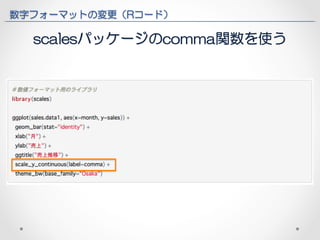
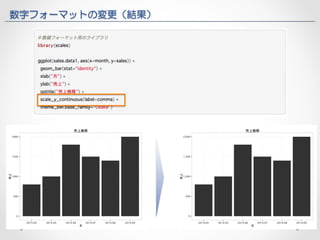
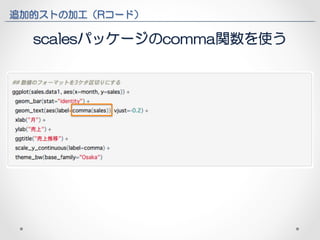
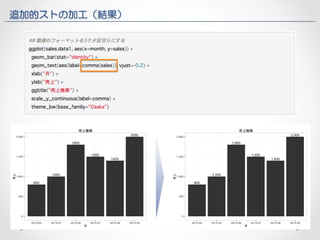
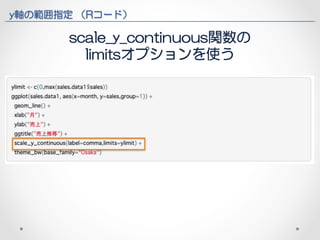
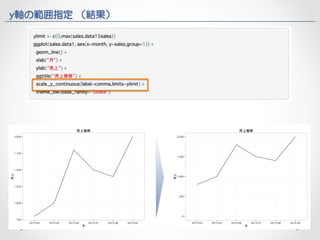
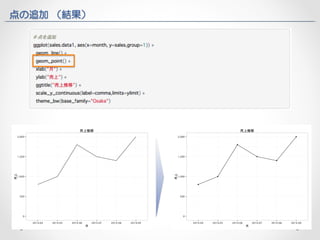
- 55. y▌Sż╬╣ĀćņųĖČ© Ż©Rź│®`ź╔Ż® scale_y_continuousķv╩²ż╬ ▒¶Š▒│ŠŠ▒│┘▓§ź¬źūźĘźńź¾ż“╩╣ż”
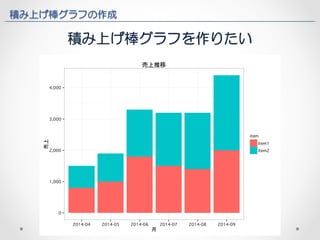
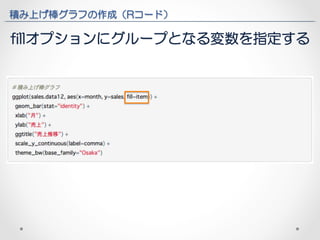
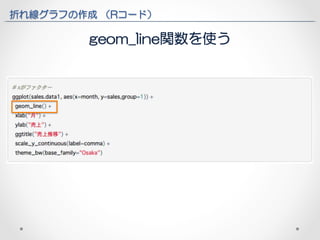
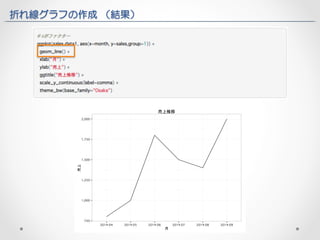
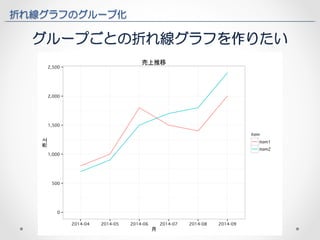
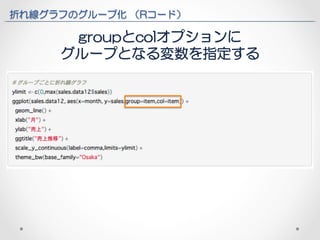
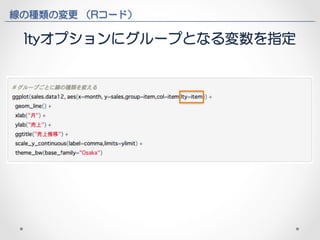
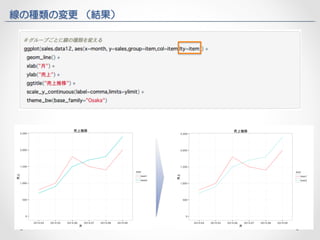
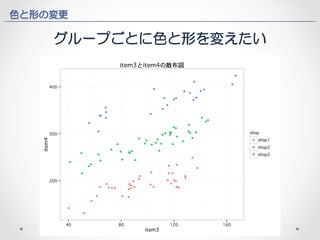
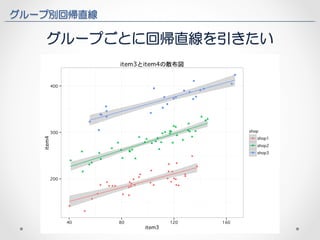
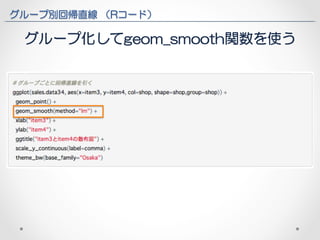
- 61. š█żņŠĆź░źķźšż╬ź░źļ®`źū╗» Ż©Rź│®`ź╔Ż® groupż╚colź¬źūźĘźńź¾ż╦ ź░źļ®`źūż╚ż╩żļēõ╩²ż“ųĖČ©ż╣żļ
- 66. AGENDA n? ūį╝║ĮBĮķ n? ggplot2ż╦żĶżļźŪ®`ź┐ż╬┐╔ęĢ╗» n? ggplot2ż╚żŽ n? ░¶ź░źķźš n? š█żņŠĆź░źķźš n? ╔ó▓╝ćĒ n? źęź╣ź╚ź░źķźÓ n? Žõżęż▓ćĒ
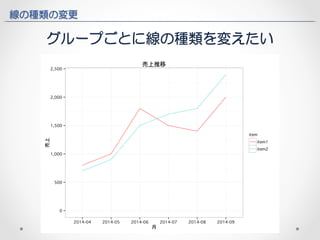
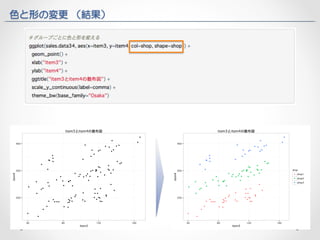
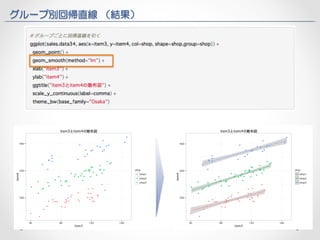
- 71. ╔½ż╚ą╬ż╬ēõĖ³ Ż©Rź│®`ź╔Ż® colż╚shapeź¬źūźĘźńź¾ż╦ ź░źļ®`źūż╚ż╩żļēõ╩²ż“ųĖČ©ż╣żļ
- 79. AGENDA n? ūį╝║ĮBĮķ n? ggplot2ż╦żĶżļźŪ®`ź┐ż╬┐╔ęĢ╗» n? ggplot2ż╚żŽ n? ░¶ź░źķźš n? š█żņŠĆź░źķźš n? ╔ó▓╝ćĒ n? źęź╣ź╚ź░źķźÓ n? Žõżęż▓ćĒ
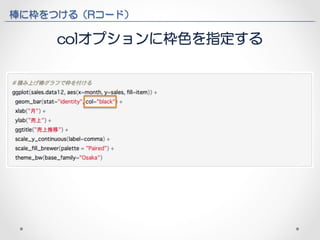
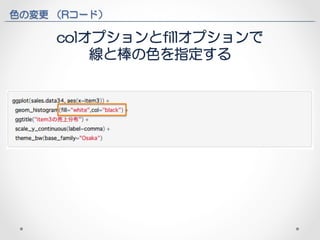
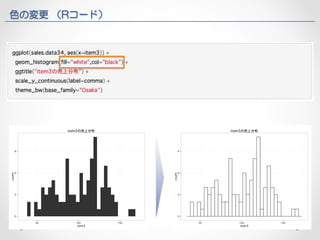
- 84. ╔½ż╬ēõĖ³ Ż©Rź│®`ź╔Ż® colź¬źūźĘźńź¾ż╚fillź¬źūźĘźńź¾żŪ Ž▀ż╚░¶ż╬╔½ż“ųĖČ©ż╣żļ
- 89. AGENDA n? ūį╝║ĮBĮķ n? ggplot2ż╦żĶżļźŪ®`ź┐ż╬┐╔ęĢ╗» n? ggplot2ż╚żŽ n? ░¶ź░źķźš n? š█żņŠĆź░źķźš n? ╔ó▓╝ćĒ n? źęź╣ź╚ź░źķźÓ n? Žõżęż▓ćĒ
- 93. AGENDA n? ūį╝║ĮBĮķ n? ggplot2ż╦żĶżļźŪ®`ź┐ż╬┐╔ęĢ╗» n? ggplot2ż╚żŽ n? ░¶ź░źķźš n? š█żņŠĆź░źķźš n? ╔ó▓╝ćĒ n? źęź╣ź╚ź░źķźÓ n? Žõżęż▓ćĒ
- 94. ▓╬┐╝ Ī÷Ģ°╝« ?æķ┬įĄ─źŪ®`ź┐ź▐źżź╦ź¾ź░ (źĘźĻ®`ź║ Useful R 4) - http://amzn.to/1otigKO Ą┌1š┬ ą“šō Ą┌2š┬ źŪ®`ź┐╝ė╣ż Ą┌3š┬ źŪ®`ź┐┐╔ęĢ╗» Ą┌4š┬ å¢Ņ}░kęŖ Ą┌5š┬ å¢Ņ}ĮŌøQ:ęŌ╦╝øQČ©ų¦į« Ą┌6š┬ å¢Ņ}ĮŌøQ:ūįäė╗»?ūŅ▀m╗» Ą┌7š┬ ä┐╣¹£yČ© ĖČÕhA R/RStudioż╬ī¦╚ļ Ī÷Rź│®`ź╔ż╚īgąąĮY╣¹ ?TokyoR#42 źŪ®`ź┐ż╬┐╔ęĢ╗»Ż©ggplot2Ż® - http://rpubs.com/yokkuns/27108
- 95. Enjoy!