1 of 37
Downloaded 78 times


Ad
Recommended
Bootloaders (U-Boot)
Bootloaders (U-Boot) Omkar Rane
?
This document discusses bootloaders for embedded systems. It defines a bootloader as the first code executed after a system powers on or resets that is responsible for loading the operating system kernel. The document then describes the tasks of a bootloader like initializing hardware, loading binaries from storage, and providing a shell. It outlines the booting process differences between desktops and embedded systems. Finally, it focuses on the universal bootloader U-Boot, describing its directory structure, configuration, building process, and commands.Embedded Operating System - Linux
Embedded Operating System - LinuxEmertxe Information Technologies Pvt Ltd
?
The document provides an extensive overview of embedded operating systems, specifically focusing on Linux. It discusses the evolution of open-source software, the architecture of embedded Linux systems, and the toolchain development process, detailing components such as compilers, libraries, and bootloaders. Additionally, it covers practical aspects of building embedded systems using tools like Buildroot and Yocto, along with examples from specific hardware platforms.Linux Device Tree
Linux Device Tree░¼ÕŹ┐Ų╝╝
?
The document discusses Linux device trees and how they are used to describe hardware configurations. Some key points:
- A device tree is a data structure that describes hardware connections and configurations. It allows the same kernel to support different hardware.
- Device trees contain nodes that represent devices, with properties like compatible strings to identify drivers. They describe things like memory maps, interrupts, and bus attachments.
- The kernel uses the device tree passed by the bootloader to identify and initialize hardware. Drivers match based on compatible properties.
- Device tree files with .dts extension can be compiled to binary blobs (.dtb) and overlays (.dtbo) used at boot time to describe hardware.U Boot or Universal Bootloader
U Boot or Universal BootloaderSatpal Parmar
?
The document provides an overview of Das U-Boot, a universal boot loader used to load operating systems and applications into memory on embedded systems. It discusses U-Boot's features such as its command line interface, ability to load images from different sources, and support for various architectures and boards. It also covers compiling and configuring U-Boot, as well as its basic command set and image support capabilities.U-Boot - An universal bootloader
U-Boot - An universal bootloader Emertxe Information Technologies Pvt Ltd
?
The document provides an overview of U-Boot, a universal bootloader used across various architectures, including its source code structure, building instructions, and essential commands. It outlines the components and organization of the U-Boot source tree, including configuration files and directory structures, as well as the responsibility and functionalities of U-Boot during the boot process. Additionally, key commands and environment variables utilized in U-Boot for system operations are detailed.U-Boot presentation 2013
U-Boot presentation 2013Wave Digitech
?
U-Boot is an open source boot loader that initializes hardware and loads operating systems. It supports many CPUs and boards. The boot process involves a pre-relocation phase where U-Boot initializes hardware and copies itself to RAM, and a post-relocation phase where it finishes hardware initialization and loads the kernel or operating system. Debugging can be done before and after relocation by setting breakpoints and examining memory.LAS16-402: ARM Trusted Firmware ©C from Enterprise to Embedded
LAS16-402: ARM Trusted Firmware ©C from Enterprise to EmbeddedLinaro
?
The document discusses updates on ARM Trusted Firmware, highlighting project news, security hardening efforts, and AArch32 support with enhancements like a translation table library and performance improvements. It outlines the transition from a Contributor License Agreement to an inbound-outbound model for contributions and emphasizes a commitment to security vulnerability handling. Additionally, future plans include regular release cycles, removal of deprecated APIs, and the integration of new technologies to further support AArch32 architectures.Linux Device DriverĪ»s
Linux Device DriverĪ»sRashmi Warghade
?
The document provides an overview of the Linux kernel, focusing on device drivers and their roles in managing hardware interactions. It discusses various types of device drivers, including character, block, and network devices, along with their functionalities and relationships within the kernel framework. Additionally, it touches on security concerns, versioning, and how to implement and load kernel modules.Arm device tree and linux device drivers
Arm device tree and linux device driversHoucheng Lin
?
This document discusses how the Linux kernel supports different ARM boards using a common source code base. It describes how device tree is used to describe hardware in a board-agnostic way. The kernel initializes machine-specific code via the device tree and initializes drivers by matching compatible strings. This allows a single kernel binary to support multiple boards by abstracting low-level hardware details into the device tree rather than the kernel source. The document also contrasts the ARM approach to the x86 approach, where BIOS abstraction and standardized buses allow one kernel to support most x86 hardware.Embedded Linux on ARM
Embedded Linux on ARMEmertxe Information Technologies Pvt Ltd
?
The document provides an extensive overview of embedded operating systems with a focus on Linux, detailing its history, architecture, and advantages for embedded development. It covers various aspects of embedded Linux, including hardware interfacing, boot processes, toolchains, and libraries relevant for building embedded systems. Additionally, it discusses development environments, cross-compilation tools, and specific methodologies for creating toolchains, along with a deep dive into popular tools like Buildroot and U-Boot used in this domain.Embedded Linux BSP Training (Intro)
Embedded Linux BSP Training (Intro)RuggedBoardGroup
?
The document outlines an embedded Linux BSP training organized by YoctoTutor and RuggedBoard, covering various topics like embedded OS components, boot loaders, Linux kernel, and root file systems. It includes details on different embedded systems classifications, the boot process, and provides instructions for compiling U-Boot and Linux kernel for the RuggedBoard. Additionally, it discusses the use of various tools and libraries for programming and demonstrates the experience of the presenter, Vasu, in embedded technologies.Embedded Android : System Development - Part II (Linux device drivers)
Embedded Android : System Development - Part II (Linux device drivers)Emertxe Information Technologies Pvt Ltd
?
The document provides an extensive introduction to Linux device drivers, covering essential skills like C programming, Linux file systems, and kernel source management. It explains character, block, and USB drivers, including driver registration, file operations, memory access, and debugging. Additionally, it outlines the practical aspects of driver development with hands-on examples, kernel interaction, and I/O control APIs.Embedded Android : System Development - Part I
Embedded Android : System Development - Part IEmertxe Information Technologies Pvt Ltd
?
The document provides an in-depth overview of Android system development, detailing its architecture, history, software stack, and key features across various versions. It highlights Android's evolution, from its inception based on the Linux kernel to subsequent updates that introduced essential capabilities and optimizations for mobile devices. Additionally, the document covers the Android runtime, memory management, and kernel changes that improve performance and security measures.I2c drivers
I2c driverspradeep_tewani
?
The document provides a comprehensive overview of the I2C (Inter-Integrated Circuit) protocol, detailing its structure, conditions, and transactions. It covers the Linux I2C subsystem, including device driver registration, initialization, and APIs for accessing I2C devices like EEPROMs. Additionally, it emphasizes effective power management and the decoupling of device drivers from controller drivers for enhanced code reusability across platforms.Linux Kernel Booting Process (1) - For NLKB
Linux Kernel Booting Process (1) - For NLKBshimosawa
?
The document discusses the booting process in computer systems, specifically focusing on the Linux operating system and various boot loaders such as GRUB and U-Boot. It covers the definition and etymology of 'boot', the role of BIOS and UEFI, and details about x86 and ARM architectures, including their instruction sets and modes. Additionally, it presents a thorough boot sequence for x86 architecture and the importance of different registers and segmentations in the booting process.Q4.11: Porting Android to new Platforms
Q4.11: Porting Android to new PlatformsLinaro
?
This document provides an overview of porting Android to new platforms. It discusses the Android software stack, the Android Open Source Project structure, the AOSP code structure, common Android hardware abstraction layers, device configuration files, the AOSP build process, the Android boot process, and Android debugging tools.U boot porting guide for SoC
U boot porting guide for SoCMacpaul Lin
?
This document provides an overview of the steps to port the U-boot bootloader to a new SoC using the NDS32 architecture as an example. It describes the directory structure of U-boot and key files related to the architecture, board, configuration, and device drivers. The document outlines where to define SoC hardware addresses, initialize board-specific peripherals, configure options, and implement device drivers to support the new SoC and board.LCU14 500 ARM Trusted Firmware
LCU14 500 ARM Trusted FirmwareLinaro
?
The document outlines the capabilities and updates of ARM Trusted Firmware for 64-bit ARMv8-A systems. It discusses standardized firmware, reference implementations, and integration with trusted operating systems, while highlighting recent developments such as a complete PSCI implementation and the integration of OP-TEE. The presentation emphasizes the open-source nature of the firmware and invites contributions from developers.Study on Android Emulator
Study on Android EmulatorSamael Wang
?
The document discusses the Android emulator and provides instructions on how to build and run the emulator from source. It describes:
1) How to get the emulator source code from Google's source repository, and how to build the emulator using the provided build scripts.
2) The different emulation engines (classic vs qemu2), virtual platforms (Goldfish vs Ranchu), and UI backends (SDL2 vs Qt) that are supported.
3) The various ways to launch the emulator, including by configuring an Android Virtual Device (AVD), setting environment variables, or directly invoking the emulation binaries.
4) Key components of the emulator like the Goldfish virtual platform and how devices are registeredEmbedded Linux Kernel - Build your custom kernel
Embedded Linux Kernel - Build your custom kernelEmertxe Information Technologies Pvt Ltd
?
The document provides comprehensive guidelines on working with the Embedded Linux Kernel, covering topics such as general information, configuration, building, and deployment. It details kernel subsystems, source code browsing techniques, and various configuration methods, including make configurations specific to architecture. Additionally, the document outlines the compilation process to create a kernel image and the steps to deploy the kernel on target hardware using TFTP and U-Boot.Linux Kernel Boot Process , SOSCON 2015, By Mario Cho
Linux Kernel Boot Process , SOSCON 2015, By Mario ChoMario Cho
?
Samsung Open Source Conference 2015.
Linux Kernel Boot process
link: http://www.soscon.net/index.asp
More Related Content
What's hot (20)
Embedded Operating System - Linux
Embedded Operating System - LinuxEmertxe Information Technologies Pvt Ltd
?
The document provides an extensive overview of embedded operating systems, specifically focusing on Linux. It discusses the evolution of open-source software, the architecture of embedded Linux systems, and the toolchain development process, detailing components such as compilers, libraries, and bootloaders. Additionally, it covers practical aspects of building embedded systems using tools like Buildroot and Yocto, along with examples from specific hardware platforms.Linux Device Tree
Linux Device Tree░¼ÕŹ┐Ų╝╝
?
The document discusses Linux device trees and how they are used to describe hardware configurations. Some key points:
- A device tree is a data structure that describes hardware connections and configurations. It allows the same kernel to support different hardware.
- Device trees contain nodes that represent devices, with properties like compatible strings to identify drivers. They describe things like memory maps, interrupts, and bus attachments.
- The kernel uses the device tree passed by the bootloader to identify and initialize hardware. Drivers match based on compatible properties.
- Device tree files with .dts extension can be compiled to binary blobs (.dtb) and overlays (.dtbo) used at boot time to describe hardware.U Boot or Universal Bootloader
U Boot or Universal BootloaderSatpal Parmar
?
The document provides an overview of Das U-Boot, a universal boot loader used to load operating systems and applications into memory on embedded systems. It discusses U-Boot's features such as its command line interface, ability to load images from different sources, and support for various architectures and boards. It also covers compiling and configuring U-Boot, as well as its basic command set and image support capabilities.U-Boot - An universal bootloader
U-Boot - An universal bootloader Emertxe Information Technologies Pvt Ltd
?
The document provides an overview of U-Boot, a universal bootloader used across various architectures, including its source code structure, building instructions, and essential commands. It outlines the components and organization of the U-Boot source tree, including configuration files and directory structures, as well as the responsibility and functionalities of U-Boot during the boot process. Additionally, key commands and environment variables utilized in U-Boot for system operations are detailed.U-Boot presentation 2013
U-Boot presentation 2013Wave Digitech
?
U-Boot is an open source boot loader that initializes hardware and loads operating systems. It supports many CPUs and boards. The boot process involves a pre-relocation phase where U-Boot initializes hardware and copies itself to RAM, and a post-relocation phase where it finishes hardware initialization and loads the kernel or operating system. Debugging can be done before and after relocation by setting breakpoints and examining memory.LAS16-402: ARM Trusted Firmware ©C from Enterprise to Embedded
LAS16-402: ARM Trusted Firmware ©C from Enterprise to EmbeddedLinaro
?
The document discusses updates on ARM Trusted Firmware, highlighting project news, security hardening efforts, and AArch32 support with enhancements like a translation table library and performance improvements. It outlines the transition from a Contributor License Agreement to an inbound-outbound model for contributions and emphasizes a commitment to security vulnerability handling. Additionally, future plans include regular release cycles, removal of deprecated APIs, and the integration of new technologies to further support AArch32 architectures.Linux Device DriverĪ»s
Linux Device DriverĪ»sRashmi Warghade
?
The document provides an overview of the Linux kernel, focusing on device drivers and their roles in managing hardware interactions. It discusses various types of device drivers, including character, block, and network devices, along with their functionalities and relationships within the kernel framework. Additionally, it touches on security concerns, versioning, and how to implement and load kernel modules.Arm device tree and linux device drivers
Arm device tree and linux device driversHoucheng Lin
?
This document discusses how the Linux kernel supports different ARM boards using a common source code base. It describes how device tree is used to describe hardware in a board-agnostic way. The kernel initializes machine-specific code via the device tree and initializes drivers by matching compatible strings. This allows a single kernel binary to support multiple boards by abstracting low-level hardware details into the device tree rather than the kernel source. The document also contrasts the ARM approach to the x86 approach, where BIOS abstraction and standardized buses allow one kernel to support most x86 hardware.Embedded Linux on ARM
Embedded Linux on ARMEmertxe Information Technologies Pvt Ltd
?
The document provides an extensive overview of embedded operating systems with a focus on Linux, detailing its history, architecture, and advantages for embedded development. It covers various aspects of embedded Linux, including hardware interfacing, boot processes, toolchains, and libraries relevant for building embedded systems. Additionally, it discusses development environments, cross-compilation tools, and specific methodologies for creating toolchains, along with a deep dive into popular tools like Buildroot and U-Boot used in this domain.Embedded Linux BSP Training (Intro)
Embedded Linux BSP Training (Intro)RuggedBoardGroup
?
The document outlines an embedded Linux BSP training organized by YoctoTutor and RuggedBoard, covering various topics like embedded OS components, boot loaders, Linux kernel, and root file systems. It includes details on different embedded systems classifications, the boot process, and provides instructions for compiling U-Boot and Linux kernel for the RuggedBoard. Additionally, it discusses the use of various tools and libraries for programming and demonstrates the experience of the presenter, Vasu, in embedded technologies.Embedded Android : System Development - Part II (Linux device drivers)
Embedded Android : System Development - Part II (Linux device drivers)Emertxe Information Technologies Pvt Ltd
?
The document provides an extensive introduction to Linux device drivers, covering essential skills like C programming, Linux file systems, and kernel source management. It explains character, block, and USB drivers, including driver registration, file operations, memory access, and debugging. Additionally, it outlines the practical aspects of driver development with hands-on examples, kernel interaction, and I/O control APIs.Embedded Android : System Development - Part I
Embedded Android : System Development - Part IEmertxe Information Technologies Pvt Ltd
?
The document provides an in-depth overview of Android system development, detailing its architecture, history, software stack, and key features across various versions. It highlights Android's evolution, from its inception based on the Linux kernel to subsequent updates that introduced essential capabilities and optimizations for mobile devices. Additionally, the document covers the Android runtime, memory management, and kernel changes that improve performance and security measures.I2c drivers
I2c driverspradeep_tewani
?
The document provides a comprehensive overview of the I2C (Inter-Integrated Circuit) protocol, detailing its structure, conditions, and transactions. It covers the Linux I2C subsystem, including device driver registration, initialization, and APIs for accessing I2C devices like EEPROMs. Additionally, it emphasizes effective power management and the decoupling of device drivers from controller drivers for enhanced code reusability across platforms.Linux Kernel Booting Process (1) - For NLKB
Linux Kernel Booting Process (1) - For NLKBshimosawa
?
The document discusses the booting process in computer systems, specifically focusing on the Linux operating system and various boot loaders such as GRUB and U-Boot. It covers the definition and etymology of 'boot', the role of BIOS and UEFI, and details about x86 and ARM architectures, including their instruction sets and modes. Additionally, it presents a thorough boot sequence for x86 architecture and the importance of different registers and segmentations in the booting process.Q4.11: Porting Android to new Platforms
Q4.11: Porting Android to new PlatformsLinaro
?
This document provides an overview of porting Android to new platforms. It discusses the Android software stack, the Android Open Source Project structure, the AOSP code structure, common Android hardware abstraction layers, device configuration files, the AOSP build process, the Android boot process, and Android debugging tools.U boot porting guide for SoC
U boot porting guide for SoCMacpaul Lin
?
This document provides an overview of the steps to port the U-boot bootloader to a new SoC using the NDS32 architecture as an example. It describes the directory structure of U-boot and key files related to the architecture, board, configuration, and device drivers. The document outlines where to define SoC hardware addresses, initialize board-specific peripherals, configure options, and implement device drivers to support the new SoC and board.LCU14 500 ARM Trusted Firmware
LCU14 500 ARM Trusted FirmwareLinaro
?
The document outlines the capabilities and updates of ARM Trusted Firmware for 64-bit ARMv8-A systems. It discusses standardized firmware, reference implementations, and integration with trusted operating systems, while highlighting recent developments such as a complete PSCI implementation and the integration of OP-TEE. The presentation emphasizes the open-source nature of the firmware and invites contributions from developers.Study on Android Emulator
Study on Android EmulatorSamael Wang
?
The document discusses the Android emulator and provides instructions on how to build and run the emulator from source. It describes:
1) How to get the emulator source code from Google's source repository, and how to build the emulator using the provided build scripts.
2) The different emulation engines (classic vs qemu2), virtual platforms (Goldfish vs Ranchu), and UI backends (SDL2 vs Qt) that are supported.
3) The various ways to launch the emulator, including by configuring an Android Virtual Device (AVD), setting environment variables, or directly invoking the emulation binaries.
4) Key components of the emulator like the Goldfish virtual platform and how devices are registeredEmbedded Linux Kernel - Build your custom kernel
Embedded Linux Kernel - Build your custom kernelEmertxe Information Technologies Pvt Ltd
?
The document provides comprehensive guidelines on working with the Embedded Linux Kernel, covering topics such as general information, configuration, building, and deployment. It details kernel subsystems, source code browsing techniques, and various configuration methods, including make configurations specific to architecture. Additionally, the document outlines the compilation process to create a kernel image and the steps to deploy the kernel on target hardware using TFTP and U-Boot.Embedded Android : System Development - Part II (Linux device drivers)
Embedded Android : System Development - Part II (Linux device drivers)Emertxe Information Technologies Pvt Ltd
?
Similar to ?? 02 ARM ??? ?? ?? ?? (20)
Linux Kernel Boot Process , SOSCON 2015, By Mario Cho
Linux Kernel Boot Process , SOSCON 2015, By Mario ChoMario Cho
?
Samsung Open Source Conference 2015.
Linux Kernel Boot process
link: http://www.soscon.net/index.asp
MCU(nanheekim)
MCU(nanheekim)Nanhee Kim
?
@Powersupply(YeungnamUniv.) @NanheeKim @nh9k
??? ??? ???? ?????!
Please, feel free to contact me, if you have any questions!
github: https://github.com/nh9k
email: kimnanhee97@gmail.com?????? ????1
?????? ????1?? ?
?
Arduino Open Lecture for Beginners. MOT.Eliot
Why people want arduino? It's time to think paradigm shift.???????????????????????????
???????????????????????????Mario Cho
?
KOSS CON 2016 Keynote? ??? ?????.
?? ??? ????? ???? ?? ??????.
?? ????? ?? ???? ?? ??,
?? ?? ????? ???? ?? ??,
?? ??? ???? ?? ????? ?????.
??100 ??? ???? 8
??100 ??? ???? 8?? ?
?
mango100(cpu:s5pc100)
u-boot booting Sequence
http://cafe.naver.com/embeddedcrazyboysCortex M3?? Wi-Fi ????
Cortex M3?? Wi-Fi ?????? ?
?
Cortex M3?? Wi-Fi ????
For more information, Refer to this url
http://www.life4iot.com/?page_id=4076Ad
More from chcbaram (6)
OpenCR tutorial_icra2017
OpenCR tutorial_icra2017 chcbaram
?
- OpenCR is a main controller board for TurtleBot3 that provides an open-source hardware and software platform for powering and operating sensors and actuators.
- It uses a high-performance STM32F746 microcontroller and supports Arduino IDE development. It has interfaces for communicating with Dynamixel motors, IMU sensors, and providing power output.
- The rosserial package converts ROS messages to a serial format for communication between OpenCR and ROS via USB. Examples are provided to demonstrate publishing IMU data and controlling TurtleBot3 using OpenCR and ROS.Ad
?? 02 ARM ??? ?? ?? ??
- 1. ARM ??? ???? ?? Hancheol Cho
- 2. MCU ??? ??? ?? ???? Data Sheet Reference Manual
- 3. Data Sheet? ??? ?? Data Sheet? ?? ???? ??
- 4. Data Sheet? ??? ?? Data Sheet? ?? ???
- 5. ?? ?? ? ??? ??? ??? ?? ? Data Sheet? ??? ??
- 6. ?? ???? ? ??? ??? ?? Data Sheet Study
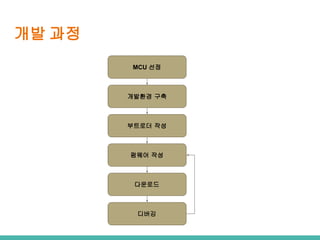
- 7. ???? MCU? ??? ???? ??? ?????? MCU ????? ???? ??? ?? ??? ??? ??? ???? ???? ???? ???? ?? ??
- 8. ?? MCU? ?? ?? ????
- 9. ?? ?? MCU ?? ???? ?? ???? ?? ??? ?? ???? ???
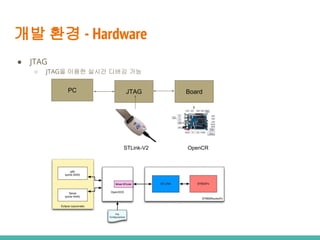
- 10. ?? ?? - Hardware Ī± JTAG Ī JTAG? ??? ??? ??? ?? PC JTAG Board STLink-V2 OpenCR
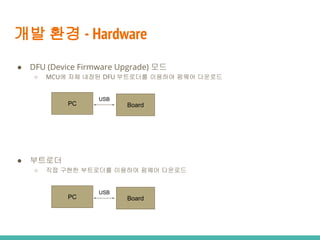
- 11. ?? ?? - Hardware Ī± ???? Ī ?? ??? ????? ???? ??? ???? PC Board USB Ī± DFU (Device Firmware Upgrade) ?? Ī MCU? ?? ??? DFU ????? ???? ??? ???? PC Board USB
- 12. ???? ?? Ī± ???? ?????? ?? ???? ??? ??? ?? ???? vs ?? ????
- 13. ???? ?? ?? ?? ?? ?? ???? Ī± ?? ???? Ī ?? ?? ?? ???? ?? ?? Ī ?? ??? ?? ?? ??
- 14. ???? - ?? Ī± http://www.openstm32.org/HomePage Ī± http://www.coocox.org/software/coide.php Ī± http://www.emide.org/ Ī± Eclipse + GCC Ī https://eclipse.org/ Ī https://launchpad.net/gcc-arm-embedded
- 15. ???? - ??
- 16. ???? - TrueSTUDIO Ī± ST?? MCU? ????? ??? ?? ??? TrueSTUDIO? ?? ???
- 17. ?? ?? ??? ?? ?? ???? ???????
- 18. ?? ?? ??? ?? ?? ???? ?? ???? ???.
- 19. ?? ?? ??? ??? ?? ??/??? ?? ??? ?? ??
- 20. ?? ?? ???
- 21. ?? ?? ???
- 22. ?? ???
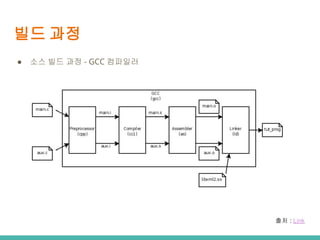
- 23. ?? ?? Ī± ?? ?? ?? - GCC ???? ?? : Link
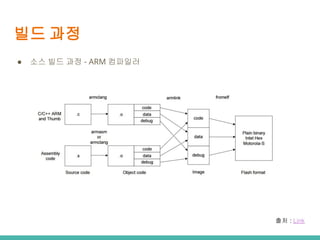
- 24. ?? ?? Ī± ?? ?? ?? - ARM ???? ?? : Link
- 25. ???? ?? ?
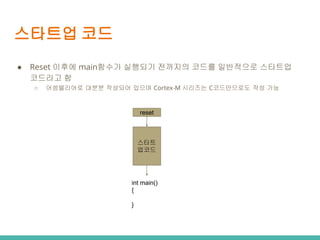
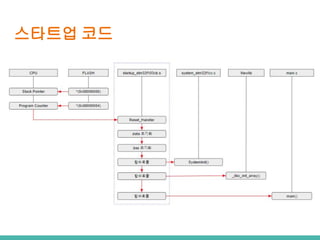
- 26. ???? ?? Ī± Reset ??? main??? ???? ???? ??? ????? ???? ???? ? Ī ?????? ??? ???? ??? Cortex-M ???? C?????? ?? ?? reset int main() { } ??? ???
- 27. ???? ??
- 28. ???? ??
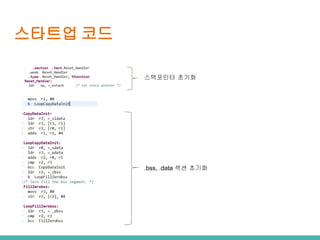
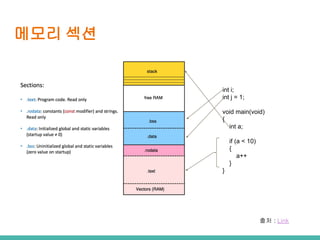
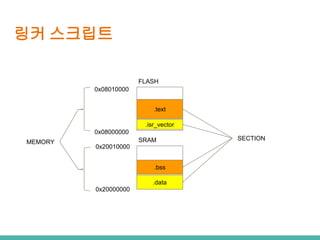
- 29. ???? ?? ????? ??? .bss, .data ?? ???
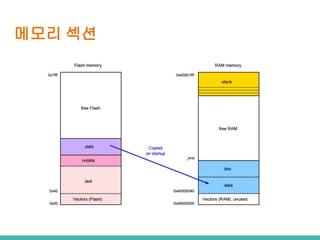
- 30. ???? ?? ???? ?? ?? ??
- 31. ?? ???? ?
- 32. ??? ?? ?? : Link int i; int j = 1; void main(void) { int a; if (a < 10) { a++ } }
- 33. ??? ??
- 34. ?? ???? ???? ??? ??? ??? ???? ???? ???? ?? ??
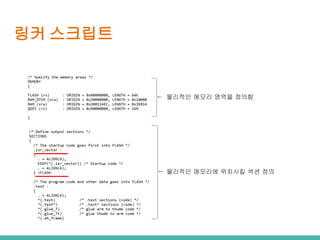
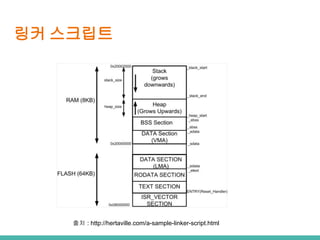
- 36. ?? ???? ?? : http://hertaville.com/a-sample-linker-script.html
- 37. Time to break Ī± Zynq ??? Ī Zynq FPGA ??? #1 - ?? ? ???? Ī Zynq FPGA ??? #2 - Hello World ?? Ī Zynq FPGA ??? #3 - LED ??