
1 of 17
Downloaded 11 times



Ad
Recommended
20190307 visualslam summary
20190307 visualslam summaryTakuya Minagawa
?
Visual SLAM研究について、カメラだけでなく、RGB-DやIMUを用いた手法について、個人的に重要と思われる研究に絞って紹介しました。SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン? オープンソースの自動運転ソフトAutowareを解説 ?
SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン? オープンソースの自動運転ソフトAutowareを解説 ?SSII
?
6/9 (木) 09:30~10:40メイン会場
講師:河口 信夫 氏(名古屋大学)、斉藤 之寛 氏(株式会社ティアフォー)
概要: 自動運転を実現するためには、ロボットビジョンに基づき、環境を認識するために様々な処理(パーセプション)を行っています。 本講演では、Autoware を事例とし、自動運転に使われている画像処理、3D物体認識や、それらを用いた自動運転における判断?制御について解説します。また、AutowareはROS上で動作しており、様々なセンサやアクチュエータを利用できるので、自動車だけでなく、小型の自律移動ロボットにも活用可能です。Autoware を活用している様々な自律移動ロボットを紹介します。[DL輪読会]Objects as Points
[DL輪読会]Objects as PointsDeep Learning JP
?
2019/06/14
Deep Learning JP:
http://deeplearning.jp/seminar-2/ SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~SSII
?
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~
6/9 (水) 9:45~10:55
講師:内山 英昭 氏 (奈良先端科学技術大学院大学)
概要: Visual SLAMとは、カメラの周辺環境の3次元形状を認識しながら、カメラの動きを算出する技術である。Visual SLAMやIMUを併用したVisual-inertial SLAMの動作原理を理解するためには、カメラの位置姿勢推定や三角測量などのカメラ幾何の基礎や、特徴点マッチングや画像検索といった画像処理の知識が必要となる。本チュートリアルでは、動作原理を理解する上での基礎知識を概説するとともに、動的環境下における精度低下を低減する手法や、近年多くの取り組みがあるディープラーニングを用いた手法を紹介する。SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 ? TransformerのCompute...
SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 ? TransformerのCompute...SSII
?
SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 ? TransformerのComputer Visionにおける躍進と 肥大化する計算資源 ?
6/10 (木) 14:00~14:30
講師:藤井 亮宏 氏(株式会社エクサウィザーズ)?
概要: Vision Transformer (ViT) が2020年末に発表され、ImageNetの認識精度においてConvolutional Neural Networks (CNN) ベースのモデルをTransformerのみを使ったモデルが凌駕した。それによってTransformerがAlexNet以降画像系タスクを支配していたCNNに取って換わる可能性が高くなったが、ViTでは大量のデータと大規模な計算資源を必要とすることが障壁となっている。本チュートリアル」では、Computer vision (CV) 系のタスクでTransformerの用途とその成果、実活用の視点からCNNとTransformerの比較、今後Transformer x CVの展望、を議論する。
講師による公開場所:
/exwzds/210610-ssiii2021-computer-vision-x-trasnformer画像生成?生成モデル メタサーベイ
画像生成?生成モデル メタサーベイcvpaper. challenge
?
The document presents an overview of the research group 'Generations' focused on image generation and generative models, detailing their contributions to fields like unpaired image-to-image translation and domain adaptation. It highlights various studies and techniques, including CycleGAN and neural radiance fields, aimed at enhancing image translation while preserving contextual integrity. The group is actively seeking new members for collaboration on these innovative themes.3次元レジストレーションの基础と翱辫别苍3顿を用いた3次元点群処理
3次元レジストレーションの基础と翱辫别苍3顿を用いた3次元点群処理Toru Tamaki
?
The document discusses various algorithms and techniques for point cloud registration, including the Iterative Closest Point (ICP) algorithm and its variations in aligning 3D point sets. It references numerous studies and methods for optimizing transformations, particularly focusing on point-to-point and point-to-plane distances. Additionally, it details computational approaches and tools available in programming libraries for effective 3D modeling and transformation estimation.[DL輪読会]Vision Transformer with Deformable Attention (Deformable Attention Tra...
[DL輪読会]Vision Transformer with Deformable Attention (Deformable Attention Tra...Deep Learning JP
?
2022/01/14
Deep Learning JP:
http://deeplearning.jp/seminar-2/SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~SSII
?
SSII2019 チュートリアル講演
TS3 6月14日(金) 9:00~10:20 (メインホール)
カメラの幾何学的キャリブレーションはカメラを使った3次元計測?認識に欠かすことができない基礎技術です。?近年では LIDAR や ToF カメラのように深度情報を直接出力するカメラや、全周囲カメラのように透視投影ではないカメラをセンサとして使用することも一般的になりました。本講演ではこれらの幾何学的キャリブレーションについて、実例を交えながら基礎からご紹介します。さらに講演内容に対応した初学者向けのサンプルコードについても紹介します。物体検知(Meta Study Group 発表資料)
物体検知(Meta Study Group 発表資料)cvpaper. challenge
?
cvpaper.challenge の Meta Study Group 発表スライド
cvpaper.challenge はコンピュータビジョン分野の今を映し、トレンドを創り出す挑戦です。論文サマリ?アイディア考案?議論?実装?論文投稿に取り組み、凡ゆる知識を共有します。2019の目標「トップ会議30+本投稿」「2回以上のトップ会議網羅的サーベイ」
http://xpaperchallenge.org/cv/ Humpback whale identification challenge反省会
Humpback whale identification challenge反省会Yusuke Uchida
?
Humpback whale identification challengeの概要、主要カーネルの説明、Topソリューションの解説です痴颈蝉耻补濒厂贵惭と惭别蝉丑尝补产と颁濒辞耻诲颁辞尘辫补谤别によるドローン撮影画像を用いたデジタル地図作成
痴颈蝉耻补濒厂贵惭と惭别蝉丑尝补产と颁濒辞耻诲颁辞尘辫补谤别によるドローン撮影画像を用いたデジタル地図作成Hiroshi Yamaguchi
?
ドローンで撮影した画像から3次元モデルやデジタル地図を作る方法。第126回 ロボット工学セミナー 三次元点群と深層学習
第126回 ロボット工学セミナー 三次元点群と深層学習Naoya Chiba
?
2020/05/22に開催された,日本ロボット学会 第126回ロボット工学セミナー「ロボットのための画像処理技術」の第4話「三次元点群と深層学習」の発表資料です.
図等を各論文から引用しています.間違いなどあればご指摘頂けるとありがたいです.
https://www.rsj.or.jp/event/seminar/news/2020/s126.html狈耻尘笔测闇入门
狈耻尘笔测闇入门Ryosuke Okuta
?
NumPyのちょっと不思議な挙動などをまとめた資料です。クイズ形式で紹介&解説をします。
PFIセミナー2016/01/28:狈耻尘笔测闇入门
https://www.youtube.com/watch?v=fdLKVMCrzNE
2016/3/20 問題の一部を修正
【DL輪読会】ViTPose: Simple Vision Transformer Baselines for Human Pose Estimation
【DL輪読会】ViTPose: Simple Vision Transformer Baselines for Human Pose EstimationDeep Learning JP
?
2022/11/18
Deep Learning JP
http://deeplearning.jp/seminar-2/SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~SSII
?
SSII2019 チュートリアル講演
TS3 6月14日(金) 9:00~10:20 (メインホール)
カメラの幾何学的キャリブレーションはカメラを使った3次元計測?認識に欠かすことができない基礎技術です。?近年では LIDAR や ToF カメラのように深度情報を直接出力するカメラや、全周囲カメラのように透視投影ではないカメラをセンサとして使用することも一般的になりました。本講演ではこれらの幾何学的キャリブレーションについて、実例を交えながら基礎からご紹介します。さらに講演内容に対応した初学者向けのサンプルコードについても紹介します。DLゼミ: ViTPose: Simple Vision Transformer Baselines for Human Pose Estimation
DLゼミ: ViTPose: Simple Vision Transformer Baselines for Human Pose Estimationharmonylab
?
公開URL:https://proceedings.neurips.cc/paper_files/paper/2022/file/fbb10d319d44f8c3b4720873e4177c65-Paper-Conference.pdf
出典:Yufei Xu, Jing Zhang, Qiming Zhang, Dacheng Tao : ViTPose: Simple Vision Transformer Baselines for Human Pose Estimation, Advances in Neural Information Processing Systems 35 (NeurIPS 2022), pp. 38571-38584 (2022)
概要:姿勢推定はコンピュータビジョンの1タスクとして知られています。本論文ではプレーンなVision Transformerを使った姿勢推定手法「ViTPose」を提案します。ViTPoseは非階層的なVision Transformerを特徴抽出のために使用し、100Mから1Bのパラメータにスケールアップ可能です。このモデルは事前学習や、複数のポーズタスク対応などにおいて柔軟性を持ち、大規模モデルの知識を小規模モデルに転送することも可能です。実験結果は、ViTPoseがMS COCO Keypoint DetectionベンチマークにおいてSoTAを達成しました。CV勉強会CVPR2019読み会: Video Action Transformer Network
CV勉強会CVPR2019読み会: Video Action Transformer NetworkToshiki Sakai
?
CVPR2019の論文読み会で紹介した、Video Action Transformer Networkに関するスライドです。HoloLens RS4
HoloLens RS4Shinya Tachihara
?
4/17 HoloLens RS4 Preview公開記念勉強会!@アカツキ で登壇した内容です。(一部動画が狠狠撸Shareの仕様上動きませんので、必要に応じてDLしてください。)
https://hololens.connpass.com/event/83943/More Related Content
What's hot (20)
SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 ? TransformerのCompute...
SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 ? TransformerのCompute...SSII
?
SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 ? TransformerのComputer Visionにおける躍進と 肥大化する計算資源 ?
6/10 (木) 14:00~14:30
講師:藤井 亮宏 氏(株式会社エクサウィザーズ)?
概要: Vision Transformer (ViT) が2020年末に発表され、ImageNetの認識精度においてConvolutional Neural Networks (CNN) ベースのモデルをTransformerのみを使ったモデルが凌駕した。それによってTransformerがAlexNet以降画像系タスクを支配していたCNNに取って換わる可能性が高くなったが、ViTでは大量のデータと大規模な計算資源を必要とすることが障壁となっている。本チュートリアル」では、Computer vision (CV) 系のタスクでTransformerの用途とその成果、実活用の視点からCNNとTransformerの比較、今後Transformer x CVの展望、を議論する。
講師による公開場所:
/exwzds/210610-ssiii2021-computer-vision-x-trasnformer画像生成?生成モデル メタサーベイ
画像生成?生成モデル メタサーベイcvpaper. challenge
?
The document presents an overview of the research group 'Generations' focused on image generation and generative models, detailing their contributions to fields like unpaired image-to-image translation and domain adaptation. It highlights various studies and techniques, including CycleGAN and neural radiance fields, aimed at enhancing image translation while preserving contextual integrity. The group is actively seeking new members for collaboration on these innovative themes.3次元レジストレーションの基础と翱辫别苍3顿を用いた3次元点群処理
3次元レジストレーションの基础と翱辫别苍3顿を用いた3次元点群処理Toru Tamaki
?
The document discusses various algorithms and techniques for point cloud registration, including the Iterative Closest Point (ICP) algorithm and its variations in aligning 3D point sets. It references numerous studies and methods for optimizing transformations, particularly focusing on point-to-point and point-to-plane distances. Additionally, it details computational approaches and tools available in programming libraries for effective 3D modeling and transformation estimation.[DL輪読会]Vision Transformer with Deformable Attention (Deformable Attention Tra...
[DL輪読会]Vision Transformer with Deformable Attention (Deformable Attention Tra...Deep Learning JP
?
2022/01/14
Deep Learning JP:
http://deeplearning.jp/seminar-2/SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~SSII
?
SSII2019 チュートリアル講演
TS3 6月14日(金) 9:00~10:20 (メインホール)
カメラの幾何学的キャリブレーションはカメラを使った3次元計測?認識に欠かすことができない基礎技術です。?近年では LIDAR や ToF カメラのように深度情報を直接出力するカメラや、全周囲カメラのように透視投影ではないカメラをセンサとして使用することも一般的になりました。本講演ではこれらの幾何学的キャリブレーションについて、実例を交えながら基礎からご紹介します。さらに講演内容に対応した初学者向けのサンプルコードについても紹介します。物体検知(Meta Study Group 発表資料)
物体検知(Meta Study Group 発表資料)cvpaper. challenge
?
cvpaper.challenge の Meta Study Group 発表スライド
cvpaper.challenge はコンピュータビジョン分野の今を映し、トレンドを創り出す挑戦です。論文サマリ?アイディア考案?議論?実装?論文投稿に取り組み、凡ゆる知識を共有します。2019の目標「トップ会議30+本投稿」「2回以上のトップ会議網羅的サーベイ」
http://xpaperchallenge.org/cv/ Humpback whale identification challenge反省会
Humpback whale identification challenge反省会Yusuke Uchida
?
Humpback whale identification challengeの概要、主要カーネルの説明、Topソリューションの解説です痴颈蝉耻补濒厂贵惭と惭别蝉丑尝补产と颁濒辞耻诲颁辞尘辫补谤别によるドローン撮影画像を用いたデジタル地図作成
痴颈蝉耻补濒厂贵惭と惭别蝉丑尝补产と颁濒辞耻诲颁辞尘辫补谤别によるドローン撮影画像を用いたデジタル地図作成Hiroshi Yamaguchi
?
ドローンで撮影した画像から3次元モデルやデジタル地図を作る方法。第126回 ロボット工学セミナー 三次元点群と深層学習
第126回 ロボット工学セミナー 三次元点群と深層学習Naoya Chiba
?
2020/05/22に開催された,日本ロボット学会 第126回ロボット工学セミナー「ロボットのための画像処理技術」の第4話「三次元点群と深層学習」の発表資料です.
図等を各論文から引用しています.間違いなどあればご指摘頂けるとありがたいです.
https://www.rsj.or.jp/event/seminar/news/2020/s126.html狈耻尘笔测闇入门
狈耻尘笔测闇入门Ryosuke Okuta
?
NumPyのちょっと不思議な挙動などをまとめた資料です。クイズ形式で紹介&解説をします。
PFIセミナー2016/01/28:狈耻尘笔测闇入门
https://www.youtube.com/watch?v=fdLKVMCrzNE
2016/3/20 問題の一部を修正
【DL輪読会】ViTPose: Simple Vision Transformer Baselines for Human Pose Estimation
【DL輪読会】ViTPose: Simple Vision Transformer Baselines for Human Pose EstimationDeep Learning JP
?
2022/11/18
Deep Learning JP
http://deeplearning.jp/seminar-2/SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~SSII
?
SSII2019 チュートリアル講演
TS3 6月14日(金) 9:00~10:20 (メインホール)
カメラの幾何学的キャリブレーションはカメラを使った3次元計測?認識に欠かすことができない基礎技術です。?近年では LIDAR や ToF カメラのように深度情報を直接出力するカメラや、全周囲カメラのように透視投影ではないカメラをセンサとして使用することも一般的になりました。本講演ではこれらの幾何学的キャリブレーションについて、実例を交えながら基礎からご紹介します。さらに講演内容に対応した初学者向けのサンプルコードについても紹介します。DLゼミ: ViTPose: Simple Vision Transformer Baselines for Human Pose Estimation
DLゼミ: ViTPose: Simple Vision Transformer Baselines for Human Pose Estimationharmonylab
?
公開URL:https://proceedings.neurips.cc/paper_files/paper/2022/file/fbb10d319d44f8c3b4720873e4177c65-Paper-Conference.pdf
出典:Yufei Xu, Jing Zhang, Qiming Zhang, Dacheng Tao : ViTPose: Simple Vision Transformer Baselines for Human Pose Estimation, Advances in Neural Information Processing Systems 35 (NeurIPS 2022), pp. 38571-38584 (2022)
概要:姿勢推定はコンピュータビジョンの1タスクとして知られています。本論文ではプレーンなVision Transformerを使った姿勢推定手法「ViTPose」を提案します。ViTPoseは非階層的なVision Transformerを特徴抽出のために使用し、100Mから1Bのパラメータにスケールアップ可能です。このモデルは事前学習や、複数のポーズタスク対応などにおいて柔軟性を持ち、大規模モデルの知識を小規模モデルに転送することも可能です。実験結果は、ViTPoseがMS COCO Keypoint DetectionベンチマークにおいてSoTAを達成しました。Similar to Research modeで取得した深度(Depth)データを可視化する (15)
CV勉強会CVPR2019読み会: Video Action Transformer Network
CV勉強会CVPR2019読み会: Video Action Transformer NetworkToshiki Sakai
?
CVPR2019の論文読み会で紹介した、Video Action Transformer Networkに関するスライドです。HoloLens RS4
HoloLens RS4Shinya Tachihara
?
4/17 HoloLens RS4 Preview公開記念勉強会!@アカツキ で登壇した内容です。(一部動画が狠狠撸Shareの仕様上動きませんので、必要に応じてDLしてください。)
https://hololens.connpass.com/event/83943/3D depth sensor world
3D depth sensor worldKaoru NAKAMURA
?
2018/10/30 3D LiDAR (TOF) Motion Sensor Meetup by 日立LG
でのスライドです。
https://tmcn.connpass.com/event/104736/xR Tech Tokyo 登壇資料 Mixed Realityではじまるコラボレーティブ?コンピューティング
xR Tech Tokyo 登壇資料 Mixed Realityではじまるコラボレーティブ?コンピューティングShinya Tachihara
?
xR Tech Tokyo #8 のロングセッションの資料です。
Mixed Realityのおさらいと、HoloLensとImmerisive、PCを交えたコラボレーティブコンピューティングを実装した話です。HoloLens 2 開発入門 (公式チュートリアルの紹介)
HoloLens 2 開発入門 (公式チュートリアルの紹介)Madoka Chiyoda
?
2020/04/06(月) に開催された、熊本 HoloLens ミートアップでお話しした内容です。
公式チュートリアルはこちら→ http://aka.ms/HL2Tutorial
オレオレ言语実装に役立つプル型础厂罢ウォーカー础笔滨
オレオレ言语実装に役立つプル型础厂罢ウォーカー础笔滨隆行 神戸
?
第14回福岡市西区プログラム勉強会資料(2016/07/03)
Lore言語実装の副産物として汎用ASTライブラリを作成したので紹介した。
(1) シンプルな単一種類ノードのASTに型チェック付きで様々な型のアトリビュートを格納するAST実装
(2) ASTを辿る過程をイベント?ストリームに変換してアクセスすることでイベント駆動でないプル型のアクセスを可能にするASTウォーカーの実装
(先行事例はちゃんと調べてないので「あるある」実装かも。)
Pepper tech festival_2014_技術セッション基本
Pepper tech festival_2014_技術セッション基本Atelier Akihabara
?
2014/09/20に実施した、PepperTechFestivalでの技術セッション(基本)の講演資料となります。
本資料の無断転載を禁じます。すべての著作権はソフトバンクロボティクス株式会社に帰属します。
Presentation Docs for Pepper Tech Festival
Title : Technical Session Basic
SoftBank Robotics Corp. 2014. All rights reserved.HoloLensでCustom Vision Serviceを使ったオフライン推論を試した話
HoloLensでCustom Vision Serviceを使ったオフライン推論を試した話Takahiro Miyaura
?
HoloLensでもWindows 10 April 2018 Update(RS4)が適用可能になり、HoloLensでも学習済みモデルを使ってオフラインで推論が可能になった。
今回はCustom Vision Serviceで学習済みモデルをエクスポートしHoloLensで実行する実験を行った際のTips。チュートリアル:细胞画像を使った初めてのディープラーニング
チュートリアル:细胞画像を使った初めてのディープラーニングDaisukeTakao
?
ディープラーニングで細胞画像を分類する課題を実践できるチュートリアルです。プログラミング経験はほとんどないけどこれから機械学習を始めてみたいという生命科学系の研究者?学生を主な対象としています。ソースコードやサンプルデータを取得できるリンクも記載されています。Google Colabを使うため、ソフトのインストール等も不要で試せます。Ad
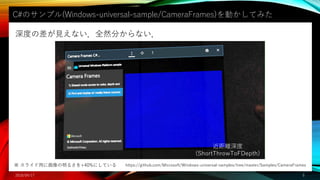
Research modeで取得した深度(Depth)データを可視化する
- 2. 自己紹介 氏名:杉本 宗一郎 所属:TIS株式会社?戦略技術センター 最近作っているもの(個人): ユニティちゃんと鬼ごっこするアプリ (コンテスト応募に向けて最終調整中) 2018/04/17 2
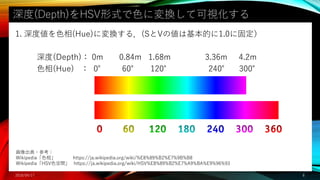
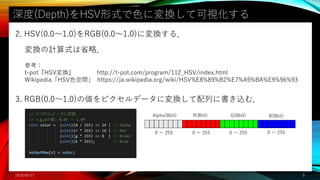
- 8. 深度(Depth)をHSV形式で色に変換して可視化する 2018/04/17 8 画像出典?参考: Wikipedia「色相」 https://ja.wikipedia.org/wiki/%E8%89%B2%E7%9B%B8 Wikipedia「HSV色空間」 https://ja.wikipedia.org/wiki/HSV%E8%89%B2%E7%A9%BA%E9%96%93 1. 深度値を色相(Hue)に変換する.(SとVの値は基本的に1.0に固定) 深度(Depth): 0m 0.84m 1.68m 3.36m 4.2m 色相(Hue) : 0° 60° 120° 240° 300°
- 9. 深度(Depth)をHSV形式で色に変換して可視化する 2018/04/17 9 2. HSV(0.0~1.0)をRGB(0.0~1.0)に変換する. Alpha(8bit) R(8bit) G(8bit) B(8bit) 3. RGB(0.0~1.0)の値をピクセルデータに変換して配列に書き込む. 0 ~ 255 0 ~ 255 0 ~ 255 0 ~ 255 参考: t-pot『HSV変換』 http://t-pot.com/program/112_HSV/index.html Wikipedia「HSV色空間」 https://ja.wikipedia.org/wiki/HSV%E8%89%B2%E7%A9%BA%E9%96%93 変換の計算式は省略.
- 10. 可視化するために試行錯誤して分かったこと 2018/04/17 10 下記の値から計算した深度値の有効範囲は 0.001 ~ 65.535mだが, 実際の有効範囲より大きすぎるため,可視化にはあまり使えない. DepthMediaFrame.DepthFormat.DepthScaleInMeters: 0.001 DepthMediaFrame.MinReliableDepth: 1 DepthMediaFrame.MaxReliableDepth: 65535 MinReliableDepthとMaxReliableDepthは固定値であり,実行時の 変化は特にない.
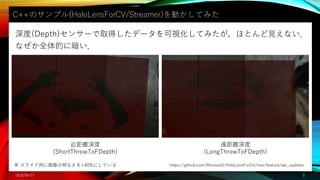
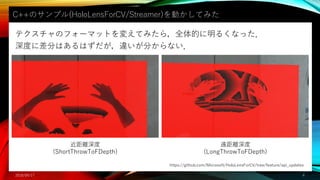
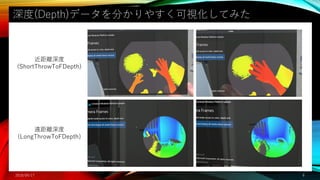
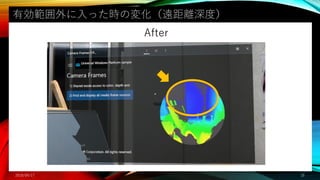
- 11. 可視化するために試行錯誤して分かったこと 2018/04/17 11 深度情報のフォーマット: - 16bit 符号なし整数 (0 ~ 65535) - 単位: ミリメートル (mm) 深度値の有効範囲(検証結果から推定): - 近距離(ShortThrowToFDepth):0.156 ~ 0.95 m - 遠距離(LongThrowToFDepth) : 0.95 ~ 3.52 m 有効範囲外の深度値を持つピクセルには最大深度値(?)として 4.091~4.095 m が設定される.
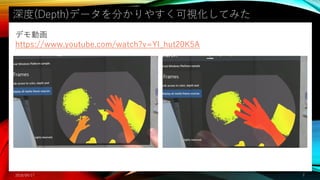
- 16. まとめ ? Research modeで取得した深度情報を分かりやすく可視化できた ? 明暗の違いよりも色の違いの方が識別しやすい ? 深度情報の形式と値の有効範囲が分かった ? 深度値の有効範囲については追加検証した方が良いかもしれない (or 公式情報を待つ) 2018/04/17 16
- 17. ありがとうございました