

![// mw.c
void loop(void)
{
:
// 3.5ms ņŻ╝ĻĖ░ļĪ£ annexCode() ĒĢ©ņłśļź╝ ĒśĖņČ£ĒĢ©.
if (mcfg.looptime == 0 || (int32_t)(currentTime - loopTime) >=
0)
{
loopTime = currentTime + mcfg.looptime;
computeIMU();
annexCode();
}
:
// cli.c
const clivalue_t valueTable[] = {
{ "looptime", VAR_UINT16, &mcfg.looptime, 0, 9000 },
:
}
// config.c
static void resetConf(void)
{
:
mcfg.looptime = 3500;
:
}](https://image.slidesharecdn.com/smartrover-141223101530-conversion-gate01/85/Smart-rover-7-320.jpg)





![[ļō£ļĪĀ] ĒÄīņø©ņ¢┤ ļČäņäØ [2015.5.23]](https://cdn.slidesharecdn.com/ss_thumbnails/v2-150524160009-lva1-app6891-thumbnail.jpg?width=560&fit=bounds)





























More Related Content
What's hot (20)


















Smart rover ĒåĄņŗĀ ļČäņäØ
- 2. ļ¬®ņ░© ŌĆó H/W ĻĄ¼ņä▒ ŌĆó H/W ĒåĄņŗĀ ņé¼ņ¢æ ŌĆó ĒåĄņŗĀ F/W ĒØÉļ”äļÅä ŌĆó UART ĒåĄņŗĀ ĒĢ©ņłś ĻĄ¼ņä▒ ŌĆó ĒåĄņŗĀ Ēī©ĒéĘ ņ▓śļ”¼ ļ░®ļ▓Ģ ŌĆó UART ĒåĄņŗĀ Ēī©ĒéĘ ĒśĢņŗØ ŌĆó UART ĒåĄņŗĀ ņØæļŗĄ ņ▓śļ”¼ ĒĢ©ņłś ŌĆó USB VCOM ĒåĄņŗĀ ņäĖļČĆ ĻĄ¼ņä▒ ŌĆó USB VCOM ĒåĄņŗĀ ŌĆó MSP(Multiwii Serial Protocol) ŌĆó HexAirBot Protocol ŌĆó Ē¢źĒøä ņČöĻ░ĆĒĢ┤ņĢ╝ ĒĢĀ ĒåĄņŗĀ ĻĖ░ļŖź ŌĆó ņ░ĖĻ│Ā ņ×ÉļŻī
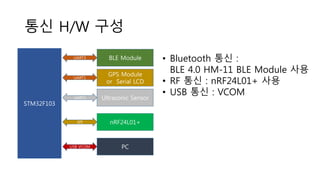
- 3. ĒåĄņŗĀ H/W ĻĄ¼ņä▒ STM32F103 BLE ModuleUART3 GPS Module or Serial LCD UART1 Ultrasonic SensorUART2 nRF24L01+SPI ŌĆó Bluetooth ĒåĄņŗĀ : BLE 4.0 HM-11 BLE Module ņé¼ņÜ® ŌĆó RF ĒåĄņŗĀ : nRF24L01+ ņé¼ņÜ® ŌĆó USB ĒåĄņŗĀ : VCOM PCUSB VCOM
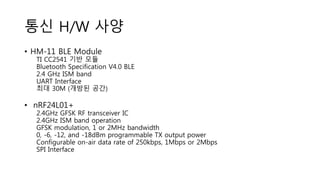
- 4. ĒåĄņŗĀ H/W ņé¼ņ¢æ ŌĆó HM-11 BLE Module TI CC2541 ĻĖ░ļ░ś ļ¬©ļōł Bluetooth Specification V4.0 BLE 2.4 GHz ISM band UART Interface ņĄ£ļīĆ 30M (Ļ░£ļ░®ļÉ£ Ļ│ĄĻ░ä) ŌĆó nRF24L01+ 2.4GHz GFSK RF transceiver IC 2.4GHz ISM band operation GFSK modulation, 1 or 2MHz bandwidth 0, -6, -12, and -18dBm programmable TX output power Configurable on-air data rate of 250kbps, 1Mbps or 2Mbps SPI Interface
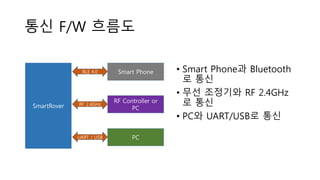
- 5. ĒåĄņŗĀ F/W ĒØÉļ”äļÅä ŌĆó Smart PhoneĻ│╝ Bluetooth ļĪ£ ĒåĄņŗĀ ŌĆó ļ¼┤ņäĀ ņĪ░ņĀĢĻĖ░ņÖĆ RF 2.4GHz ļĪ£ ĒåĄņŗĀ ŌĆó PCņÖĆ UART/USBļĪ£ ĒåĄņŗĀ SmartRover Smart PhoneBLE 4.0 RF Controller or PC RF 2.4GHz PCUART / USB
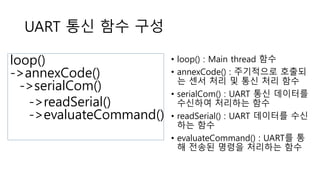
- 6. UART ĒåĄņŗĀ ĒĢ©ņłś ĻĄ¼ņä▒ loop() ->annexCode() ->serialCom() ->readSerial() ->evaluateCommand() ŌĆó loop() : Main thread ĒĢ©ņłś ŌĆó annexCode() : ņŻ╝ĻĖ░ņĀüņ£╝ļĪ£ ĒśĖņČ£ļÉś ļŖö ņä╝ņä£ ņ▓śļ”¼ ļ░Å ĒåĄņŗĀ ņ▓śļ”¼ ĒĢ©ņłś ŌĆó serialCom() : UART ĒåĄņŗĀ ļŹ░ņØ┤Ēä░ļź╝ ņłśņŗĀĒĢśņŚ¼ ņ▓śļ”¼ĒĢśļŖö ĒĢ©ņłś ŌĆó readSerial() : UART ļŹ░ņØ┤Ēä░ļź╝ ņłśņŗĀ ĒĢśļŖö ĒĢ©ņłś ŌĆó evaluateCommand() : UARTļź╝ ĒåĄ ĒĢ┤ ņĀäņåĪļÉ£ ļ¬ģļĀ╣ņØä ņ▓śļ”¼ĒĢśļŖö ĒĢ©ņłś
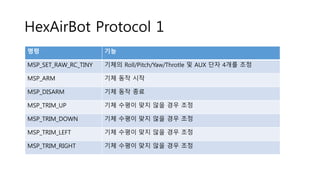
- 7. // mw.c void loop(void) { : // 3.5ms ņŻ╝ĻĖ░ļĪ£ annexCode() ĒĢ©ņłśļź╝ ĒśĖņČ£ĒĢ©. if (mcfg.looptime == 0 || (int32_t)(currentTime - loopTime) >= 0) { loopTime = currentTime + mcfg.looptime; computeIMU(); annexCode(); } : // cli.c const clivalue_t valueTable[] = { { "looptime", VAR_UINT16, &mcfg.looptime, 0, 9000 }, : } // config.c static void resetConf(void) { : mcfg.looptime = 3500; : }
- 8. ĒåĄņŗĀ Ēī©ĒéĘ ņ▓śļ”¼ ļ░®ļ▓Ģ ŌĆó UARTļĪ£ ņłśņŗĀļÉ£ ļŹ░ņØ┤Ēä░ļōżņØä ļČäņäØ ĒĢ┤ņä£ ļ¬ģļĀ╣ņØä ņČöņČ£ĒĢ┤ ļāä. ŌĆó serialCom() ĒĢ©ņłśņŚÉņä£ ņłśĒ¢ēĒĢ©. ŌĆó ļ¬ģļĀ╣ņØ┤ ņČöņČ£ Ēøä evaluateCommand() ĒĢ©ņłśļź╝ ĒśĖņČ£ ĒĢ┤ ļ¬ģļĀ╣ņØä ņłśĒ¢ēĒĢ©.
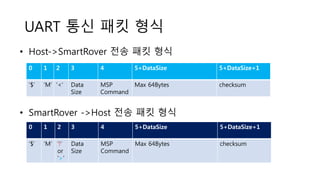
- 9. UART ĒåĄņŗĀ Ēī©ĒéĘ ĒśĢņŗØ 0 1 2 3 4 5+DataSize 5+DataSize+1 ŌĆś$ŌĆÖ ŌĆśMŌĆÖ ŌĆś<ŌĆś Data Size MSP Command Max 64Bytes checksum ŌĆó Host->SmartRover ņĀäņåĪ Ēī©ĒéĘ ĒśĢņŗØ ŌĆó SmartRover ->Host ņĀäņåĪ Ēī©ĒéĘ ĒśĢņŗØ 0 1 2 3 4 5+DataSize 5+DataSize+1 ŌĆś$ŌĆÖ ŌĆśMŌĆÖ ŌĆś!ŌĆÖ or ŌĆś>ŌĆÖ Data Size MSP Command Max 64Bytes checksum
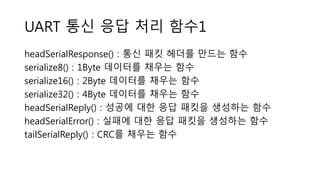
- 10. UART ĒåĄņŗĀ ņØæļŗĄ ņ▓śļ”¼ ĒĢ©ņłś1 headSerialResponse() : ĒåĄņŗĀ Ēī©ĒéĘ ĒŚżļŹöļź╝ ļ¦īļō£ļŖö ĒĢ©ņłś serialize8() : 1Byte ļŹ░ņØ┤Ēä░ļź╝ ņ▒äņÜ░ļŖö ĒĢ©ņłś serialize16() : 2Byte ļŹ░ņØ┤Ēä░ļź╝ ņ▒äņÜ░ļŖö ĒĢ©ņłś serialize32() : 4Byte ļŹ░ņØ┤Ēä░ļź╝ ņ▒äņÜ░ļŖö ĒĢ©ņłś headSerialReply() : ņä▒Ļ│ĄņŚÉ ļīĆĒĢ£ ņØæļŗĄ Ēī©ĒéĘņØä ņāØņä▒ĒĢśļŖö ĒĢ©ņłś headSerialError() : ņŗżĒī©ņŚÉ ļīĆĒĢ£ ņØæļŗĄ Ēī©ĒéĘņØä ņāØņä▒ĒĢśļŖö ĒĢ©ņłś tailSerialReply() : CRCļź╝ ņ▒äņÜ░ļŖö ĒĢ©ņłś
- 11. UART ĒåĄņŗĀ ņØæļŗĄ ņ▓śļ”¼ ĒĢ©ņłś2
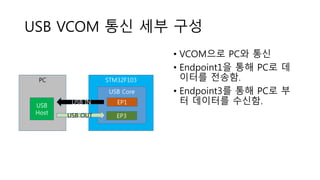
- 12. USB VCOM ĒåĄņŗĀ ņäĖļČĆ ĻĄ¼ņä▒ ŌĆó VCOMņ£╝ļĪ£ PCņÖĆ ĒåĄņŗĀ ŌĆó Endpoint1ņØä ĒåĄĒĢ┤ PCļĪ£ ļŹ░ ņØ┤Ēä░ļź╝ ņĀäņåĪĒĢ©. ŌĆó Endpoint3ļź╝ ĒåĄĒĢ┤ PCļĪ£ ļČĆ Ēä░ ļŹ░ņØ┤Ēä░ļź╝ ņłśņŗĀĒĢ©. PC STM32F103 USB Host USB Core EP1 EP3USB OUT USB IN
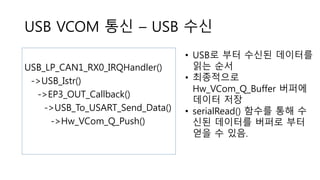
- 13. USB VCOM ĒåĄņŗĀ ŌĆō USB ņłśņŗĀ USB_LP_CAN1_RX0_IRQHandler() ->USB_Istr() ->EP3_OUT_Callback() ->USB_To_USART_Send_Data() ->Hw_VCom_Q_Push() ŌĆó USBļĪ£ ļČĆĒä░ ņłśņŗĀļÉ£ ļŹ░ņØ┤Ēä░ļź╝ ņØĮļŖö ņł£ņä£ ŌĆó ņĄ£ņóģņĀüņ£╝ļĪ£ Hw_VCom_Q_Buffer ļ▓äĒŹ╝ņŚÉ ļŹ░ņØ┤Ēä░ ņĀĆņן ŌĆó serialRead() ĒĢ©ņłśļź╝ ĒåĄĒĢ┤ ņłś ņŗĀļÉ£ ļŹ░ņØ┤Ēä░ļź╝ ļ▓äĒŹ╝ļĪ£ ļČĆĒä░ ņ¢╗ņØä ņłś ņ׳ņØī.
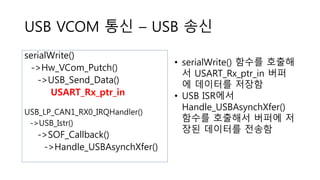
- 14. USB VCOM ĒåĄņŗĀ ŌĆō USB ņåĪņŗĀ serialWrite() ->Hw_VCom_Putch() ->USB_Send_Data() USART_Rx_ptr_in USB_LP_CAN1_RX0_IRQHandler() ->USB_Istr() ->SOF_Callback() ->Handle_USBAsynchXfer() ŌĆó serialWrite() ĒĢ©ņłśļź╝ ĒśĖņČ£ĒĢ┤ ņä£ USART_Rx_ptr_in ļ▓äĒŹ╝ ņŚÉ ļŹ░ņØ┤Ēä░ļź╝ ņĀĆņןĒĢ© ŌĆó USB ISRņŚÉņä£ Handle_USBAsynchXfer() ĒĢ©ņłśļź╝ ĒśĖņČ£ĒĢ┤ņä£ ļ▓äĒŹ╝ņŚÉ ņĀĆ ņןļÉ£ ļŹ░ņØ┤Ēä░ļź╝ ņĀäņåĪĒĢ©
- 15. MSP(Multiwii Serial Protocol) 1 ŌĆó MSPļŖö Multiwii Corpter ņśżĒöłņåīņŖżņŚÉņä£ ņé¼ņÜ®ļÉśļŖö ņŗ£ļ”¼ņ¢╝ ĒåĄņŗĀ ĒöäļĪ£ĒåĀņĮ£ ŌĆó Multiwii ConfigņŚÉņä£ ņé¼ņÜ® ŌĆó Host’āĀFCļĪ£ ņĀäņåĪĒĢśļŖö ļ®öņŗ£ņ¦ĆņÖĆ FC’āĀHostļĪ£ ņĀäņåĪĒĢśļŖö ļ®öņŗ£ņ¦ĆļĪ£ ĻĄ¼ņä▒ ŌĆó SmartRoverļŖö UARTļĪ£ MSP ĒåĄņŗĀ
- 16. MSP 2
- 17. MSP 3
- 18. MSP 4
- 19. HexAirBot Protocol 1 ļ¬ģļĀ╣ ĻĖ░ļŖź MSP_SET_RAW_RC_TINY ĻĖ░ņ▓┤ņØś Roll/Pitch/Yaw/Throtle ļ░Å AUX ļŗ©ņ×É 4Ļ░£ļź╝ ņĪ░ņĀĢ MSP_ARM ĻĖ░ņ▓┤ ļÅÖņ×æ ņŗ£ņ×æ MSP_DISARM ĻĖ░ņ▓┤ ļÅÖņ×æ ņóģļŻī MSP_TRIM_UP ĻĖ░ņ▓┤ ņłśĒÅēņØ┤ ļ¦×ņ¦Ć ņĢŖņØä Ļ▓ĮņÜ░ ņĪ░ņĀĢ MSP_TRIM_DOWN ĻĖ░ņ▓┤ ņłśĒÅēņØ┤ ļ¦×ņ¦Ć ņĢŖņØä Ļ▓ĮņÜ░ ņĪ░ņĀĢ MSP_TRIM_LEFT ĻĖ░ņ▓┤ ņłśĒÅēņØ┤ ļ¦×ņ¦Ć ņĢŖņØä Ļ▓ĮņÜ░ ņĪ░ņĀĢ MSP_TRIM_RIGHT ĻĖ░ņ▓┤ ņłśĒÅēņØ┤ ļ¦×ņ¦Ć ņĢŖņØä Ļ▓ĮņÜ░ ņĪ░ņĀĢ
- 20. HexAirBot Protocol 2 ļ¬ģļĀ╣ ĻĖ░ļŖź MSP_TRIM_UP_FAST ĻĖ░ņ▓┤ ņłśĒÅēņØ┤ ļ¦×ņ¦Ć ņĢŖņØä Ļ▓ĮņÜ░ ņĪ░ņĀĢ MSP_TRIM_DOWN_FAST ĻĖ░ņ▓┤ ņłśĒÅēņØ┤ ļ¦×ņ¦Ć ņĢŖņØä Ļ▓ĮņÜ░ ņĪ░ņĀĢ MSP_TRIM_LEFT_FAST ĻĖ░ņ▓┤ ņłśĒÅēņØ┤ ļ¦×ņ¦Ć ņĢŖņØä Ļ▓ĮņÜ░ ņĪ░ņĀĢ MSP_TRIM_RIGHT_FAST ĻĖ░ņ▓┤ ņłśĒÅēņØ┤ ļ¦×ņ¦Ć ņĢŖņØä Ļ▓ĮņÜ░ ņĪ░ņĀĢ MSP_READ_TEST_PARAM ĒģīņŖżĒŖĖņÜ® MSP_SET_TEST_PARAM ĒģīņŖżĒŖĖņÜ® MSP_HEX_NANO ĻĖ░ņ▓┤ņØś ņĀĢļ│┤ļź╝ ņĀäļŗ¼
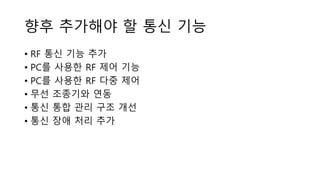
- 21. Ē¢źĒøä ņČöĻ░ĆĒĢ┤ņĢ╝ ĒĢĀ ĒåĄņŗĀ ĻĖ░ļŖź ŌĆó RF ĒåĄņŗĀ ĻĖ░ļŖź ņČöĻ░Ć ŌĆó PCļź╝ ņé¼ņÜ®ĒĢ£ RF ņĀ£ņ¢┤ ĻĖ░ļŖź ŌĆó PCļź╝ ņé¼ņÜ®ĒĢ£ RF ļŗżņżæ ņĀ£ņ¢┤ ŌĆó ļ¼┤ņäĀ ņĪ░ņóģĻĖ░ņÖĆ ņŚ░ļÅÖ ŌĆó ĒåĄņŗĀ ĒåĄĒĢ® Ļ┤Ćļ”¼ ĻĄ¼ņĪ░ Ļ░£ņäĀ ŌĆó ĒåĄņŗĀ ņןņĢĀ ņ▓śļ”¼ ņČöĻ░Ć
- 22. ņ░ĖĻ│Ā ņ×ÉļŻī ŌĆó MultiWii Protocol http://www.multiwii.com/wiki/index.php?title=Multiwii_Serial_Protocol ŌĆó HexAirBot Protocol http://www.flexbot.cc/wiki/index.php?title=Main_Page ŌĆó Bitcraze http://www.bitcraze.se/ http://wiki.bitcraze.se/ ŌĆó Bluetooth-V40-HM11-BLE-Module Ļ┤ĆļĀ© http://www.seeedstudio.com/depot/Bluetooth-V40-HM11-BLE-Module-p- 1803.html http://www.seeedstudio.com/wiki/Bluetooth_V4.0_HM-11_BLE_Module ŌĆó RF ņ╣® ļ░Å ĒåĄņŗĀ Ļ┤ĆļĀ© ņ×ÉļŻī http://www.nordicsemi.com/eng/Products/2.4GHz-RF/nRF24L01P