Job4
Download as docx, pdf0 likes517 views

Dokumen ini adalah petunjuk praktikum untuk mata kuliah teknik elektro di Politeknik Negeri Pontianak, yang mencakup tugas menganalisis sistem ordo dua menggunakan MATLAB. Mahasiswa diharapkan dapat menghitung dan menggambarkan karakteristik sistem seperti damping ratio, natural frequency, dan step response. Laporan akhir harus disusun dengan format terstruktur dan diserahkan paling lambat minggu keempat.
![POLITEKNIK NEGERI PONTIANAK
LAB. TEKNIK ELEKTRONIKA SEMESTER : V
JURUSAN TEKNIK ELEKTRO NO JOB : 4 WAKTU : 8 JAM
RESPONS WAKTU
Gambar 3. Fungsi transfer untuk percobaan 2
V. PROSEDUR PERCOBAAN
PERCOBAAN 1
Kita dapat menggunakan MATLAB untuk menghitung karakteristik dari sistem
ordo 2, seperti damping ratio (ζ), natural frekwensi (ωn), peak time (Tp), percent
overshoot (%OS) dan settling time (Ts). Ketikan program dibawah ini:
‘ PERCOBAAN 1’ %Display label.
p1=[ 1 3+7*i]; %Mendefinisikan polinomial yang
% berisi pole pertama.
p2=[ 1 3-7*i]; %Mendefinisikan polinomial yang
% berisi pole kedua.
deng=conv(p1,p2) %Mengalikan kedua polinomial
% untuk menghitung polinomial
% orde kedua
%as^2+bs+c.
omegan=sqrt(deng(3)/deng(1)) %Menghitung natural frekwensi
%sqrt(c/a).
zeta=(deng(2)/deng(1))/(2*omegan) %Menghitung damping rasio
%((b/a)/2*wn).
Ts=4/(zeta*omegan) %Menghitung settling time
%(4/z*wn).
Tp=pi/(omegan*sqrt(1-zeta^2)) %Menghitung peak Time
%pi/wn*sqrt(1-z^2).
pos=100*exp(-zeta*pi/sqrt(1-zeta^2)) %Menghitung persen overshoot
%(100*e^(z*pi/sqrt(1-z^2)).
pause
Tugas: Buatlah program untuk gambar 2.
PERCOBAAN 2
Kita dapat menggunakan MATLAB untuk mendapatkan step respon dari
sistem. Kita mendapatkan sebuah plot step response dari fungsi transfer, T(s) =
num/den, menggunakan perintah step(T) dimana T adalah objek fungsi
transfer LTI. Berbagai plot didapatkan pula melalui step(T1, T2, … )
Informasi mengenai plot didapatkan melalui step(T) dapat dilihat dengan
melakukan klik kanan mouse pada kurva. Kamu dapat menemukan label kurva dan
juga koordinat poin yang kamu klik. Klik kanan di luar kanan akan membawa kita
ada menu. Dari menu tersebut, dapat dipilih 1. Sistem respons yang akan ditampilkan
dan respons karakteristik yang akan ditampilkan, seperti peak response. Ketika
dipilih, sebuah titik muncul pada kurva. Biarkan mousemu berada pada titik tersebut,
dan bacalah nilai karakteristik yang muncul. Kamu juga boleh memilih (3) pilihan
Petunjuk Praktikum Sistem Kendali 1 - 2009](https://image.slidesharecdn.com/job4-111204225555-phpapp01/85/Job4-2-320.jpg)
![POLITEKNIK NEGERI PONTIANAK
LAB. TEKNIK ELEKTRONIKA SEMESTER : V
JURUSAN TEKNIK ELEKTRO NO JOB : 4 WAKTU : 8 JAM
RESPONS WAKTU
untuk grid on atau off, (4) pilhan untuk menormalkan kurva, dan (5). Properties,
seperti label, limit, unit, style dan karakteristik.
Jika kita menambah pada sisi kiri, [y,t]=step(T), kita menciptakan
vektor yang berisi poin dari plot, dimana y adalah kelauaran vektor dan t adalah
vektor waktu. Untuk kasus ini, sebuah plot tidak akan dibuat sebelum perintah
plot(t,y) diberikan, dimana asumsi yang muncul adalah kita akan membuat
plot keluaran(y) melawan waktu(t). Kita dapat memberi nama label, sumbu x dan y
dengan title(‘ab’), xlabel(‘ab’) dan ylabel(‘ab’). Perintah
clf akan membersihkan grafik sesuai dengan prioritas ploting. Akhirnya tulisan
dapat diberikan dimanapun pada sebuah grafik dengan perintah
text(X,Y,’tulisan’), dimana (X,Y) adalah koordinat dimana ‘tulisan’ akan
diletakan. Ketikan program dibawah ini:
‘ PERCOBAAN 2’ %Display label.
‘ Test Run’ %Display label.
clf %Membersihkan grafik.
numt1=[24.542]; %Mendefinisikan numerator T1.
dent1=[1 4 24.542]; %Mendefiniskan denumerator T1.
‘T1(s)’ %Display label.
T1=tf(numt1, dent1) %Membuat & menampilkan T1.
step(T1) %Menjalankan demonstrasi plot
%step respons.
title(‘Test Run of T1(s)’) %Menambahkan judul pada grafik.
pause
‘Complete Run’ %Display label.
[y1,t1]=step(T1); %Menjalankan step respons dari T1
%Dan mengumpulkan poin.
numt2=[245.42]; %Mendefinisikan numerator T2.
p1=[1 10]; %Mendefinisikan (s+10) pada
%denumerator T2.
p2=[1 4 24.542]; %Mendefinisikan (s^2+4s+24.542)
% pada denumerator T2.
dent2=conv(p1 p2); %Mengalikan (s+10)(s^2+4s+24.542).
%pada denumerator T2.
‘T2(s)’ %Display label.
T2=tf(numt2, dent2) %Membuat & menampilkan T2.
[y2,t2]=step(T2); %Menjalankan step respons dari T2
%Dan mengumpulkan poin.
numt3=[73.626]; %Mendefinisikan numerator T3.
p3=[1 3]; %Mendefinisikan (s+3) pada
%denumerator T3.
dent3=conv(p3 p2); %Mengalikan (s+3)(s^2+4s+24.542).
%pada denumerator T3.
‘T3(s)’ %Display label.
T3=tf(numt3, dent3) %Membuat & menampilkan T3.
[y3,t3]=step(T3); %Menjalankan step respons dari T3
%Dan mengumpulkan poin.
clf %Membersihkan grafik.
plot(t1,y1,t2,y2,t3,y3) %Membuat 3 plot pada satu grafik
title(‘Step Response dari T1(s),T2(s) dan T3(s)’)
%Menambahkan judul pada grafik.
Petunjuk Praktikum Sistem Kendali 1 - 2009](https://image.slidesharecdn.com/job4-111204225555-phpapp01/85/Job4-3-320.jpg)

Job4
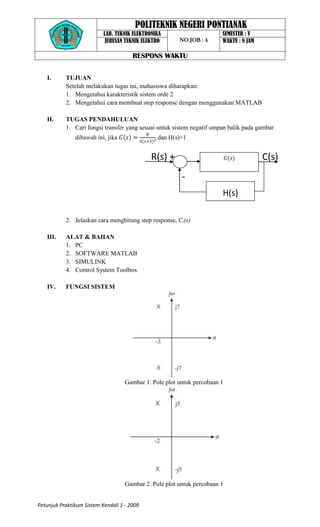
- 1. POLITEKNIK NEGERI PONTIANAK LAB. TEKNIK ELEKTRONIKA SEMESTER : V JURUSAN TEKNIK ELEKTRO NO JOB : 4 WAKTU : 8 JAM RESPONS WAKTU I. TUJUAN Setelah melakukan tugas ini, mahasiswa diharapkan: 1. Mengetahui karakteristik sistem orde 2 2. Mengetahui cara membuat step response dengan menggunakan MATLAB II. TUGAS PENDAHULUAN 1. Cari fungsi transfer yang sesuai untuk sistem negatif umpan balik pada gambar dibawah ini, jika dan H(s)=1 R(s) + C(s) - H(s) 2. Jelaskan cara menghitung step response, Ci(s) III. ALAT & BAHAN 1. PC 2. SOFTWARE MATLAB 3. SIMULINK 4. Control System Toolbox IV. FUNGSI SISTEM Gambar 1. Pole plot untuk percobaan 1 Gambar 2. Pole plot untuk percobaan 1 Petunjuk Praktikum Sistem Kendali 1 - 2009
- 2. POLITEKNIK NEGERI PONTIANAK LAB. TEKNIK ELEKTRONIKA SEMESTER : V JURUSAN TEKNIK ELEKTRO NO JOB : 4 WAKTU : 8 JAM RESPONS WAKTU Gambar 3. Fungsi transfer untuk percobaan 2 V. PROSEDUR PERCOBAAN PERCOBAAN 1 Kita dapat menggunakan MATLAB untuk menghitung karakteristik dari sistem ordo 2, seperti damping ratio (ζ), natural frekwensi (ωn), peak time (Tp), percent overshoot (%OS) dan settling time (Ts). Ketikan program dibawah ini: ‘ PERCOBAAN 1’ %Display label. p1=[ 1 3+7*i]; %Mendefinisikan polinomial yang % berisi pole pertama. p2=[ 1 3-7*i]; %Mendefinisikan polinomial yang % berisi pole kedua. deng=conv(p1,p2) %Mengalikan kedua polinomial % untuk menghitung polinomial % orde kedua %as^2+bs+c. omegan=sqrt(deng(3)/deng(1)) %Menghitung natural frekwensi %sqrt(c/a). zeta=(deng(2)/deng(1))/(2*omegan) %Menghitung damping rasio %((b/a)/2*wn). Ts=4/(zeta*omegan) %Menghitung settling time %(4/z*wn). Tp=pi/(omegan*sqrt(1-zeta^2)) %Menghitung peak Time %pi/wn*sqrt(1-z^2). pos=100*exp(-zeta*pi/sqrt(1-zeta^2)) %Menghitung persen overshoot %(100*e^(z*pi/sqrt(1-z^2)). pause Tugas: Buatlah program untuk gambar 2. PERCOBAAN 2 Kita dapat menggunakan MATLAB untuk mendapatkan step respon dari sistem. Kita mendapatkan sebuah plot step response dari fungsi transfer, T(s) = num/den, menggunakan perintah step(T) dimana T adalah objek fungsi transfer LTI. Berbagai plot didapatkan pula melalui step(T1, T2, … ) Informasi mengenai plot didapatkan melalui step(T) dapat dilihat dengan melakukan klik kanan mouse pada kurva. Kamu dapat menemukan label kurva dan juga koordinat poin yang kamu klik. Klik kanan di luar kanan akan membawa kita ada menu. Dari menu tersebut, dapat dipilih 1. Sistem respons yang akan ditampilkan dan respons karakteristik yang akan ditampilkan, seperti peak response. Ketika dipilih, sebuah titik muncul pada kurva. Biarkan mousemu berada pada titik tersebut, dan bacalah nilai karakteristik yang muncul. Kamu juga boleh memilih (3) pilihan Petunjuk Praktikum Sistem Kendali 1 - 2009
- 3. POLITEKNIK NEGERI PONTIANAK LAB. TEKNIK ELEKTRONIKA SEMESTER : V JURUSAN TEKNIK ELEKTRO NO JOB : 4 WAKTU : 8 JAM RESPONS WAKTU untuk grid on atau off, (4) pilhan untuk menormalkan kurva, dan (5). Properties, seperti label, limit, unit, style dan karakteristik. Jika kita menambah pada sisi kiri, [y,t]=step(T), kita menciptakan vektor yang berisi poin dari plot, dimana y adalah kelauaran vektor dan t adalah vektor waktu. Untuk kasus ini, sebuah plot tidak akan dibuat sebelum perintah plot(t,y) diberikan, dimana asumsi yang muncul adalah kita akan membuat plot keluaran(y) melawan waktu(t). Kita dapat memberi nama label, sumbu x dan y dengan title(‘ab’), xlabel(‘ab’) dan ylabel(‘ab’). Perintah clf akan membersihkan grafik sesuai dengan prioritas ploting. Akhirnya tulisan dapat diberikan dimanapun pada sebuah grafik dengan perintah text(X,Y,’tulisan’), dimana (X,Y) adalah koordinat dimana ‘tulisan’ akan diletakan. Ketikan program dibawah ini: ‘ PERCOBAAN 2’ %Display label. ‘ Test Run’ %Display label. clf %Membersihkan grafik. numt1=[24.542]; %Mendefinisikan numerator T1. dent1=[1 4 24.542]; %Mendefiniskan denumerator T1. ‘T1(s)’ %Display label. T1=tf(numt1, dent1) %Membuat & menampilkan T1. step(T1) %Menjalankan demonstrasi plot %step respons. title(‘Test Run of T1(s)’) %Menambahkan judul pada grafik. pause ‘Complete Run’ %Display label. [y1,t1]=step(T1); %Menjalankan step respons dari T1 %Dan mengumpulkan poin. numt2=[245.42]; %Mendefinisikan numerator T2. p1=[1 10]; %Mendefinisikan (s+10) pada %denumerator T2. p2=[1 4 24.542]; %Mendefinisikan (s^2+4s+24.542) % pada denumerator T2. dent2=conv(p1 p2); %Mengalikan (s+10)(s^2+4s+24.542). %pada denumerator T2. ‘T2(s)’ %Display label. T2=tf(numt2, dent2) %Membuat & menampilkan T2. [y2,t2]=step(T2); %Menjalankan step respons dari T2 %Dan mengumpulkan poin. numt3=[73.626]; %Mendefinisikan numerator T3. p3=[1 3]; %Mendefinisikan (s+3) pada %denumerator T3. dent3=conv(p3 p2); %Mengalikan (s+3)(s^2+4s+24.542). %pada denumerator T3. ‘T3(s)’ %Display label. T3=tf(numt3, dent3) %Membuat & menampilkan T3. [y3,t3]=step(T3); %Menjalankan step respons dari T3 %Dan mengumpulkan poin. clf %Membersihkan grafik. plot(t1,y1,t2,y2,t3,y3) %Membuat 3 plot pada satu grafik title(‘Step Response dari T1(s),T2(s) dan T3(s)’) %Menambahkan judul pada grafik. Petunjuk Praktikum Sistem Kendali 1 - 2009
- 4. POLITEKNIK NEGERI PONTIANAK LAB. TEKNIK ELEKTRONIKA SEMESTER : V JURUSAN TEKNIK ELEKTRO NO JOB : 4 WAKTU : 8 JAM RESPONS WAKTU xlabel(‘Waktu(detik)’) %Menambahkan judul pada sumbu x. ylabel(‘Respons normalisasi’) %Menambah judul pada sumbu y. text(0.7,0.7, ’c3(t)’) %Menambah label step respons T3. text(0.7,1.1, ’c2(t)’) %Menambah label step respons T2. text(0.5,1.3, ’c1(t)’) %Menambah label step respons T1. pause step(T1,T2,T3) %menggunakan metode alternatif %memplot step respons title(‘Step Response dari T1(s),T2(s) dan T3(s)’) %Menambahkan judul pada grafik. pause VI. TABEL DATA Tabel percobaan 1 Masukan Orde 2 Keluaran Gambar Pole 1 Pole 2 A b C ζ ωn Tp %OS Ts 1 2 Tabel percobaan 2 Masukan Keluaran No Numerator Denumerator Sistem respons 1 VII. TUGAS Gunakan MATLAB untuk setiap sistem ordo kedua, cari damping ratio (ζ), natural frekwensi (ωn), peak time (Tp), percent overshoot (%OS), rise time (Tr) dan settling time (Ts). Plot juga step response. a. b. c. VIII. LAPORAN Buat laporan terstruktur, dengan pola: Judul percobaan & nama penulis laporan (dibawah judul) Abstraksi (berikan abstraksi dari percobaan) Pendahuluan (berisi latar belakang percobaan) Landasan Teori (teori yang berkaitan dengan percobaan) Langkah-langkah percobaan (jelaskan tata cara percobaan) Analisa dan hasil (termasuk semua output) Kesimpulan Laporan diketik rapi, A4, Times New roman, 1.5 spasi. Tidak diperbolehkan tulisan pen. Gunakan halaman pengumulan tugas (ketik rapi), dikumpulkan paling lambat minggu 4. Petunjuk Praktikum Sistem Kendali 1 - 2009