Google Tango§« ¨FĆg ņĹÁ§Úł–§ł§∆§Ŗ§Ť§¶
Download as pptx, pdf2 likes1,753 views

SLAM(V-SLAM)§őłŇ“™§»Google Tango§őļÜÖg§ Ćg◊įĹ‚’h§«§Ļ°£












![ADF’iřz
private AreaDescription FindAreaDescription()
{
//DebugPrint("PopulateList start", false);
AreaDescription[] list = AreaDescription.GetList();
AreaDescription foundADF = null;
//DebugPrint("Length = " + list.Length, false);
if (list != null && list.Length > 0)
{
foreach (AreaDescription areaDescription in list)
{
AreaDescription.Metadata metadata = areaDescription.GetMetadata();
if (metadata.m_name == FILE_NAME)
{
foundADF = areaDescription;
//DebugPrint("found uuid = " + foundADF.m_uuid, false);
break;
}
}
}
if (foundADF == null)
{
//DebugPrint("No area descriptions available.", false);
}
return foundADF;
}](https://image.slidesharecdn.com/googletangov2d-171120013501/85/Google-Tango-54-320.jpg)




Google Tango§« ¨FĆg ņĹÁ§Úł–§ł§∆§Ŗ§Ť§¶
- 3. Īĺ»’§őńŕ»› ? SLAM§»§Ō ? Visual SLAM§»§Ō ? •ř©`•ę©`•ž•ĻAR ? GoogleTango§»§Ō ?MotionTracking ?Area Learning ?Depth perception ?Visual Positioning Service
- 4. SLAM§»§Ō Simultaneous Localization And Mapping ? §‚§»§‚§»§Ō•Ū•‹•√•»∑÷“į Localization : őĽ÷√?◊ňĄ›Õ∆∂® Mapping : •ř•√•◊§őÕ∆∂® ‹á§ő◊‘Ą”Ŗ\‹ě°Ę•…•Ū©`•ů°Ę•Ū•‹•√•»íŖ≥żôC§ §…§«ņŻ”√§Ķ§ž§Ž°£3D•Ļ•≠•„• §»§∑§∆ņŻ”√§Ķ§ž §Ō§ł§Š§Ž°£ •Ķ •§ •‚ •∆ ©` •ň •Ę •Ļ
- 6. ĀżłŮ.≥¶ī«≥ĺ
- 7. »ģ
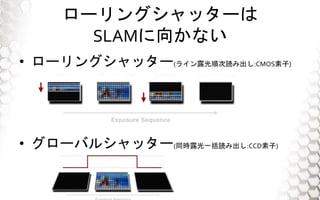
- 8. SLAM§őńŅ ? •ž©`•∂©`•ž•ů•ł•Ļ•≠•„• ©`(úy”Ú•Ľ•ů•Ķ) ? RGB•ę•Š•ť ? Depth(…Ó∂»)•ę•Š•ť ? Stereo(2—Ř)•ę•Š•ť •ž©`•∂©`•ž•ů•ł•Ļ•≠•„• ©`§Ō§»§∆§‚łŖĀż§ §ő§« •ę•Š•ť”≥Ō٧ڧ‚§»§ňÕ∆∂®§Ú––§¶°ĘVisual SLAM §¨•Ļ•ř•Ř§ §…§« Ļ§Ô§ž§Ž§Ť§¶§ň§ §√§∆§≠§Ņ°£
- 9. Visual SLAM§»§Ō ? •ę•Š•ť§őĽ≠Ō٧ڧ‚§»§ň¨FĆg ņĹÁ§őŐōŹ’§ÚņŻ”√ §∑§∆Ņ’ťg’J◊R§»°ĘőĽ÷√Õ∆∂®§Ú––§¶°£ ? £“£«£¬§őÖg—Ř•ę•Š•ť°Ę•Ļ•∆•ž•™•ę•Š•ť°Ę…Ó∂» •ę•Š•ť§ §…§«Ćg¨F§Ļ§Ž§Ņ§Šį≤Āż°£
- 10. Visual SLAM§»§Ō ? •’•ž©`•ŗťg§«§őŐōŹ’Ķ„§ÚĆ̏ͧҧĪ°ĘŐōŹ’ §Ú◊∑ŘE§∑°Ę≠hĺ≥Map§Ú◊ų≥… ≤őŅľ https://goo.gl/uFqQtk
- 11. Visual SLAM§ő•«•‚ ? Outdoor stereo SLAM with RTAB-Map •Ŗ•Ś•ů•ō•ůĻ§Ņ∆īů—ß•≥•ů•‘•Ś©`•Ņ•”•ł•Á•ů•į•Ž©`•◊ ? Real-TimeTrajectory Replanning for MAVs using Uniform B-splines and 3D Circular Buffer ? Autonomous Camera-Based Navigation of a Low-Cost Quadrocopter
- 12. Visual SLAM§ő»űĶ„ ? ŐōŹ’§őČš§Ô§Ž§‚§ő§ŌŅŗ ÷ ®C Ą”§Į§‚§ő ®C ∑ī…š§Ļ§Ž°ĘÕł√ų§ §‚§ő ? ŐōŹ’§ő§ §§§‚§ő§ŌŅŗ ÷ ®C üoĶō§őĪŕ ? Õ¨§łŐōŹ’§őēr§ŌÕ¨§ł§‚§ő§»§Ŗ§ §Ļ ®C ≤° “§Ŗ§Ņ§§§ §‚§ő§š°Ę•”•Ž§őŽA ż§őŖ`§§§ §…
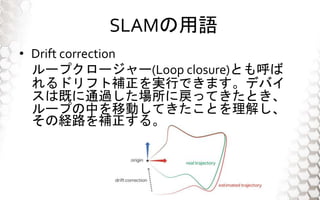
- 14. SLAM§ő”√’Z ? Drift correction •Ž©`•◊•Į•Ū©`•ł•„©`(Loop closure)§»§‚ļۧ– §ž§Ž•…•Í•’•»—a’ż§ÚĆg––§«§≠§ř§Ļ°£•«•–•§ •Ļ§Ōľ»§ňÕ®Ŗ^§∑§ŅąŲňý§ňĎݧ√§∆§≠§Ņ§»§≠°Ę •Ž©`•◊§ő÷–§Ú“∆Ą”§∑§∆§≠§Ņ§≥§»§ÚņŪĹ‚§∑°Ę §Ĺ§őĹU¬∑§Ú—a’ż§Ļ§Ž°£
- 15. •ř©`•ę©`•ž•ĻAR§¨Ńų––§Ž ? GoogleTango ? Google ARCore ? AppleARKit(iOS11) ? KudanAR ? GrapecityWikitude
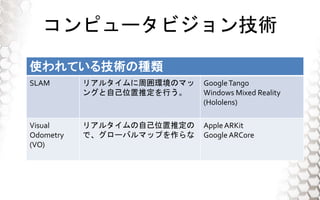
- 16. •≥•ů•‘•Ś©`•Ņ•”•ł•Á•ůľľ–g Ļ§Ô§ž§∆§§§Žľľ–g§ő∑NÓź SLAM •Í•Ę•Ž•Ņ•§•ŗ§ň÷‹áž≠hĺ≥§ő•ř•√ •ů•į§»◊‘ľļőĽ÷√Õ∆∂®§Ú––§¶°£ GoogleTango Windows Mixed Reality (Hololens) Visual Odometry (VO) •Í•Ę•Ž•Ņ•§•ŗ§ő◊‘ľļőĽ÷√Õ∆∂®§ő §«°Ę•į•Ū©`•–•Ž•ř•√•◊§Ú◊ų§ť§ AppleARKit Google ARCore
- 20. Visual Positioning Service MotionTracking°ĘArea Learning§ §…ĹM§ŖļŌ §Ô§Ľ°ĘĶōáŪ…Ō§ő§…§≥§ň◊‘∑÷§¨§§§Ž§ę§Úį—ő’ §«§≠§Ž°£
- 21. §»§Ō Tango ARCore ? MotionTracking °ū °ū ? Area Learning °ū ? Depth perception °ū °ū ? Visual Positioning Service °ū ? Light estimation °ū
- 22. Tango•«•–•§•Ļ ? Ćü”√•«•–•§•Ļ§¨2∑NįkČ”§Ķ§ž§∆§§§Ž°£ Depth•ę•Š•ť°ĘRGB•ę•Š•ť°ĘŰ~—Ř•ž•ů•ļ•ę •Š•ť§ÚīÓ›d
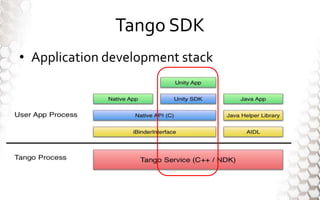
- 26. Tango SDK ? Application development stack
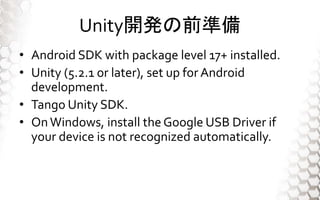
- 27. Unityť_įk§ő«įú āš ? Android SDK with package level 17+ installed. ? Unity (5.2.1 or later), set up for Android development. ? Tango Unity SDK. ? OnWindows, install the Google USB Driver if your device is not recognized automatically.
- 28. Unityť_įk§ő«įú āš ? Edit > Preference §őExternalTools§«Android SDK§»JDK§ő‘O∂®°£
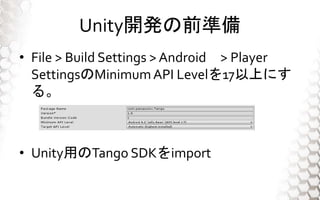
- 29. Unityť_įk§ő«įú āš ? File > Build Settings > Android > Player Settings§őMinimumAPI Level§Ú17“‘…Ō§ň§Ļ §Ž°£ ? Unity”√§őTango SDK§Úimport
- 30. MOTIONTRACKING
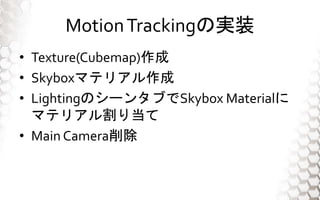
- 31. ≤—ī«≥ŔĺĪī«≤‘į’įý≤Ļ≥¶įžĺĪ≤‘≤Ķ§őĆg◊į ? Texture(Cubemap)◊ų≥… ? Skybox•ř•∆•Í•Ę•Ž◊ų≥… ? Lighting§ő•∑©`•ů•Ņ•÷§«Skybox Material§ň •ř•∆•Í•Ę•ŽłÓ§ÍĶĪ§∆ ? Main CameraŌų≥ż
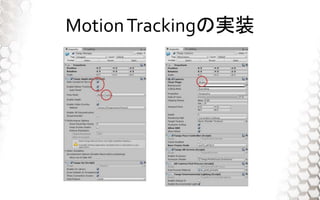
- 32. ≤—ī«≥ŔĺĪī«≤‘į’įý≤Ļ≥¶įžĺĪ≤‘≤Ķ§őĆg◊į ? Project•¶•£•ů•…•¶§őAssets >TangoPrefabs §ę§ťTango Manager§»TangoCamera§Ú•∑©` •ů§ň•…•Ū•√•◊ ? Tango Camera§ÚŖxík§∑°ĘInspector§őClear Flag§ÚSky Box§ňČšłŁ§Ļ§Ž°£ ? Build§∑§∆ÕÍ≥…
- 35. DEPTH PERCEPTION
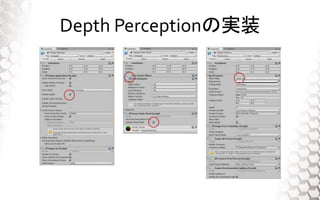
- 36. Depth Perception§őĆg◊į ? Project•¶•£•ů•…•¶§őAssets >TangoPrefabs §ę§ťTango Manager§»TangoCamera °Ę Tango Point Cloud§Ú•∑©`•ů§ň•…•Ū•√•◊ ? Tango Manager§ÚŖxík°ĘInspector§«Enable Depth§ň•Ń•ß•√•Į§Ú»Ž§ž§Ž°£
- 37. Depth Perception§őĆg◊į ? Tango Point Cloud§ÚŖxík§∑°ĘInspector§ő Mesh Renderer§»Update Points Mesh§ň •Ń•ß•√•Į§Ú»Ž§ž§Ž°£ ? Tango Camera§ÚŖxík§∑°ĘInspector§őClear Flag§ÚSolidColor§ňČšłŁ§Ļ§Ž°£ ? Build§∑§∆ÕÍ≥…
- 40. AREA LEARNING
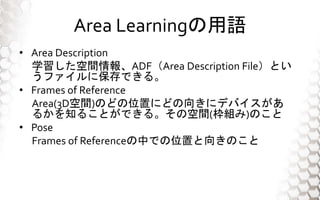
- 41. Area Learning§ő”√’Z ? Area Description —ßŃē§∑§ŅŅ’ťg«ťąů°ĘADF£®Area Description File£©§»§§ §¶•’•°•§•Ž§ňĪ£īś§«§≠§Ž°£ ? Frames of Reference Area(3DŅ’ťg)§ő§…§őőĽ÷√§ň§…§őŌÚ§≠§ň•«•–•§•Ļ§¨§Ę §Ž§ę§Ú÷™§Ž§≥§»§¨§«§≠§Ž°£§Ĺ§őŅ’ťg(ĖėĹM§Ŗ)§ő§≥§» ? Pose Frames of Reference§ő÷–§«§őőĽ÷√§»ŌÚ§≠§ő§≥§»
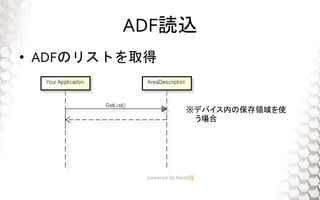
- 42. Area Learning§őĆg◊į ? ĶōáŪ§ő◊ų≥…ôCń‹ ®C ≥ű∆ŕĽĮ ®C •®•Í•Ę•ť©`•ň•ů•įť_ ľ ®C ADFĪ£īś ? ◊ų≥…§∑§ŅĶōáŪ…Ō§ň•ř©`•ę©`‘O÷√§»Ī£īś§Ļ §ŽôCń‹ ®C ≥ű∆ŕĽĮ ®C ADF’iřz ®C •®•Í•Ę•ť©`•ň•ů•įť_ ľ ®C •ř©`•ę©`‘O÷√
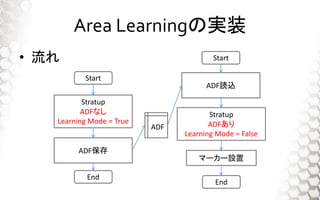
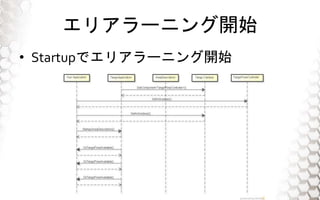
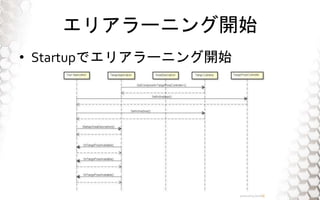
- 43. Area Learning§őĆg◊į ? Ńų§ž Start Stratup ADF§ §∑ Learning Mode = True ADFĪ£īś End Start Stratup ADF§Ę§Í Learning Mode = False ADF’iřz End •ř©`•ę©`‘O÷√ ADF
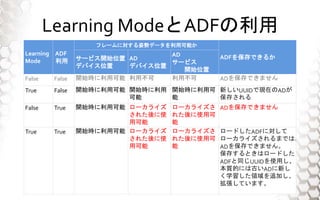
- 44. Learning Mode§»ADF§őņŻ”√ Learning Mode ADF ņŻ”√ •’•ž©`•ŗ§ňḈĻ§Ž◊ňĄ›•«©`•Ņ§ÚņŻ”√Ņ…ń‹§ę ADF§ÚĪ£īś§«§≠§Ž§ę•Ķ©`•”•Ļť_ ľőĽ÷√ •«•–•§•ĻőĽ÷√ AD •«•–•§•ĻőĽ÷√ AD •Ķ©`•”•Ļ ť_ ľőĽ÷√ False False ť_ ľēr§ňņŻ”√Ņ…ń‹ ņŻ”√≤ĽŅ… ņŻ”√≤ĽŅ… AD§ÚĪ£īś§«§≠§ř§Ľ§ů True False ť_ ľēr§ňņŻ”√Ņ…ń‹ ť_ ľēr§ňņŻ”√ Ņ…ń‹ ť_ ľēr§ňņŻ”√Ņ… ń‹ –¬§∑§§UUID§«¨F‘ŕ§őAD§¨ Ī£īś§Ķ§ž§Ž False True ť_ ľēr§ňņŻ”√Ņ…ń‹ •Ū©`•ę•ť•§•ļ §Ķ§ž§ŅŠŠ§ň Ļ ”√Ņ…ń‹ •Ū©`•ę•ť•§•ļ§Ķ §ž§ŅŠŠ§ň Ļ”√Ņ… ń‹ AD§ÚĪ£īś§«§≠§ř§Ľ§ů True True ť_ ľēr§ňņŻ”√Ņ…ń‹ •Ū©`•ę•ť•§•ļ §Ķ§ž§ŅŠŠ§ň Ļ ”√Ņ…ń‹ •Ū©`•ę•ť•§•ļ§Ķ §ž§ŅŠŠ§ň Ļ”√Ņ… ń‹ •Ū©`•…§∑§ŅADF§ňḈ∑§∆ •Ū©`•ę•ť•§•ļ§Ķ§ž§Ž§ř§«§Ō°Ę AD§ÚĪ£īś§«§≠§ř§Ľ§ů°£ Ī£īś§Ļ§Ž§»§≠§Ō•Ū©`•…§∑§Ņ ADF§»Õ¨§łUUID§Ú Ļ”√§∑°Ę ĪĺŔ|Ķń§ň§ŌĻҧ§AD§ň–¬§∑ §Į—ßŃē§∑§ŅÓI”Ú§Ú◊∑ľ”§∑°Ę íąŹą§∑§∆§§§ř§Ļ°£
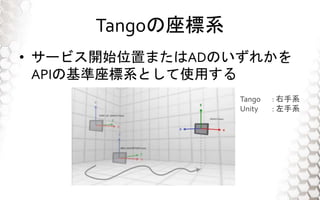
- 45. Tango§ő◊ýėňŌĶ ? •Ķ©`•”•Ļť_ ľőĽ÷√§ř§Ņ§ŌAD§ő§§§ļ§ž§ę§Ú API§őĽýú ◊ýėňŌĶ§»§∑§∆ Ļ”√§Ļ§Ž Tango : ”“ ÷ŌĶ Unity : ◊ů ÷ŌĶ
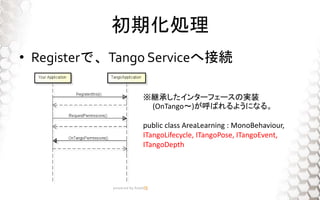
- 46. ≥ű∆ŕĽĮĄIņŪ ? Register§«°ĘTango Service§ōĹ”ĺA °ýĺ@≥–§∑§Ņ•§•ů•Ņ©`•’•ß©`•Ļ§őĆg◊į (OnTango°ę)§¨ļۧ–§ž§Ž§Ť§¶§ň§ §Ž°£ public class AreaLearning : MonoBehaviour, ITangoLifecycle, ITangoPose, ITangoEvent, ITangoDepth
- 47. ≥ű∆ŕĽĮĄIņŪ public void Start() { m_poseController = FindObjectOfType<TangoPoseController>(); m_tangoApplication = FindObjectOfType<TangoApplication>(); if (m_tangoApplication != null) { m_tangoApplication.Register(this); if (AndroidHelper.IsTangoCorePresent()) { m_tangoApplication.RequestPermissions(); } } else { DebugPrint("No Tango Manager found in scene."); } }
- 49. •®•Í•Ę•ť©`•ň•ů•įť_ ľ public void StartAreaLearning(bool isNewAreaDescription) { m_isLearning = isNewAreaDescription; if (m_isLearning) { m_currentAreaDescription = null; m_tangoApplication.m_areaDescriptionLearningMode = true; } else { m_currentAreaDescription = FindAreaDescription(); if (m_currentAreaDescription == null) { DebugPrint("not found AD."); return; } m_tangoApplication.m_areaDescriptionLearningMode = false; } m_poseController = m_tangoCamera.GetComponent<TangoPoseController>(); m_poseController.gameObject.SetActive(true); m_tangoCamera.SetActive(true); // Relocalization÷–§őImageĪŪ ĺ”√ m_relocalization.SetActive(true); m_tangoApplication.Startup(m_currentAreaDescription); }
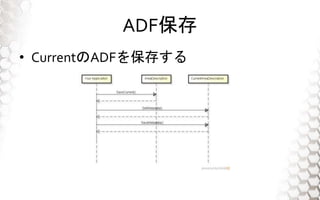
- 51. ADFĪ£īś if (m_tangoApplication.m_areaDescriptionLearningMode) { m_saveThread = new Thread(delegate () { // ADFŌų≥ż AreaDescription oldAreaDescription = FindAreaDescription(); // ADFĪ£īś m_currentAreaDescription = AreaDescription.SaveCurrent(); AreaDescription.Metadata metadata = m_currentAreaDescription.GetMetadata(); if (m_currentAreaDescription != null) { metadata.m_name = FILE_NAME; m_currentAreaDescription.SaveMetadata(metadata); DebugPrint("New ADF ID = " + m_currentAreaDescription.m_uuid, true); if (oldAreaDescription != null) { oldAreaDescription.Delete(); } } else { DebugPrint("ADF not found", true); } }); m_saveThread.Start(); }
- 54. ADF’iřz private AreaDescription FindAreaDescription() { //DebugPrint("PopulateList start", false); AreaDescription[] list = AreaDescription.GetList(); AreaDescription foundADF = null; //DebugPrint("Length = " + list.Length, false); if (list != null && list.Length > 0) { foreach (AreaDescription areaDescription in list) { AreaDescription.Metadata metadata = areaDescription.GetMetadata(); if (metadata.m_name == FILE_NAME) { foundADF = areaDescription; //DebugPrint("found uuid = " + foundADF.m_uuid, false); break; } } } if (foundADF == null) { //DebugPrint("No area descriptions available.", false); } return foundADF; }
- 56. •®•Í•Ę•ť©`•ň•ů•įť_ ľ public void StartAreaLearning(bool isNewAreaDescription) { m_isLearning = isNewAreaDescription; if (m_isLearning) { m_currentAreaDescription = null; m_tangoApplication.m_areaDescriptionLearningMode = true; } else { m_currentAreaDescription = FindAreaDescription(); if (m_currentAreaDescription == null) { DebugPrint("not found AD."); return; } m_tangoApplication.m_areaDescriptionLearningMode = false; } m_poseController = m_tangoCamera.GetComponent<TangoPoseController>(); m_poseController.gameObject.SetActive(true); m_tangoCamera.SetActive(true); // Relocalization÷–§őImageĪŪ ĺ”√ m_relocalization.SetActive(true); m_tangoApplication.Startup(m_currentAreaDescription); }
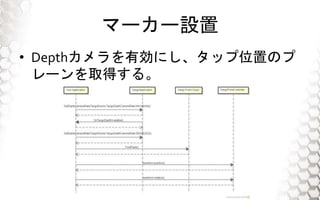
- 58. •ř©`•ę©`‘O÷√ m_findPlaneWaitingForDepth = true; // Depth•ę•Š•ť§Ú”–ĄŅ§ň§Ļ§Ž m_tangoApplication.SetDepthCameraRate(TangoEnums.TangoDepthCameraRate.MAXIMUM); while (m_findPlaneWaitingForDepth) { yield return null; } m_tangoApplication.SetDepthCameraRate(TangoEnums.TangoDepthCameraRate.DISABLED); // ∆Ĺ√ś§Ú“ä§ń§Ī§Ž Camera cam = Camera.main; Vector3 planeCenter; Plane plane; if (!m_pointCloud.FindPlane(cam, touchPosition, out planeCenter, out plane)) { yield break; } // ∑®ĺÄ•Ŕ•Į•»•Ž Vector3 up = plane.normal;
- 59. Area Learning•«•‚ ? Area Learning§∑§Ņ«ťąů§»ĆgŽH§őőÔ§őąŲňý§ő «ťąů§Úľ~§Ň§Ī§Ž°£ ľ“ŽäAR + NLP(őń√}ņŪĹ‚)
- 62. Visual Positioning Service ? Indoor Retail Mapping Leader aisle411 Delivers In-Store 3D Mapping on Google's ProjectTango
- 63. VPS§«§š§ž§Ž§≥§» ? «ťąů§őŐŠĻ© ®C ĻŐ∂®§ő«ťąů§ÚŇš–Ň ? ąŲňý§Ú÷™§ť§Ľ§Ž ? őÔ§ő«ťąů§Ú÷™§ť§Ľ§Ž ®C §§§ř°Ę§Ĺ§őąŲňý§ň§§§Ž»ň§ň«ťąů§ÚŇš–Ň ? éŕłś ? •Í•≥•Š•ů•… ? ņŻ”√’Ŗ§őąŲňý§Ú•Í•Ę•Ž•Ņ•§•ŗį—ő’
- 64. VPS§«Īō“™§»§ §Ž§≥§» ? “∆Ą”§ň§Ť§ŽADF§ő«–§ÍŐś§®£®Õ¨§łėč‘ž§őĹ® őÔ(ŽA ż)§őŖ`§§§ §…§Ú¬Ů§Š§Ž§≥§»§‚£© ®C ÷Ī«į§őGPS«ťąů ®C Wifi°ĘBeacon°ĘLinkRay ®C ADF§ő•ř©`•ł ? ≠hĺ≥ČšĽĮ§ň§Ť§ŽADF§őłŁ–¬ ®C •ś©`•∂©` ®C •Ķ©`•”•Ļ ¬ėI’Ŗ
- 65. VPS§ň§™“ŘŃĘ§Ń ? ADF§őŐŠĻ©•Ķ©`•”•Ļ§ÚŇ£∂ķ§Ž ? ADF§őĺéľĮ•Ķ©`•”•Ļ§‚§∑§Į§Ō•ń©`•Ž§őŐŠĻ© ®C ĶÍŇnńŕ§őŇԳӧͧ»§őŖBĄ” •Ķ©`•”•Ļ§Ú◊ų§Ž§ő§ŌāÄ°©§ň»ő§Ľ°ĘÕŃŐ®§»ń©∂ň§ §…§« Ļ§®§Ž§‚§ő§ÚŐŠĻ©§∑§∆§§§Į§≥§»§¨∆’ľį§ň§ń § §¨§Ž°£§™Ĺū§őĄŲ§§§¨§∑§ř§Ļ°£
- 66. §Ĺ§∑§∆ĹŁ§§Ĺęņī°≠