








–†–Ψ–±–Ψ―²–Ψ―²–Β―Ö–Ϋ―•–Κ–Α –·–Ω–Ψ–Ϋ―•―½
- 1. –Ü–Γ–Δ–û–†–Ü–· –†–û–ë–û–Δ–û–Δ–ï–Ξ–ù–Ü–ö–‰. –†–û–ë–û–Δ–û–Δ–ï–Ξ–ù–Ü–ö–ê –£ –·–ü–û–ù–Ü–΅. –ö–Ψ–Φ―É–Ϋ–Α–Μ―¨–Ϋ–Η–Ι –≤–Η―â–Η–Ι –Ϋ–Α–≤―΅–Α–Μ―¨–Ϋ–Η–Ι –Ζ–Α–Κ–Μ–Α–¥ ¬Ϊ–ë–Β―Ä–Η―¹–Μ–Α–≤―¹―¨–Κ–Η–Ι –Ω–Β–¥–Α–≥–Ψ–≥―•―΅–Ϋ–Η–Ι –Κ–Ψ–Μ–Β–¥–Ε ―•–Φ–Β–Ϋ―• –£.–Λ. –ë–Β–Ϋ―¨–Κ–Ψ–≤―¹―¨–Κ–Ψ–≥–Ψ¬Μ –Ξ–Β―Ä―¹–Ψ–Ϋ―¹―¨–Κ–Ψ―½ –Ψ–±–Μ–Α―¹–Ϋ–Ψ―½ ―Ä–Α–¥–Η 2017 ―Ä―•–Κ
- 2. –†–Ψ–±–Ψ―²–Ψ―²–ΒΧ¹―Ö–Ϋ―•–Κ–ΑβÄî –Ω―Ä–Η–Κ–Μ–Α–¥–Ϋ–Α –Ϋ–Α―É–Κ–Α, ―â–Ψ –Ψ–Ω―•–Κ―É―î―²―¨―¹―è –Ω―Ä–Ψ–Β–Κ―²―É–≤–Α–Ϋ–Ϋ―è–Φ, ―Ä–Ψ–Ζ―Ä–Ψ–±–Κ–Ψ―é, –±―É–¥―•–≤–Ϋ–Η―Ü―²–≤–Ψ–Φ, –Β–Κ―¹–Ω–Μ―É–Α―²–Α―Ü―•―î―é ―²–Α –≤–Η–Κ–Ψ―Ä–Η―¹―²–Α–Ϋ–Ϋ―è–Φ ―Ä–Ψ–±–Ψ―²―•–≤, –Α ―²–Α–Κ–Ψ–Ε –Κ–Ψ–Φ–Ω'―é―²–Β―Ä–Ϋ–Η―Ö ―¹–Η―¹―²–Β–Φ –¥–Μ―è ―½―Ö –Κ–Ψ–Ϋ―²―Ä–Ψ–Μ―é, ―¹–Β–Ϋ―¹–Ψ―Ä–Ϋ–Ψ–≥–Ψ (–Ϋ–Α –Ψ―¹–Ϋ–Ψ–≤―• –≤–Η―Ö―•–¥–Ϋ–Η―Ö ―¹–Η–≥–Ϋ–Α–Μ―•–≤ –¥–Α–≤–Α―΅―•–≤) –Ζ–≤–Ψ―Ä–Ψ―²–Ϋ–Ψ–≥–Ψ –Ζ–≤'―è–Ζ–Κ―É ―• –Ψ–±―Ä–Ψ–±–Κ–Η ―•–Ϋ―³–Ψ―Ä–Φ–Α―Ü―•―½ –Α–≤―²–Ψ–Φ–Α―²–Η–Ζ–Ψ–≤–Α–Ϋ–Η―Ö ―²–Β―Ö–Ϋ―•―΅–Ϋ–Η―Ö ―¹–Η―¹―²–Β–Φ (―Ä–Ψ–±–Ψ―²―•–≤).
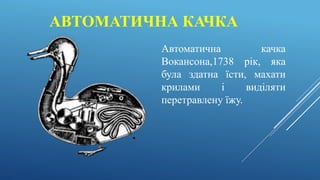
- 4. –ê–£–Δ–û–€–ê–Δ–‰–ß–ù–ê –ö–ê–ß–ö–ê –ê–≤―²–Ψ–Φ–Α―²–Η―΅–Ϋ–Α –Κ–Α―΅–Κ–Α –£–Ψ–Κ–Α–Ϋ―¹–Ψ–Ϋ–Α,1738 ―Ä―•–Κ, ―è–Κ–Α –±―É–Μ–Α –Ζ–¥–Α―²–Ϋ–Α ―½―¹―²–Η, –Φ–Α―Ö–Α―²–Η –Κ―Ä–Η–Μ–Α–Φ–Η ―• –≤–Η–¥―•–Μ―è―²–Η –Ω–Β―Ä–Β―²―Ä–Α–≤–Μ–Β–Ϋ―É ―½–Ε―É.
- 6. –†–û–ë–û–Δ –½ –Π–‰–Λ–†–û–£–‰–€ –ö–ï–†–Θ–£–ê–ù–ù–·–€ UNIMATE –¥–Μ―è –Ω―•–¥–Ϋ―è―²―²―è –≥–Α―Ä―è―΅–Η―Ö ―à–Φ–Α―²–Κ―•–≤ –Φ–Β―²–Α–Μ―É –Ζ –Φ–Α―à–Η–Ϋ–Η –¥–Μ―è –Μ–Η―²―²―è –Ω―•–¥ ―²–Η―¹–Κ–Ψ–Φ, ―• ―¹–Κ–Μ–Α–¥–Α–Ϋ–Ϋ―è ―½―Ö.
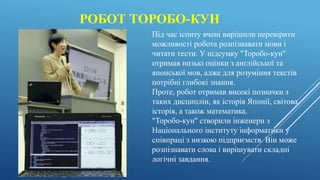
- 9. –†–û–ë–û–Δ –Δ–û–†–û–ë–û-–ö–Θ–ù –ü―•–¥ ―΅–Α―¹ ―•―¹–Ω–Η―²―É –≤―΅–Β–Ϋ―• –≤–Η―Ä―•―à–Η–Μ–Η –Ω–Β―Ä–Β–≤―•―Ä–Η―²–Η –Φ–Ψ–Ε–Μ–Η–≤–Ψ―¹―²―• ―Ä–Ψ–±–Ψ―²–Α ―Ä–Ψ–Ζ–Ω―•–Ζ–Ϋ–Α–≤–Α―²–Η –Φ–Ψ–≤–Η ―• ―΅–Η―²–Α―²–Η ―²–Β―¹―²–Η. –Θ –Ω―•–¥―¹―É–Φ–Κ―É "–Δ–Ψ―Ä–Ψ–±–Ψ-–Κ―É–Ϋ" –Ψ―²―Ä–Η–Φ–Α–≤ –Ϋ–Η–Ζ―¨–Κ―• –Ψ―Ü―•–Ϋ–Κ–Η –Ζ –Α–Ϋ–≥–Μ―•–Ι―¹―¨–Κ–Ψ―½ ―²–Α ―è–Ω–Ψ–Ϋ―¹―¨–Κ–Ψ―½ –Φ–Ψ–≤, –Α–¥–Ε–Β –¥–Μ―è ―Ä–Ψ–Ζ―É–Φ―•–Ϋ–Ϋ―è ―²–Β–Κ―¹―²―•–≤ –Ω–Ψ―²―Ä―•–±–Ϋ―• –≥–Μ–Η–±–Ψ–Κ―• –Ζ–Ϋ–Α–Ϋ–Ϋ―è. –ü―Ä–Ψ―²–Β, ―Ä–Ψ–±–Ψ―² –Ψ―²―Ä–Η–Φ–Α–≤ –≤–Η―¹–Ψ–Κ―• –Ω–Ψ–Ζ–Ϋ–Α―΅–Κ–Η –Ζ ―²–Α–Κ–Η―Ö –¥–Η―¹―Ü–Η–Ω–Μ―•–Ϋ, ―è–Κ ―•―¹―²–Ψ―Ä―•―è –·–Ω–Ψ–Ϋ―•―½, ―¹–≤―•―²–Ψ–≤–Α ―•―¹―²–Ψ―Ä―•―è, –Α ―²–Α–Κ–Ψ–Ε –Φ–Α―²–Β–Φ–Α―²–Η–Κ–Α. "–Δ–Ψ―Ä–Ψ–±–Ψ-–Κ―É–Ϋ" ―¹―²–≤–Ψ―Ä–Η–Μ–Η ―•–Ϋ–Ε–Β–Ϋ–Β―Ä–Η –Ζ –ù–Α―Ü―•–Ψ–Ϋ–Α–Μ―¨–Ϋ–Ψ–≥–Ψ ―•–Ϋ―¹―²–Η―²―É―²―É ―•–Ϋ―³–Ψ―Ä–Φ–Α―²–Η–Κ–Η ―É ―¹–Ω―•–≤–Ω―Ä–Α―Ü―• –Ζ –Ϋ–Η–Ζ–Κ–Ψ―é –Ω―•–¥–Ω―Ä–Η―î–Φ―¹―²–≤. –£―•–Ϋ –Φ–Ψ–Ε–Β ―Ä–Ψ–Ζ–Ω―•–Ζ–Ϋ–Α–≤–Α―²–Η ―¹–Μ–Ψ–≤–Α ―• –≤–Η―Ä―•―à―É–≤–Α―²–Η ―¹–Κ–Μ–Α–¥–Ϋ―• –Μ–Ψ–≥―•―΅–Ϋ―• –Ζ–Α–≤–¥–Α–Ϋ–Ϋ―è.
- 10. 3 –½–ê–ö–û–ù–‰ –†–û–ë–û–Δ–û–Δ–ï–Ξ–ù–Ü–ö–‰: 1. –†–Ψ–±–Ψ―² –Ϋ–Β –Ω–Ψ–≤–Η–Ϋ–Β–Ϋ –Ζ–Α–≤–¥–Α–≤–Α―²–Η ―à–Κ–Ψ–¥–Η –Μ―é–¥―è–Φ –Α–±–Ψ –Ϋ–Β –¥―•―è―²–Η, –¥–Ψ–Ω―É―¹–Κ–Α―é―΅–Η, ―â–Ψ–± –Μ―é–¥–Η –Ω–Ψ―¹―²―Ä–Α–Ε–¥–Α–Μ–Η. 2. –†–Ψ–±–Ψ―² –Ζ–Ψ–±–Ψ–≤'―è–Ζ–Α–Ϋ–Η–Ι –Ω―•–¥–Κ–Ψ―Ä―è―²–Η―¹―è –Ϋ–Α–Κ–Α–Ζ–Α–Φ –Μ―é–¥–Β–Ι –Ζ–Α –≤–Η–Ϋ―è―²–Κ–Ψ–Φ –≤–Η–Ω–Α–¥–Κ―•–≤, –Κ–Ψ–Μ–Η ―Ü―• –Ϋ–Α–Κ–Α–Ζ–Η ―¹―É–Ω–Β―Ä–Β―΅–Α―²―¨ –Ω–Ψ–Μ–Ψ–Ε–Β–Ϋ–Ϋ―è–Φ –Ω–Β―Ä―à–Ψ–≥–Ψ –Ζ–Α–Κ–Ψ–Ϋ―É. 3. –†–Ψ–±–Ψ―² –Ω–Ψ–≤–Η–Ϋ–Β–Ϋ –Ζ–Α―Ö–Η―â–Α―²–Η ―¹–Β–±–Β –≤―•–¥ –Ζ–Α–≥–Η–±–Β–Μ―•, ―è–Κ―â–Ψ –¥―•―½, –Ω–Ψ–≤'―è–Ζ–Α–Ϋ―• –Ζ ―²–Α–Κ–Ψ―é –Ζ–Α―Ö–Η―¹―²–Ψ–Φ, –Ϋ–Β ―¹―É–Ω–Β―Ä–Β―΅–Α―²―¨ –Ω–Ψ–Μ–Ψ–Ε–Β–Ϋ–Ϋ―è–Φ –Ω–Β―Ä―à–Ψ–≥–Ψ –Α–±–Ψ –¥―Ä―É–≥–Ψ–≥–Ψ –Ζ–Α–Κ–Ψ–Ϋ―•–≤.
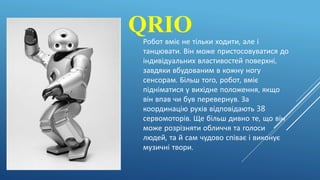
- 11. QRIO–†–Ψ–±–Ψ―² –≤–Φ―•―î –Ϋ–Β ―²―•–Μ―¨–Κ–Η ―Ö–Ψ–¥–Η―²–Η, –Α–Μ–Β ―• ―²–Α–Ϋ―Ü―é–≤–Α―²–Η. –£―•–Ϋ –Φ–Ψ–Ε–Β –Ω―Ä–Η―¹―²–Ψ―¹–Ψ–≤―É–≤–Α―²–Η―¹―è –¥–Ψ ―•–Ϋ–¥–Η–≤―•–¥―É–Α–Μ―¨–Ϋ–Η―Ö –≤–Μ–Α―¹―²–Η–≤–Ψ―¹―²–Β–Ι –Ω–Ψ–≤–Β―Ä―Ö–Ϋ―•, –Ζ–Α–≤–¥―è–Κ–Η –≤–±―É–¥–Ψ–≤–Α–Ϋ–Η–Φ –≤ –Κ–Ψ–Ε–Ϋ―É –Ϋ–Ψ–≥―É ―¹–Β–Ϋ―¹–Ψ―Ä–Α–Φ. –ë―•–Μ―¨―à ―²–Ψ–≥–Ψ, ―Ä–Ψ–±–Ψ―², –≤–Φ―•―î –Ω―•–¥–Ϋ―•–Φ–Α―²–Η―¹―è ―É –≤–Η―Ö―•–¥–Ϋ–Β –Ω–Ψ–Μ–Ψ–Ε–Β–Ϋ–Ϋ―è, ―è–Κ―â–Ψ –≤―•–Ϋ –≤–Ω–Α–≤ ―΅–Η –±―É–≤ –Ω–Β―Ä–Β–≤–Β―Ä–Ϋ―É–≤. –½–Α –Κ–Ψ–Ψ―Ä–¥–Η–Ϋ–Α―Ü―•―é ―Ä―É―Ö―•–≤ –≤―•–¥–Ω–Ψ–≤―•–¥–Α―é―²―¨ 38 ―¹–Β―Ä–≤–Ψ–Φ–Ψ―²–Ψ―Ä―•–≤. –©–Β –±―•–Μ―¨―à –¥–Η–≤–Ϋ–Ψ ―²–Β, ―â–Ψ –≤―•–Ϋ –Φ–Ψ–Ε–Β ―Ä–Ψ–Ζ―Ä―•–Ζ–Ϋ―è―²–Η –Ψ–±–Μ–Η―΅―΅―è ―²–Α –≥–Ψ–Μ–Ψ―¹–Η –Μ―é–¥–Β–Ι, ―²–Α –Ι ―¹–Α–Φ ―΅―É–¥–Ψ–≤–Ψ ―¹–Ω―•–≤–Α―î ―• –≤–Η–Κ–Ψ–Ϋ―É―î –Φ―É–Ζ–Η―΅–Ϋ―• ―²–≤–Ψ―Ä–Η.
- 12. AIBO ―¹–Ψ–±–Α–Κ–Α-―Ä–Ψ–±–Ψ―², ―Ä–Ψ–Ζ―Ä–Ψ–±–Μ–Β–Ϋ–Α –Κ–Ψ–Φ–Ω–Α–Ϋ―•―î―é Sony. –£–Ψ–Ϋ–Α –Φ–Α―î –±–Β–Ζ–Μ―•―΅ –Φ–Ψ–¥–Η―³―•–Κ–Α―Ü―•–Ι, –Ω–Β―Ä―à–Α –Φ–Ψ–¥–Β–Μ―¨ –±―É–Μ–Α –≤–Η–Ω―É―â–Β–Ϋ–Α –≤ 1999 ―Ä–Ψ―Ü―•. AIBO –≤–Φ―•―î ―Ö–Ψ–¥–Η―²–Η, –±–Α―΅–Η―²–Η –Ϋ–Α–≤–Κ–Ψ–Μ–Η―à–Ϋ―• –Ω―Ä–Β–¥–Φ–Β―²–Η –Ζ–Α –¥–Ψ–Ω–Ψ–Φ–Ψ–≥–Ψ―é –≤―•–¥–Β–Ψ–Κ–Α–Φ–Β―Ä–Η ―• ―•–Ϋ―³―Ä–Α―΅–Β―Ä–≤–Ψ–Ϋ–Η―Ö –¥–Α―²―΅–Η–Κ―•–≤ –≤―•–¥―¹―²–Α–Ϋ―•, ―Ä–Ψ–Ζ–Ω―•–Ζ–Ϋ–Α–≤–Α―²–Η –Κ–Ψ–Φ–Α–Ϋ–¥–Η ―• –Ψ―¹–Ψ–±–Η. –†–Ψ–±–Ψ―² ―î –Ω–Ψ–≤–Ϋ―•―¹―²―é –Α–≤―²–Ψ–Ϋ–Ψ–Φ–Ϋ–Η–Φ: –≤―•–Ϋ –Φ–Ψ–Ε–Β –≤―΅–Η―²–Η―¹―è ―• ―Ä–Ψ–Ζ–≤–Η–≤–Α―²–Η―¹―è, ―¹–Ω–Η―Ä–Α―é―΅–Η―¹―¨ –Ϋ–Α ―¹–Ω–Ψ–Ϋ―É–Κ–Α–Ϋ–Ϋ―è ―¹–≤–Ψ–≥–Ψ –≥–Ψ―¹–Ω–Ψ–¥–Α―Ä―è, –Ψ–±―¹―²–Α–Ϋ–Ψ–≤–Κ–Η, –Α–±–Ψ ―•–Ϋ―à–Ψ–≥–Ψ AIBO
- 13. ACM-R5 –†–Ψ–±–Ψ―² –Φ–Ψ–Ε–Β –Ω–Β―Ä–Β―¹―É–≤–Α―²–Η―¹―è ―è–Κ –Ω–Ψ ―¹―É―à―•, ―²–Α–Κ ―• ―É –≤–Ψ–¥―•. –ö–Ψ–Ε–Ϋ–Α –Μ–Α–Ϋ–Κ–Α ―Ä–Ψ–±–Ψ―²–Α –≤–Ψ–Μ–Ψ–¥―•―î –¥–≤–Ψ–Φ–Α ―¹―²―É–Ω–Β–Ϋ―è–Φ–Η ―¹–≤–Ψ–±–Ψ–¥–Η. –Θ –Κ–Ψ–Ε–Ϋ–Ψ–Φ―É –Ζ –Φ–Ψ–¥―É–Μ―•–≤ –≤–±―É–¥–Ψ–≤–Α–Ϋ–Η–Ι –≤–Μ–Α―¹–Ϋ–Η–Ι –Α–Κ―É–Φ―É–Μ―è―²–Ψ―Ä, –Α –≤ –±–Α―²–Α―Ä–Β―½ –≤–Ψ–Ϋ–Η –Ζ–¥–Α―²–Ϋ―• –Ζ–Α–±–Β–Ζ–Ω–Β―΅―É–≤–Α―²–Η ACM-R5H –Β–Ϋ–Β―Ä–≥―•―î―é –Ϋ–Α 1,5 –≥–Ψ–¥–Η–Ϋ–Η ―Ä–Ψ–±–Ψ―²–Η.
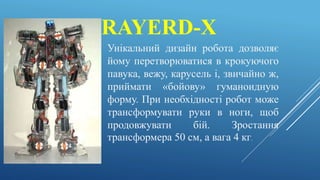
- 14. RAYERD-X –Θ–Ϋ―•–Κ–Α–Μ―¨–Ϋ–Η–Ι –¥–Η–Ζ–Α–Ι–Ϋ ―Ä–Ψ–±–Ψ―²–Α –¥–Ψ–Ζ–≤–Ψ–Μ―è―î –Ι–Ψ–Φ―É –Ω–Β―Ä–Β―²–≤–Ψ―Ä―é–≤–Α―²–Η―¹―è –≤ –Κ―Ä–Ψ–Κ―É―é―΅–Ψ–≥–Ψ –Ω–Α–≤―É–Κ–Α, –≤–Β–Ε―É, –Κ–Α―Ä―É―¹–Β–Μ―¨ ―•, –Ζ–≤–Η―΅–Α–Ι–Ϋ–Ψ –Ε, –Ω―Ä–Η–Ι–Φ–Α―²–Η ¬Ϊ–±–Ψ–Ι–Ψ–≤―É¬Μ –≥―É–Φ–Α–Ϋ–Ψ–Η–¥–Ϋ―É―é ―³–Ψ―Ä–Φ―É. –ü―Ä–Η –Ϋ–Β–Ψ–±―Ö―•–¥–Ϋ–Ψ―¹―²―• ―Ä–Ψ–±–Ψ―² –Φ–Ψ–Ε–Β ―²―Ä–Α–Ϋ―¹―³–Ψ―Ä–Φ―É–≤–Α―²–Η ―Ä―É–Κ–Η –≤ –Ϋ–Ψ–≥–Η, ―â–Ψ–± –Ω―Ä–Ψ–¥–Ψ–≤–Ε―É–≤–Α―²–Η –±―•–Ι. –½―Ä–Ψ―¹―²–Α–Ϋ–Ϋ―è ―²―Ä–Α–Ϋ―¹―³–Ψ―Ä–Φ–Β―Ä–Α 50 ―¹–Φ, –Α –≤–Α–≥–Α 4 –Κ–≥.
- 15. CHOROMET –†–Ψ–±–Ψ―² –≤–Φ―•―î –Μ―è–≥–Α―²–Η ―• –≤―¹―²–Α–≤–Α―²–Η, –Α ―²–Α–Κ–Ψ–Ε –≤–Η–Κ–Ψ–Ϋ―É–≤–Α―²–Η –¥―Ä―•–±–Ϋ―• –¥–Ψ―Ä―É―΅–Β–Ϋ–Ϋ―è. –ü―Ä–Α―Ü―é―î –Φ–Α―à–Η–Ϋ–Α –Ω―•–¥ ―É–Ω―Ä–Α–≤–Μ―•–Ϋ–Ϋ―è–Φ –Ψ–Ω–Β―Ä–Α―Ü―•–Ι–Ϋ–Ψ―½ ―¹–Η―¹―²–Β–Φ–Η Linux ―• 240-–€–™―Ü –Ω―Ä–Ψ―Ü–Β―¹–Ψ―Ä–Α SH-4. –½―Ä–Ψ―¹―²–Α–Ϋ–Ϋ―è Choromet ―¹–Κ–Μ–Α–¥–Α―î –≤―¹―¨–Ψ–≥–Ψ 35 ―¹–Φ, –Ω–Ψ–Ω–Β―Ä–Β–¥–Ϋ–Η–Κ –±―É–≤ –Κ―É–¥–Η –±―•–Μ―¨―à–Β βÄ™ 154 ―¹–Φ
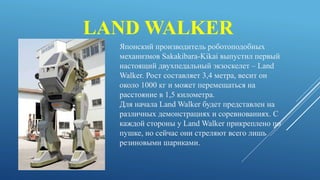
- 16. LAND WALKER –·–Ω–Ψ–Ϋ―¹–Κ–Η–Ι –Ω―Ä–Ψ–Η–Ζ–≤–Ψ–¥–Η―²–Β–Μ―¨ ―Ä–Ψ–±–Ψ―²–Ψ–Ω–Ψ–¥–Ψ–±–Ϋ―΄―Ö –Φ–Β―Ö–Α–Ϋ–Η–Ζ–Φ–Ψ–≤ Sakakibara-Kikai –≤―΄–Ω―É―¹―²–Η–Μ –Ω–Β―Ä–≤―΄–Ι –Ϋ–Α―¹―²–Ψ―è―â–Η–Ι –¥–≤―É―Ö–Ω–Β–¥–Α–Μ―¨–Ϋ―΄–Ι ―ç–Κ–Ζ–Ψ―¹–Κ–Β–Μ–Β―² βÄ™ Land Walker. –†–Ψ―¹―² ―¹–Ψ―¹―²–Α–≤–Μ―è–Β―² 3,4 –Φ–Β―²―Ä–Α, –≤–Β―¹–Η―² –Ψ–Ϋ –Ψ–Κ–Ψ–Μ–Ψ 1000 –Κ–≥ –Η –Φ–Ψ–Ε–Β―² –Ω–Β―Ä–Β–Φ–Β―â–Α―²―¨―¹―è –Ϋ–Α ―Ä–Α―¹―¹―²–Ψ―è–Ϋ–Η–Β –≤ 1,5 –Κ–Η–Μ–Ψ–Φ–Β―²―Ä–Α. –î–Μ―è –Ϋ–Α―΅–Α–Μ–Α Land Walker –±―É–¥–Β―² –Ω―Ä–Β–¥―¹―²–Α–≤–Μ–Β–Ϋ –Ϋ–Α ―Ä–Α–Ζ–Μ–Η―΅–Ϋ―΄―Ö –¥–Β–Φ–Ψ–Ϋ―¹―²―Ä–Α―Ü–Η―è―Ö –Η ―¹–Ψ―Ä–Β–≤–Ϋ–Ψ–≤–Α–Ϋ–Η―è―Ö. –Γ –Κ–Α–Ε–¥–Ψ–Ι ―¹―²–Ψ―Ä–Ψ–Ϋ―΄ ―É Land Walker –Ω―Ä–Η–Κ―Ä–Β–Ω–Μ–Β–Ϋ–Ψ –Ω–Ψ –Ω―É―à–Κ–Β, –Ϋ–Ψ ―¹–Β–Ι―΅–Α―¹ –Ψ–Ϋ–Η ―¹―²―Ä–Β–Μ―è―é―² –≤―¹–Β–≥–Ψ –Μ–Η―à―¨ ―Ä–Β–Ζ–Η–Ϋ–Ψ–≤―΄–Φ–Η ―à–Α―Ä–Η–Κ–Α–Φ–Η.