
![2021.8.23 3
ÒȘÇóí
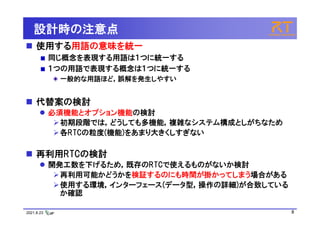
? ĐÔÄ܀ʀɀâșŹ€á€ż„·„č„Æ„à€Źș€ż€č€Ù€íÄż€ò±íŹF
re q [mo de l] ÒÆÓ„í „Ü„Ă „È [ÒÆ Ó„í„Ü „Ă„È(ŚÔÂÉ ÒÆÓ)]
<<requirement>>
ŚÔÂÉÒÆÓ
id =
text = "„æ©`„¶€ŹÖž¶š€·€ż
Äż”ĔۀȚ€ÇŁŹ°ČÈ«€ËÒÆÓ€Ç
€€ë€ł€È"
<<requirement>>
ŐÏșŠ Îï»Ű±Ü
id =
text = "„í„Ü„Ă„ÈÖÜȚx€ÎŐÏșŠ
Îï€ò»Ű±Ü€Ç€€ë€ł€È"
<<requirement>>
œU·ÉúłÉ
id =
text = "Äż”ĔۀȚ€Ç€ÎÒÆÓ
œU·€òŚÔÓ€ÇÉúłÉ€Ç€€ë€ł
€È"
<<requirement>>
ÒÆÓ
id =
text = "ÒÆÓÖžÁî€ËŸ€Ă€Æ
ÒÆÓ€č€ë€ł€È"
<<requirement>>
ŚÔŒș λÖĂÍƶš
id =
text = "„í„Ü„Ă„ÈŚÔÉí€ÎŹFÔÚ
λÖĂ€òÍƶš€Ç€€ë€ł€È"
<<requirement>>
hŸł”Űí
id =
text = "ÖÜȚxhŸł€Î”Űí€ò
łÖ€Ä€ł€È"
<<requirement>>
hŸł”Űí „Ț„Ă„Á „ó„°
id =
text = "ÖÜȚxhŸł€Î”Űí€È
ÍâœçÓy„»„󄔀ÎÓyœY
čû€«€é„Ț„Ă„Á„ó„°€òĐĐ€Š€ł€È"
<<requirement>>
„Ç„Ă „É„ì „ł„Ë„ó„°
id =
text = "Äڜ焻„󄔀ÎÓy
€ò»ù€ËŁŹŚÔ·Ö€ÎλÖĂ€òÍÆ
¶š€Ç€€ë€ł€È"
<<requirement>>
ÄÚœç „»„ó„”
id =
text = "„í„Ü„Ă„È€ÎÏà”Ä€Ê
ÒÆÓÁż€òÓy€Ç€€ë€ł€È"
<<requirement>>
ÖÜȚx hŸłÇéó€Î Óy
id =
text = "„í„Ü„Ă„ÈÖÜȚx€ÎhŸłÇé
ó€òÓy€Ç€€ë€ł€È"
<<requirement>>
ÒÆÓr ég
id =
text = "€Ê€ë€Ù€Ż¶Ì€€rég€Ç
Äż”ĔۀȚ€Ç”œß_€Ç€€ë€ł€È"
<<requirement>>
ßBŸAÒÆÓżÉ ÄÜŸàëx
id =
text = "€Ê€ë€Ù€ŻéLŸàëx€òÒÆ
ÓżÉÄ܀ǀą€ë€ł€È"
<<requirement>>
”ÍÏûÙMë ÁŠ»Ż
id =
text = "ÏûÙMëÁŠ€ò€Ê€ë€Ù
€ŻÏ€Ȁ뀳€È"
<<requirement>>
hŸł”ŰíŚÔ ÓÉúłÉ
id =
text = "ÖÜȚxhŸł€Î”Űí€òŚÔ
ӔĀËÉúłÉ€Ç€€ë€ł€È"
<<requirement>>
„æ©`„¶ „Ó„ê „Æ„Ł€Î ÏòÉÏ
id =
text = "ÊčÓĂr€Î„æ©`„¶€ÎŰ
”Ł€ò€Ê€ë€Ù€ŻĘXp€č€ë€ł€È"
<<requirement>>
”Űퟫ¶È €ÎÏòÉÏ
id =
text = "€Ê€ë€Ù€ŻžßŸ«¶È€Ê”Ű
í€òÉúłÉ€Ç€€ë€ł€È"
<<requirement>>
„Ń „ż©`„óÒÆÓ
id =
text = "Öž¶š€”€ì€ż„Ń„ż©`„ó
€ËŸ€Ă€ÆÒÆӀǀ€ë€ł€È"
<<requirement>>
ż ÂÊ”Ä€ÊŚÔÂÉ ÒÆÓ
id =
text = "„æ©`„¶€ŹÖž¶š€·€żÄż”ĔۀȚ
€ÇŁŹ€Ê€ë€Ù€Ż¶Ìrég€Ç°ČÈ«€ËÒÆÓ€Ç
€€ë€È€È€â€ËŁŹ„æ©`„¶€ÎÊÖég€ò€Ê€ë€Ù€Ż
ĘXp€·€Ä€ÄŁŹéLŸàëx€òÒÆÓżÉÄ܀ǀą
€ë€ł€È"
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>> <<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>](https://image.slidesharecdn.com/20210323scga-210827045258/85/RT-2021_-_1-3-320.jpg)
![2021.8.23 5
ÄÚČż„Ö„í„Ă„Żí
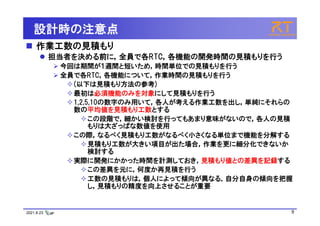
? „·„č„Æ„àłÉÒȘËŰég€ÎœÓŸAévS€òĂśŽ_€Ë€č€ë
? łÉÒȘËŰég€Ç€ä€ê€È€ê€č€ëÄÚÈĘ€òĂśŽ_€Ë€č€ë
? „·„č„Æ„à€òłÉ€č€ëÒȘËŰég€Ç€ä€êÈĄ€ê€č€ëÄÚÈĘ€ò±íŹF
ibd [Package ] ÒÆÓ„í„Ü„Ă „È [ÒÆÓ„í„Ü„Ă „È„·„č„Æ „à(SW)]
: ~„ì„ó„ž„Ç©`„ż : ~Éî¶È»Ïń
: ÖÜȚxhŸłÓy
: ~„ì„ó„ž„Ç©`„ż : ~Éî¶È»Ïń
: ~„ì„ó„ž„Ç©`„ż
: yÓò„»„ó„”ÖÆÓù[0..1]
: ~„ì„ó„ž„Ç©`„ż : ~Éî¶È»Ïń
: Ÿàëx»Ïń„»„ó„”ÖÆÓù[0 ..1]
: ~Éî¶È»Ïń
: „ì„ó„ž„Ç©`„ż : Éî¶È»Ïń
ÄżËλÖĂ: λÖĂ ÒÆÓÖžÁî: ~ËÙ¶È
: ŐÏșŠÎï»Ű±Ü
: „ì„ó„ž„Ç©`„ż : Éî¶È»Ïń
ÄżËλÖĂ: λÖĂ ÒÆÓÖžÁî: ~ËÙ¶È
: „ì„ó„ž„Ç©`„ż : Éî¶È»Ïń
ŹFÔÚλÖĂ: λÖĂ ÒÆÓÖžÁî: ~ËÙ¶È
: ”ŰíÉúłÉ
: „ì„ó„ž„Ç©`„ż : Éî¶È»Ïń
ŹFÔÚλÖĂ: λÖĂ ÒÆÓÖžÁî: ~ËÙ¶È
: „ì„ó„ž„Ç©`„ż : Éî¶È»Ïń
ŹFÔÚλÖĂ: ~λÖĂ
: ÒÆÓÁż
: ŚÔŒșλÖĂÍƶš
: „ì„ó„ž„Ç©`„ż : Éî¶È»Ïń
ŹFÔÚλÖĂ: ~λÖĂ
: ÒÆÓÁż
ŹFÔÚλÖĂ: λÖĂ
ÄżËλÖĂ: ~λÖĂ
: œU·ÉúłÉ
ŹFÔÚλÖĂ: λÖĂ
ÄżËλÖĂ: ~λÖĂ
ÒÆÓÖžÁî: ËÙ¶È
: ~ÒÆÓÁż
: ÒÆÓÖÆÓù
ÒÆÓÖžÁî: ËÙ¶È
: ~ÒÆÓÁż
Äż”ĔۀòÔO¶š€č€ë](https://image.slidesharecdn.com/20210323scga-210827045258/85/RT-2021_-_1-5-320.jpg)






























More Related Content
What's hot (20)
Similar to žé°Ő„ß„É„ë„Š„§„ą„”„Ț©`„„ă„ó„Ś2021łćÛ౟ÎäÖŸłć1 (20)


















More from openrtm (18)


















Recently uploaded (6)






žé°Ő„ß„É„ë„Š„§„ą„”„Ț©`„„ă„ó„Ś2021łćÛ౟ÎäÖŸłć1
- 1. RT„ß„É„ë„Š„§„ą SUMMER CAMP 2021 ł§ČâČőČŃłągÏ° ÈŐrŁș2021Äê8ÔÂ23ÈŐ(ÔÂ) 14:30Ą« ÖêÊœ»áÉç „°„í©`„Đ„ë„ą„·„č„È Û౟ ÎäÖŸ
- 2. 2021.8.23 Copyright (C) GLOBAL ASSIST Co., Ltd., All Rights Reserved. 2 ±ŸgÁ€ÎÄż”Ä ? „”„Ț©`„„ă„ó„Ś€òÍš€·€Æé_°k€òĐĐ€ŠÏó„·„č„Æ„à€ÎĂśŽ_»Ż ? ÔOÓ€òĐĐ€Š€Î€Ç€ą€ì€ĐŁŹ€œ€ÎöÏȚ€ê€Î¶ÀŚÔÓ·š€ÇÊÓ€òĐĐ€Š€Î€Ç€Ï€Ê€ŻŁŹË Ê€È€Ê€Ă€Æ€€€ëÓ·š€ÇÊÓ€òĐЀÀÆÓû€·€€ ? é_°k€·€żRT„ł„ó„Ę©`„Í„ó„Èč«é_r€ËŁŹÔOÓÇéó€â〻€Æč«é_€·€ÆÓû€·€€ ? áါ€éRT„ł„ó„Ę©`„Í„ó„È€òÀûÓĂ€č€ëÈˀ΀ż€á ? „”„Ț©`„„ă„󄌀DŽâ„Ç„ê„ó„°€òĐĐ€Ă€Æ€€€ëÀíÓÉ ? é_°kÄÚÈĘ€ÎŐhĂś ? €É€Î€è€Š€Ê„·„č„Æ„à€òé_°k€č€ë€Î€«Łżș΀ŹÌŰŐ€Ê€Î€«Łż€Ê€É ? „Á©`„àÄڀǀÎÒâËŒœyÒ»ŁŹßMĂčÜÀí ? ș΀òé_°k€č€ë€Î€«Łż€É€ŠgŚ°€č€ë€Î€«Łż€Ê€É ? €É€ł€Ț€Çé_°k€Ç€€Æ€€€ë€Î€«Łż
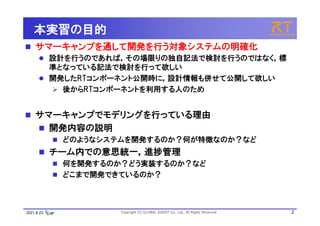
- 3. 2021.8.23 3 ÒȘÇóí ? ĐÔÄ܀ʀɀâșŹ€á€ż„·„č„Æ„à€Źș€ż€č€Ù€íÄż€ò±íŹF re q [mo de l] ÒÆÓ„í „Ü„Ă „È [ÒÆ Ó„í„Ü „Ă„È(ŚÔÂÉ ÒÆÓ)] <<requirement>> ŚÔÂÉÒÆÓ id = text = "„æ©`„¶€ŹÖž¶š€·€ż Äż”ĔۀȚ€ÇŁŹ°ČÈ«€ËÒÆÓ€Ç €€ë€ł€È" <<requirement>> ŐÏșŠ Îï»Ű±Ü id = text = "„í„Ü„Ă„ÈÖÜȚx€ÎŐÏșŠ Îï€ò»Ű±Ü€Ç€€ë€ł€È" <<requirement>> œU·ÉúłÉ id = text = "Äż”ĔۀȚ€Ç€ÎÒÆÓ œU·€òŚÔÓ€ÇÉúłÉ€Ç€€ë€ł €È" <<requirement>> ÒÆÓ id = text = "ÒÆÓÖžÁî€ËŸ€Ă€Æ ÒÆÓ€č€ë€ł€È" <<requirement>> ŚÔŒș λÖĂÍƶš id = text = "„í„Ü„Ă„ÈŚÔÉí€ÎŹFÔÚ Î»ÖĂ€òÍƶš€Ç€€ë€ł€È" <<requirement>> hŸł”Űí id = text = "ÖÜȚxhŸł€Î”Űí€ò łÖ€Ä€ł€È" <<requirement>> hŸł”Űí „Ț„Ă„Á „ó„° id = text = "ÖÜȚxhŸł€Î”Űí€È ÍâœçÓy„»„󄔀ÎÓyœY čû€«€é„Ț„Ă„Á„ó„°€òĐĐ€Š€ł€È" <<requirement>> „Ç„Ă „É„ì „ł„Ë„ó„° id = text = "Äڜ焻„󄔀ÎÓy €ò»ù€ËŁŹŚÔ·Ö€ÎλÖĂ€òÍÆ ¶š€Ç€€ë€ł€È" <<requirement>> ÄÚœç „»„ó„” id = text = "„í„Ü„Ă„È€ÎÏà”Ä€Ê ÒÆÓÁż€òÓy€Ç€€ë€ł€È" <<requirement>> ÖÜȚx hŸłÇéó€Î Óy id = text = "„í„Ü„Ă„ÈÖÜȚx€ÎhŸłÇé ó€òÓy€Ç€€ë€ł€È" <<requirement>> ÒÆÓr ég id = text = "€Ê€ë€Ù€Ż¶Ì€€rég€Ç Äż”ĔۀȚ€Ç”œß_€Ç€€ë€ł€È" <<requirement>> ßBŸAÒÆÓżÉ ÄÜŸàëx id = text = "€Ê€ë€Ù€ŻéLŸàëx€òÒÆ ÓżÉÄ܀ǀą€ë€ł€È" <<requirement>> ”ÍÏûÙMë ÁŠ»Ż id = text = "ÏûÙMëÁŠ€ò€Ê€ë€Ù €ŻÏ€Ȁ뀳€È" <<requirement>> hŸł”ŰíŚÔ ÓÉúłÉ id = text = "ÖÜȚxhŸł€Î”Űí€òŚÔ ӔĀËÉúłÉ€Ç€€ë€ł€È" <<requirement>> „æ©`„¶ „Ó„ê „Æ„Ł€Î ÏòÉÏ id = text = "ÊčÓĂr€Î„æ©`„¶€ÎŰ ”Ł€ò€Ê€ë€Ù€ŻĘXp€č€ë€ł€È" <<requirement>> ”Űퟫ¶È €ÎÏòÉÏ id = text = "€Ê€ë€Ù€ŻžßŸ«¶È€Ê”Ű í€òÉúłÉ€Ç€€ë€ł€È" <<requirement>> „Ń „ż©`„óÒÆÓ id = text = "Öž¶š€”€ì€ż„Ń„ż©`„ó €ËŸ€Ă€ÆÒÆӀǀ€ë€ł€È" <<requirement>> ż ÂÊ”Ä€ÊŚÔÂÉ ÒÆÓ id = text = "„æ©`„¶€ŹÖž¶š€·€żÄż”ĔۀȚ €ÇŁŹ€Ê€ë€Ù€Ż¶Ìrég€Ç°ČÈ«€ËÒÆÓ€Ç €€ë€È€È€â€ËŁŹ„æ©`„¶€ÎÊÖég€ò€Ê€ë€Ù€Ż ĘXp€·€Ä€ÄŁŹéLŸàëx€òÒÆÓżÉÄ܀ǀą €ë€ł€È" <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>>
- 4. 2021.8.23 4 ÒȘÇóí ? Äż”Ä ? é_°kÏó„·„č„Æ„à€ÎŐhĂś ? €É€Î€è€Š€ÊCÄÜŁŹÌŰŐ€òłÖ€Ă€ż„·„č„Æ„à€òșB€č€ë€Î€«Łż ? é_°kr€ÎßMĂčÜÀí ? €É€ł€Ț€ÇgŹF€Ç€€Æ€€€ë€Î€«Łż€òŽ_ŐJ ? é_°kr€ÎŽúÌæ°ž€ÎÊÓ ? ŚśłÉÊÖí ? ?ș΀ò?gŹF€č€ë„·„č„Æ„à€Ê€Î€«Łż€òÊÓ ? €œ€ì€Ÿ€ì€ÎÒȘÇó€ògŹF€č€ë€ż€á€Ë€ÏŁŹ?ș΀ò?ĐĐ€ï€Ê€€€È€€€±€Ê€€€Î€«Łż€òÊÓ ĄùÒȘÇóí€Ç€ÏŁŹŸßÌć”Ä€ÊgŹFÊֶ΀ÏÓÊö€·€Ê€€€ż€áŁŹ?€É€Î€è€Š€Ë?gŹF€č€ë€«€ÎÔŒ€Ï łőÆÚ¶ÎëA€Ç€Ïʀˀ·€Ê€€
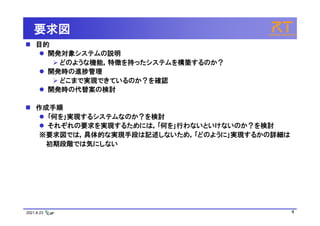
- 5. 2021.8.23 5 ÄÚČż„Ö„í„Ă„Żí ? „·„č„Æ„àłÉÒȘËŰég€ÎœÓŸAévS€òĂśŽ_€Ë€č€ë ? łÉÒȘËŰég€Ç€ä€ê€È€ê€č€ëÄÚÈĘ€òĂśŽ_€Ë€č€ë ? „·„č„Æ„à€òłÉ€č€ëÒȘËŰég€Ç€ä€êÈĄ€ê€č€ëÄÚÈĘ€ò±íŹF ibd [Package ] ÒÆÓ„í„Ü„Ă „È [ÒÆÓ„í„Ü„Ă „È„·„č„Æ „à(SW)] : ~„ì„ó„ž„Ç©`„ż : ~Éî¶È»Ïń : ÖÜȚxhŸłÓy : ~„ì„ó„ž„Ç©`„ż : ~Éî¶È»Ïń : ~„ì„ó„ž„Ç©`„ż : yÓò„»„ó„”ÖÆÓù[0..1] : ~„ì„ó„ž„Ç©`„ż : ~Éî¶È»Ïń : Ÿàëx»Ïń„»„ó„”ÖÆÓù[0 ..1] : ~Éî¶È»Ïń : „ì„ó„ž„Ç©`„ż : Éî¶È»Ïń ÄżËλÖĂ: λÖĂ ÒÆÓÖžÁî: ~ËÙ¶È : ŐÏșŠÎï»Ű±Ü : „ì„ó„ž„Ç©`„ż : Éî¶È»Ïń ÄżËλÖĂ: λÖĂ ÒÆÓÖžÁî: ~ËÙ¶È : „ì„ó„ž„Ç©`„ż : Éî¶È»Ïń ŹFÔÚλÖĂ: λÖĂ ÒÆÓÖžÁî: ~ËÙ¶È : ”ŰíÉúłÉ : „ì„ó„ž„Ç©`„ż : Éî¶È»Ïń ŹFÔÚλÖĂ: λÖĂ ÒÆÓÖžÁî: ~ËÙ¶È : „ì„ó„ž„Ç©`„ż : Éî¶È»Ïń ŹFÔÚλÖĂ: ~λÖĂ : ÒÆÓÁż : ŚÔŒșλÖĂÍƶš : „ì„ó„ž„Ç©`„ż : Éî¶È»Ïń ŹFÔÚλÖĂ: ~λÖĂ : ÒÆÓÁż ŹFÔÚλÖĂ: λÖĂ ÄżËλÖĂ: ~λÖĂ : œU·ÉúłÉ ŹFÔÚλÖĂ: λÖĂ ÄżËλÖĂ: ~λÖĂ ÒÆÓÖžÁî: ËÙ¶È : ~ÒÆÓÁż : ÒÆÓÖÆÓù ÒÆÓÖžÁî: ËÙ¶È : ~ÒÆÓÁż Äż”ĔۀòÔO¶š€č€ë
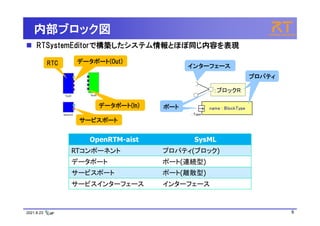
- 6. 2021.8.23 6 ÄÚČż„Ö„í„Ă„Żí ? RTSystemEditor€ÇșB€·€ż„·„č„Æ„àÇéó€È€Û€ÜÍŹ€žÄÚÈĘ€ò±íŹF RTC „Ç©`„ż„Ę©`„È(Out) „Ç©`„ż„Ę©`„È(In) „”©`„Ó„č„Ę©`„È Łș„Ö„í„Ă„ŻR name : BlockType : Type „Ś„í„Ń„Æ„Ł „Ę©`„È „Ę©`„È „€„ó„ż©`„Ő„§©`„č „Ś„í„Ń„Æ„Ł OpenRTM-aist SysML RT„ł„ó„Ę©`„Í„ó„È „Ś„í„Ń„Æ„Ł(„Ö„í„Ă„Ż) „Ç©`„ż„Ę©`„È „Ę©`„È(ßBŸAĐÍ) „”©`„Ó„č„Ę©`„È „Ę©`„È(ëxÉąĐÍ) „”©`„Ó„č„€„ó„ż©`„Ő„§©`„č „€„ó„ż©`„Ő„§©`„č
- 7. 2021.8.23 7 ÄÚČż„Ö„í„Ă„Żí ? ŚśłÉÊÖí ? ÊčÓĂ€č€ë„Ï©`„É„Š„§„ą€ÎÊÓ ? €É€ÎCČÄ€òÀûÓĂ€č€ë€Î€«ŁżČ»Śă€·€Æ€€€ëCČÄ€Ïș΀ʀ΀«Łż ? ±ŰÒȘ€ÊCÄÜ€ÎÊÓ ? €É€Î€è€Š€ÊRTC€ÇłÉ€č€ë€«Łż ? RTC€òĐÂÒé_°k€č€ë€Î€«ŁżŒÈŽæ€ÎRTC€òÔÙÀûÓĂ€č€ë€Î€«Łż ? RTCég€Î„€„ó„ż„é„Ż„·„ç„ó€ÎÊÓ ? RTCég€Ç€ä€êÈĄ€ê€č€ë„Ç©`„żŁŹ„ł„Ț„ó„É€ÎÊÓ ? žś„Ç©`„żĐÍŁŹ„€„ó„ż©`„Ő„§©`„č€ÎĂśŽ_»Ż ? ÊÓÊÂí ? ±ŰíCÄÜ€ÎĆĐ¶Ï ? Śî”ÍÏȚ€É€ÎCÄÜ€Ź±ŰÒȘ€Ê€Î€«Łż ? ÏÈíλ€ÎQ¶š ? €É€ÎRTC€«€éé_°k€òĐĐ€Š€Î€«Łż ? é_°kč€Êę€ÎÒ·e€â€ê ? žśCÄÜ€òé_°k€č€ë€Î€Ë±ŰÒȘ€Êč€Êę€Ï€É€ÎłÌ¶È€«Łż ? ŚśI·Ö”Ł€ÎÊÓ ? Ől€Ź€É€ÎRTC€òé_°k€č€ë€Î€«Łż
- 8. 2021.8.23 8 ÔOÓr€ÎŚąÒâ”ă ? ÊčÓĂ€č€ëÓĂŐZ€ÎÒâζ€òœyÒ» ÍŹ€žžĆÄî€ò±íŹF€č€ëÓĂŐZ€ÏŁ±€Ä€ËœyÒ»€č€ë Ł±€Ä€ÎÓĂŐZ€Ç±íŹF€č€ëžĆÄî€ÏŁ±€Ä€ËœyÒ»€č€ë Ò»°ă”Ä€ÊÓĂŐZ€Û€ÉŁŹŐ`œâ€ò°kÉú€·€ä€č€€ ? ŽúÌæ°ž€ÎÊÓ ? ±ŰíCÄ܀ȄȘ„Ś„·„ç„óCÄÜ€ÎÊÓ ?łőÆÚ¶ÎëA€Ç€ÏŁŹ€É€Š€·€Æ€â¶àCÄÜŁŹŃ}ëj€Ê„·„č„Æ„àłÉ€È€·€Ź€Á€Ê€ż€á ?žśRTC€ÎÁŁ¶È(CÄÜ)€ò€ą€Ț€êŽó€€Ż€·€č€ź€Ê€€ ? ÔÙÀûÓĂRTC€ÎÊÓ ? é_°kč€Êę€òÏ€Ȁ뀿€áŁŹŒÈŽæ€ÎRTC€ÇÊ耚€ë€â€Î€Ź€Ê€€€«ÊÓ ?ÔÙÀûÓĂżÉÄÜ€«€É€Š€«€òÊÔ^€č€ë€Î€Ë€ârég€Źì€«€Ă€Æ€·€Ț€ŠöșÏ€Ź€ą€ë ?ÊčÓĂ€č€ëhŸłŁŹ„€„ó„ż©`„Ő„§©`„č(„Ç©`„żĐÍŁŹČÙŚś€ÎÔŒ)€ŹșÏÖ€·€Æ€€€ë €«Ž_ŐJ
- 9. 2021.8.23 9 ÔOÓr€ÎŚąÒâ”ă ? ŚśIč€Êę€ÎÒ·e€â€ê ? ”Ł”±Ő߀òQ€á€ëÇ°€ËŁŹÈ«T€ÇžśRTCŁŹžśCÄÜ€Îé_°krég€ÎÒ·e€â€ê€òĐĐ€Š ? œń»Ű€ÏÆÚég€ŹŁ±ßLég€È¶Ì€€€ż€áŁŹrég gλ€Ç€ÎÒ·e€â€ê€òĐĐ€Š ? È«T€ÇžśRTCŁŹžśCÄ܀ˀĀ€€ÆŁŹŚśIrég€ÎÒ·e€â€ê€òĐĐ€Š ?(ÒÔÏ€ÏÒ·e€â€ê·œ·š€ÎČÎżŒ) ?Śîłő€Ï±ŰíCÄ܀΀߀òÏó€Ë€·€ÆÒ·e€â€ê€òĐĐ€Š ?1,2,5,10€ÎÊęŚÖ€Î€ßÓĂ€€€ÆŁŹžśÈË€ŹżŒ€š€ëŚśIč€Êę€òłö€·ŁŹ gŒ€Ë€œ€ì€é€Î Êę€ÎÆœŸù€òÒ·e€â€êč€Êę€È€č€ë ?€ł€Î¶ÎëA€ÇŁŹŒ€«€€ÊÓ€òĐĐ€Ă€Æ€â€ą€Ț€êÒâζ€Ź€Ê€€€Î€ÇŁŹžśÈË€ÎÒ·e €â€ê€ÏŽó€¶€Ă€Ń€ÊÊę€òÊčÓĂ ?€ł€ÎëHŁŹ€Ê€ë€Ù€ŻÒ·e€â€êč€Êꀏ€Ê€ë€Ù€ŻĐĄ€”€Ż€Ê€ë gλ€Ț€ÇCÄÜ€ò·Öœâ€č€ë ?Ò·e€â€êč€ÊꀏŽó€€€íÄż€Źłö€żöșÏŁŹŚśI€òžü€ËŒ·Ö»Ż€Ç€€Ê€€€« ÊÓ€č€ë ?gëH€Ëé_°k€Ë€«€«€Ă€żrég€òÓy€·€Æ€Ș€ŁŹÒ·e€â€ê€È€ÎČòÓćh€č€ë ?€ł€ÎČòÔȘ€ËŁŹșζȀ«ÔÙÒ·e€òĐĐ€Š ?č€Êę€ÎÒ·e€â€ê€ÏŁŹÈˀˀè€Ă€ÆAÏò€Źź€Ê€ëŁźŚÔ·ÖŚÔÉí€ÎAÏò€ò°ŃÎŐ €·ŁŹÒ·e€â€ê€ÎŸ«¶È€òÏòÉÏ€”€»€ë€ł€È€ŹÖŰÒȘ
- 10. 2021.8.23 10 ÔOÓr€ÎŚąÒâ”ă ? ŚśI„脱„ž„ć©`„ë€ÎÊÓ ? žśCÄ܀ΔŁ”±Ő߀ÎQ¶š ? ÉÏӀnjśłÉ€·€żÒ·e€â€êč€Êę€òČÎżŒ€ËŁŹÆÚégÄڀˌśI€ŹœK€ï€ë€«Łż€òŽ_ŐJ ? „”„Ț©`„„ă„ó„ŚÆÚégÖĐ€Ëé_°kżÉÄÜ€ÊrégÊęŁș17h/ÈË ?8/24(ÔÂ) 2h,25(»đ) 4h(+4h),26(Ëź) 6.5h(+5h),27(ÄŸ) 6.5h(+5h),28(œđ) 3h ?ÓŁș22h (36h) ? €â€·€âč€Êę”Ā˜K€ï€é€Ê€€€Î€Ç€ą€ì€ĐŁŹ€œ€â€œ€â€Î„脱„ž„ć©`„ë€ËoÀ퀏€ą€ë ? žśCÄÜ€Îé_°kí·Ź€ÎQ¶š ? „Ț„€„ë„č„È©`„ó€ÎÊÓ ? Ń}ÊęRTC€òÓĂ€€€żœYșÏÔòY€Î„ż„€„ß„ó„°€Ê€É ? ÊÓœYčû€ò»ù€ËŁŹŁČÈŐÄż15:00€«€éŁŹœń»Űé_°k€č€ë„·„č„Æ„à€ò°k±í€· €Æ퀀Ț€č