





![15
Visual SLAM ¤Ž¤Č¤į
? „ź„¢„ė„愤„ą¤Ź„«„į„é×ĖŻĶĘ¶Ø¤Īg¬F
ØC ¾ÖĖłµÄ¤Ź×īßm»Æ£ŗTracking + Local Mapping
ØC Č«ĢåµÄ¤Ź×īŹŹ»Æ£ŗLoop Closing
? ¾ÖĖłµÄ¤Ź×īßm»Æ¤Ą¤±ŠŠ¤¦ Visual Odometry (VO)
? Č«ĢåµÄ¤Ź×īŹŹ»Æ¤āæ¼] Visual SLAM
ØC Visual SLAM = VO + Loop Closing
? ORB SLAM¤Ē¤Ļ¤É¤Ī¤č¤¦¤Ė¤Ź¤Ć¤Ę¤¤¤ė¤«£æ](https://image.slidesharecdn.com/orb-slamtutorial-180526070949/85/SLAM-ORB-SLAM-16-320.jpg)
![20
2. Tracking
[ŹĖŹĀ1] ¬FŌŚ¤Ī„«„į„é×ĖŻ¤ņĒó¤į¤ė
1. »Ļń¤«¤éĢŲÕµć³é³ö
2. Ē°¤Ī»Ļń¤Č¤Īµć¤Īź¤ņĒó¤į¤ė
3. źµć¤ņĶ¶Ó°¤¹¤ė¤³¤Č¤Ē„«„į„é×ĖŻ¤Ī×īßm»Æ
»Ļń ?????1 »Ļń ????
(¬FŌŚræĢ)
?????1,??
?????1
?????1,??
????
????
?
µŲķ](https://image.slidesharecdn.com/orb-slamtutorial-180526070949/85/SLAM-ORB-SLAM-21-320.jpg)
![21
2. Tracking
[ŹĖŹĀ1] ¬FŌŚ¤Ī„«„į„é×ĖŻ¤ņĒó¤į¤ė
1. »Ļń¤«¤éĢŲÕµć³é³ö
2. Ē°¤Ī»Ļń¤Č¤Īµć¤Īź¤ņĒó¤į¤ė
3. źµć¤ņĶ¶Ó°¤¹¤ė¤³¤Č¤Ē„«„į„é×ĖŻ¤Ī×īßm»Æ
»Ļń ?????1 »Ļń ????
(¬FŌŚræĢ)
?????1,??
?????1
?????1,??
????
????
?
µŲķ
????,??](https://image.slidesharecdn.com/orb-slamtutorial-180526070949/85/SLAM-ORB-SLAM-22-320.jpg)
![22
2. Tracking
[ŹĖŹĀ1] ¬FŌŚ¤Ī„«„į„é×ĖŻ¤ņĒó¤į¤ė
1. »Ļń¤«¤éĢŲÕµć³é³ö
2. Ē°¤Ī»Ļń¤Č¤Īµć¤Īź¤ņĒó¤į¤ė
3. źµć¤ņĶ¶Ó°¤¹¤ė¤³¤Č¤Ē„«„į„é×ĖŻ¤Ī×īßm»Æ
»Ļń ?????1 »Ļń ????
(¬FŌŚræĢ)
?????1,??
?????1
?????1,??
????
????
?
µŲķ
????,??](https://image.slidesharecdn.com/orb-slamtutorial-180526070949/85/SLAM-ORB-SLAM-23-320.jpg)
![23
2. Tracking
[ŹĖŹĀ1] ¬FŌŚ¤Ī„«„į„é×ĖŻ¤ņĒó¤į¤ė
1. »Ļń¤«¤éĢŲÕµć³é³ö
2. Ē°¤Ī»Ļń¤Č¤Īµć¤Īź¤ņĒó¤į¤ė
3. źµć¤ņĶ¶Ó°¤¹¤ė¤³¤Č¤Ē„«„į„é×ĖŻ¤Ī×īßm»Æ
»Ļń ?????1 »Ļń ????
(¬FŌŚræĢ)
?????1,??
?????1
?????1,??
????
????
µŲķ
????,??
?????1,??](https://image.slidesharecdn.com/orb-slamtutorial-180526070949/85/SLAM-ORB-SLAM-24-320.jpg)
![24
2. Tracking
[ŹĖŹĀ1] ¬FŌŚ¤Ī„«„į„é×ĖŻ¤ņĒó¤į¤ė
1. »Ļń¤«¤éĢŲÕµć³é³ö
2. Ē°¤Ī»Ļń¤Č¤Īµć¤Īź¤ņĒó¤į¤ė
3. źµć¤ņĶ¶Ó°¤¹¤ė¤³¤Č¤Ē„«„į„é×ĖŻ¤Ī×īßm»Æ
»Ļń ?????1 »Ļń ????
(¬FŌŚræĢ)
?????1,??
?????1
?????1,??
????
????
µŲķ
????,??
?????1,??](https://image.slidesharecdn.com/orb-slamtutorial-180526070949/85/SLAM-ORB-SLAM-25-320.jpg)
![25
2. Tracking
[ŹĖŹĀ1] ¬FŌŚ¤Ī„«„į„é×ĖŻ¤ņĒó¤į¤ė
1. »Ļń¤«¤éĢŲÕµć³é³ö
2. Ē°¤Ī»Ļń¤Č¤Īµć¤Īź¤ņĒó¤į¤ė
3. źµć¤ņĶ¶Ó°¤¹¤ė¤³¤Č¤Ē„«„į„é×ĖŻ¤Ī×īßm»Æ
[ŹĖŹĀ2] µŲķ¤Ė±£“ę¤¹¤ė¤«¤ĪQ¶Ø
ØC °ræĢ¤Ī»Ļń¤ņ±£“ę¤¹¤ė¤Č„į„ā„ź/ÓĖćĮæµÄ¤Ė°kÉ¢¤¹
¤ė¤æ¤į, ČßéL¤Ė¤Ź¤é¤Ź¤¤¤č¤¦¤Ė»Ļń¤ņßxk(¾¤Æ)
? KeyFrame (KF)](https://image.slidesharecdn.com/orb-slamtutorial-180526070949/85/SLAM-ORB-SLAM-26-320.jpg)
![26
3. Local Mapping
[ŹĖŹĀ1] µŲķ¤Ī×÷³É
Tracking¤«¤é¶É¤µ¤ģ¤æ»Ļń(KFnew)¤ņµŲķ¤Ė×·¼Ó¤¹¤ė
1. Covisibility Graph¤ĪøüŠĀ
2. GraphÉĻ¤ĒėO½Ó¤¹¤ėKFČŗ¤Č¤Ī±ČŻ^¤ĒŠĀ¤·¤¤µć¤ņ×·¼Ó
3. ¤³¤Ī¹ ģ¤Ēµć¤Č„«„į„é×ĖŻ¤Ī×īßm»Æ(Local BA)
Covisibility Graph
?](https://image.slidesharecdn.com/orb-slamtutorial-180526070949/85/SLAM-ORB-SLAM-27-320.jpg)
![27
3. Local Mapping
[ŹĖŹĀ1] µŲķ¤Ī×÷³É
Tracking¤«¤é¶É¤µ¤ģ¤æ»Ļń(KFnew)¤ņµŲķ¤Ė×·¼Ó¤¹¤ė
1. Covisibility Graph¤ĪøüŠĀ
2. GraphÉĻ¤ĒėO½Ó¤¹¤ėKFČŗ¤Č¤Ī±ČŻ^¤ĒŠĀ¤·¤¤µć¤ņ×·¼Ó
3. ¤³¤Ī¹ ģ¤Ēµć¤Č„«„į„é×ĖŻ¤Ī×īßm»Æ(Local BA)
Covisibility GraphøüŠĀ!](https://image.slidesharecdn.com/orb-slamtutorial-180526070949/85/SLAM-ORB-SLAM-28-320.jpg)
![28
3. Local Mapping
[ŹĖŹĀ1] µŲķ¤Ī×÷³É
Tracking¤«¤é¶É¤µ¤ģ¤æ»Ļń(KFnew)¤ņµŲķ¤Ė×·¼Ó¤¹¤ė
1. Covisibility Graph¤ĪøüŠĀ
2. GraphÉĻ¤ĒėO½Ó¤¹¤ėKFČŗ¤Č¤Ī±ČŻ^¤ĒŠĀ¤·¤¤µć¤ņ×·¼Ó
3. ¤³¤Ī¹ ģ¤Ēµć¤Č„«„į„é×ĖŻ¤Ī×īßm»Æ(Local BA)
Covisibility Graph
ėO½Ó¤¹¤ėKFČŗ](https://image.slidesharecdn.com/orb-slamtutorial-180526070949/85/SLAM-ORB-SLAM-29-320.jpg)
![29
3. Local Mapping
[ŹĖŹĀ1] µŲķ¤Ī×÷³É
Tracking¤«¤é¶É¤µ¤ģ¤æ»Ļń(KFnew)¤ņµŲķ¤Ė×·¼Ó¤¹¤ė
1. Covisibility Graph¤ĪøüŠĀ
2. GraphÉĻ¤ĒėO½Ó¤¹¤ėKFČŗ¤Č¤Ī±ČŻ^¤ĒŠĀ¤·¤¤µć¤ņ×·¼Ó
3. ¤³¤Ī¹ ģ¤Ēµć¤Č„«„į„é×ĖŻ¤Ī×īßm»Æ(Local BA)
Covisibility Graph
×·¼Ó!
ėO½Ó¤¹¤ėKFČŗ](https://image.slidesharecdn.com/orb-slamtutorial-180526070949/85/SLAM-ORB-SLAM-30-320.jpg)
![30
3. Local Mapping
[ŹĖŹĀ1] µŲķ¤Ī×÷³É
Tracking¤«¤é¶É¤µ¤ģ¤æ»Ļń(KFnew)¤ņµŲķ¤Ė×·¼Ó¤¹¤ė
1. Covisibility Graph¤ĪøüŠĀ
2. GraphÉĻ¤ĒėO½Ó¤¹¤ėKFČŗ¤Č¤Ī±ČŻ^¤ĒŠĀ¤·¤¤µć¤ņ×·¼Ó
3. ¤³¤Ī¹ ģ¤Ēµć¤Č„«„į„é×ĖŻ¤Ī×īßm»Æ (Local BA)
Covisibility Graph
Local¤Ź×īßm»Æ
ėO½Ó¤¹¤ėKFČŗ](https://image.slidesharecdn.com/orb-slamtutorial-180526070949/85/SLAM-ORB-SLAM-31-320.jpg)
![31
3. Local Mapping
[ŹĖŹĀ1] µŲķ¤Ī×÷³É
Tracking¤«¤é¶É¤µ¤ģ¤æ»Ļń(KFnew)¤ņµŲķ¤Ė×·¼Ó¤¹¤ė
1. Covisibility Graph¤ĪøüŠĀ
2. GraphÉĻ¤ĒėO½Ó¤¹¤ėKFČŗ¤Č¤Ī±ČŻ^¤ĒŠĀ¤·¤¤µć¤ņ×·¼Ó
3. ¤³¤Ī¹ ģ¤Ēµć¤Č„«„į„é×ĖŻ¤Ī×īßm»Æ(Local BA)
[ŹĖŹĀ2] µŲķ¤ĪŠŽÕż
ØC KF¤ņ±OŅ¤·,ČßéL¤ŹKF¤ņ³żĶā¤¹¤ė(
¤·¤Æ)
? Arrival of the fittest](https://image.slidesharecdn.com/orb-slamtutorial-180526070949/85/SLAM-ORB-SLAM-32-320.jpg)
![32
4. Loop Closing
[ŹĖŹĀ] Loop closing¤Ė¤č¤ėČ«Ģå×īßm»Æ
1. µŲķ¤Ė·Čė¤µ¤ģ¤æKF¤¬¼Č¤ĖŅ¤æ¤³¤Č¤¬¤¢¤ė¤«£æ
? ORBĢŲÕĮ椫¤é³É¤·¤æBag of Words (BoW)
»ĻńĢŲÕĮæĶ¬Źæ¤Ī±ČŻ^
2. Loop¤ņŹÖŖ¤·¤æ¤é¤½¤ģ¤é¤ņ½Y¤Ö¤č¤¦¤Ė×īßm»Æ
? Essential Graph¤Ė¤č¤ė„¹„±©`„ė¤ņŗ¬¤į¤æ×īßm»Æ
?
Covisibility Graph](https://image.slidesharecdn.com/orb-slamtutorial-180526070949/85/SLAM-ORB-SLAM-33-320.jpg)
![33
4. Loop Closing
[ŹĖŹĀ] Loop closing¤Ė¤č¤ėČ«Ģå×īßm»Æ
1. µŲķ¤Ė·Čė¤µ¤ģ¤æKF¤¬¼Č¤ĖŅ¤æ¤³¤Č¤¬¤¢¤ė¤«£æ
? ORBĢŲÕĮ椫¤é³É¤·¤æBag of Words (BoW)
»ĻńĢŲÕĮæĶ¬Źæ¤Ī±ČŻ^
2. Loop¤ņŹÖŖ¤·¤æ¤é¤½¤ģ¤é¤ņ½Y¤Ö¤č¤¦¤Ė×īßm»Æ
? Essential Graph¤Ė¤č¤ė„¹„±©`„ė¤ņŗ¬¤į¤æ×īßm»Æ
?
Essential Graph](https://image.slidesharecdn.com/orb-slamtutorial-180526070949/85/SLAM-ORB-SLAM-34-320.jpg)
![34
4. Loop Closing
[ŹĖŹĀ] Loop closing¤Ė¤č¤ėČ«Ģå×īßm»Æ
1. µŲķ¤Ė·Čė¤µ¤ģ¤æKF¤¬¼Č¤ĖŅ¤æ¤³¤Č¤¬¤¢¤ė¤«£æ
? ORBĢŲÕĮ椫¤é³É¤·¤æBag of Words (BoW)
»ĻńĢŲÕĮæĶ¬Źæ¤Ī±ČŻ^
2. Loop¤ņŹÖŖ¤·¤æ¤é¤½¤ģ¤é¤ņ½Y¤Ö¤č¤¦¤Ė×īßm»Æ
? Essential Graph¤Ė¤č¤ė„¹„±©`„ė¤ņŗ¬¤į¤æ×īßm»Æ
Essential Graph
Loop Closed!
Sim(3) Č«Ģå×īßm»Æ](https://image.slidesharecdn.com/orb-slamtutorial-180526070949/85/SLAM-ORB-SLAM-35-320.jpg)
![35
¤Ž¤Č¤į
? Visual SLAM
ØC Tracking + Local Mapping + Loop Closing
? ORB-SLAM
ØC ORBĢŲÕĮæ¤Ē»Ļńég¤Īź¤ņQ¶Ø¤·Čż“ĪŌŖĶŌŖ
ØC Tracking¤¬µŲķ¤Ė¤¹¤Ł¤»Ļń(KeyFrame)¤ņßxk,
Local Mapping¤¬¤½¤ģ¤ņµŲķ¤Ė×·¼Ó/ŠŽÕż¤¹¤ė
? Covisibility Graph¤Ė¤č¤ėLocal BA
ØC Loop Closing¤ĻBoW»ĻńĢŲÕĮæ¤Ē»Ļńég¤ĪĢŲÕĮæ¤Ī
½ü¤µ¤ņÓĖ椷, Loop¤ņé]¤ø¤ė¤č¤¦¤ĖSim(3)×īßm»Æ
? Essential Graph¤ĪĄūÓĆ](https://image.slidesharecdn.com/orb-slamtutorial-180526070949/85/SLAM-ORB-SLAM-36-320.jpg)
![36
ORB-SLAM¤ĪĮ¢¤ĮĪ»ÖĆ
? Visual SLAM¤Ī·Öī Direct vs Feature, Dense vs Sparse
ŹÖ·Ø Direct (»ĖŲ¤ņÖ±½ÓĄūÓĆ) Feature (ĢŲÕĮæ¤ņ³é³ö¤·ĄūÓĆ)
Sparse
(»Ļń¤«¤éÆE¤Ė³é³ö
¤µ¤ģ¤æµć¤Ī¤ßĄūÓĆ)
Direct Sparse Odometry
[Engel+, 2016]
ORB-SLAM
[Mur-Artal+, 2015]
Dense/
Semi-Dense
(»ĻńČ«Ģå/
Żx¶Č¹“Åä¤Īøߤ¤
īIÓņ¤Īµć¤ņĆܤĖĄūÓĆ)
LSD-SLAM [Engel+, 2014]
SLAM¤Ē¤ĻĢŲ¤Ė¤Ź¤·
(Optical FlowµČ)](https://image.slidesharecdn.com/orb-slamtutorial-180526070949/85/SLAM-ORB-SLAM-37-320.jpg)
³§³¢“”²Ń„Į„å©`„Č„ź„¢„ė“ó»į׏ĮĻ(°æø鵞-³§³¢“”²Ń)
- 1. µŚ£±»Ų 3DĆć»į@év| (2018/05/27) (SLAM„Į„å©`„Č„ź„¢„ė“ó»į) ÕĪĽB½é: ORB-SLAM |¾©“óѧ ĻąÉŃŠ¾æŹŅĖłŹō M1 ½š×Ó ÕęŅ² (@syinari0123)
- 2. 1 ×Ō¼ŗ½B½é ? ŹĻĆū ØC ½š×Ó ÕęŅ² (¤«¤Ķ¤³ ¤Ž¤µ¤ä) ? ĖłŹō ØC |¾©“óѧ“óѧŌŗ ѧėHĒéóѧø® ĻąÉŃŠ M1 ? ÅdĪ¶ ØC Visual SLAM/SfM, ÉīÓѧĮ ØC ”øÄĖľŪą46„į„ó„Š©`¤ņÓ»¤«¤éČż“ĪŌŖ¤ŲĶŌŖ¤¹¤ė”¹ (https://qiita.com/syinari0123/items/f8b8ae08a80002361855)
- 3. 2 ±¾°k±ķ¤ĪÄæĖ ? »Ļń¤«¤éČż“ĪŌŖĶŌŖ¤ņŠŠ¤¦Visual SLAM¤ĪŌ ØC ČėĮ¦¤Ļ”ø»Ļń”¹, ½ń»Ų¤Ļ gŃŪ„«„į„é»Ļń ØC „ź„¢„ė„愤„ą°ęSfM ? Visual SLAM¤Ī“ś±ķĄż¤Č¤·¤Ę¤ĪORB-SLAM ØC „ź„¢„ė„愤„ą¤ŹSfM¤ņg¬F¤¹¤ėC¤Ī“óėj°Ń¤ŹĄķ½ā ? øßĖŁ»Æ£ææĀŹ»Æ£æ ØC Ō¤·¤¤ÄŚČŻ¤ĻÕĪÄ or ŅŌĻĀ¤Ī„į„ā„¹„鄤„É ? ”ø°æø鵞-³§³¢“”²Ń¤ĪŹÖ·Ø½āÕh”¹ (/MasayaKaneko/orbslam-84842802)
- 4. 3 SfM¤Ī¤Ŗ¤µ¤é¤¤ ? SfM (Structure from Motion) ØC ī}ŌO¶Ø ? ČėĮ¦£ŗ”©¤ŹŅµć¤Ē“éÓ°¤µ¤ģ¤æ»ĻńČŗ ? ³öĮ¦£ŗ„«„į„é×ĖŻĶĘ¶Ø + Čż“ĪŌŖŌģĶŌŖ »ĻńČŗ „«„į„é×ĖŻĶĘ¶Ø + Čż“ĪŌŖŌģĶŌŖ
- 5. 4 SfM vs Visual SLAM ? Visual SLAM (Simultaneous Localization and Mapping) ØC „ź„¢„ė„愤„ą¤ĖSfM¤ņ½ā¤Æī} ? »Ļń¤¬ČėĮ¦¤µ¤ģ¤ė¶Č¤Ė„«„į„é×ĖŻ¤ņĶĘ¶Ø Ó³Ļń „«„į„é×ĖŻĶĘ¶Ø + Čż“ĪŌŖŌģĶŌŖ
- 6. 5 SfM vs Visual SLAM ? ī}ŌO¶Ø¤Īß`¤¤ ŹÖ·Ø SfM Visual SLAM Ö÷¤ŹÄæµÄ ĪļĢå¤ĪČż“ĪŌŖŌģ¤ĪĶŌŖ „ź„¢„ė„愤„ą¤Ź„«„į„é×ĖŻĶĘ¶Ø „Ē©`„æ¤Ī Óė¤Ø·½ »ĻńČŗČ«¤ĘŹ¹¤Ø¤ė Öš“ĪµÄ¤Ė»Ļń¤¬·Čė ī}ŌO¶Ø Õż“_ŠŌ >>> ĖŁ¶Č Õż“_ŠŌ < ĖŁ¶Č ½Y¹ūĄż
- 7. 6 Öš“ĪµÄ¤Ź×ĖŻĶĘ¶Ø ? Öš“ĪµÄ¤Ź„«„į„é×ĖŻĶĘ¶Ø¤ņ¤É¤Ī¤č¤¦¤ĖŠŠ¤¦¤«£æ ? ×Ō¼ŗĪ»ÖĆĶĘ¶Ø¤ČµŲķ×÷³É¤ņ½»»„¤ĖŠŠ¤¤g¬F (Simultaneous Localization and Mapping) Tracking Local Mapping µŲķ¤ĖµĒåh¤¹¤ė »Ļń¤ņßxk µŲķ¤ĪĢį¹© ¬FŌŚ¤Ī„«„į„é×ĖŻ¤ņĒó¤į¤ė µŲķ¤Ī×÷³É/ŠŽÕż
- 8. 7 Öš“ĪµÄ¤Ź×ĖŻĶĘ¶Ø ? Öš“ĪµÄ¤Ź„«„į„é×ĖŻĶĘ¶Ø¤ņ¤É¤Ī¤č¤¦¤ĖŠŠ¤¦¤«£æ ? ×Ō¼ŗĪ»ÖĆĶĘ¶Ø¤ČµŲķ×÷³É¤ņ½»»„¤ĖŠŠ¤¤g¬F (Simultaneous Localization and Mapping) ræĢ t-1 ß^Č„¤Ī „«„į„é¤ĪÜŪE ¬FŌŚræĢ t ? µŲķ ĶŌŖ¤·¤æ Čż“ĪŌŖŌģ Tracking Local Mapping µŲķ¤ĖµĒåh¤¹¤ė »Ļń¤ņßxk µŲķ¤ĪĢį¹© ¬FŌŚ¤Ī„«„į„é×ĖŻ¤ņĒó¤į¤ė µŲķ¤Ī×÷³É/ŠŽÕż
- 9. 8 Öš“ĪµÄ¤Ź×ĖŻĶĘ¶Ø ? Öš“ĪµÄ¤Ź„«„į„é×ĖŻĶĘ¶Ø¤ņ¤É¤Ī¤č¤¦¤ĖŠŠ¤¦¤«£æ ? ×Ō¼ŗĪ»ÖĆĶĘ¶Ø¤ČµŲķ×÷³É¤ņ½»»„¤ĖŠŠ¤¤g¬F (Simultaneous Localization and Mapping) Tracking Local Mapping µŲķ¤ĖµĒåh¤¹¤ė »Ļń¤ņßxk µŲķ¤ĪĢį¹© ¬FŌŚ¤Ī„«„į„é×ĖŻ¤ņĒó¤į¤ė µŲķ¤Ī×÷³É/ŠŽÕż ræĢ t-1 ß^Č„¤Ī „«„į„é¤ĪÜŪE ¬FŌŚræĢ t ? µŲķ ĶŌŖ¤·¤æ Čż“ĪŌŖŌģ
- 10. 9 Öš“ĪµÄ¤Ź×ĖŻĶĘ¶Ø ? Öš“ĪµÄ¤Ź„«„į„é×ĖŻĶĘ¶Ø¤ņ¤É¤Ī¤č¤¦¤ĖŠŠ¤¦¤«£æ ? ×Ō¼ŗĪ»ÖĆĶĘ¶Ø¤ČµŲķ×÷³É¤ņ½»»„¤ĖŠŠ¤¤g¬F (Simultaneous Localization and Mapping) ræĢ t-1 ß^Č„¤Ī „«„į„é¤ĪÜŪE ¬FŌŚræĢ t ? µŲķ ĶŌŖ¤·¤æ Čż“ĪŌŖŌģ ¾ÖĖłµÄ¤Ź×īßm»Æ Tracking Local Mapping µŲķ¤ĖµĒåh¤¹¤ė »Ļń¤ņßxk µŲķ¤ĪĢį¹© ¬FŌŚ¤Ī„«„į„é×ĖŻ¤ņĒó¤į¤ė µŲķ¤Ī×÷³É/ŠŽÕż
- 11. 10 Öš“ĪµÄ¤Ź×ĖŻĶĘ¶Ø ? Öš“ĪµÄ¤Ź„«„į„é×ĖŻĶĘ¶Ø¤ņ¤É¤Ī¤č¤¦¤ĖŠŠ¤¦¤«£æ ? ×Ō¼ŗĪ»ÖĆĶĘ¶Ø¤ČµŲķ×÷³É¤ņ½»»„¤ĖŠŠ¤¤g¬F (Simultaneous Localization and Mapping) ræĢ t-1 ß^Č„¤Ī „«„į„é¤ĪÜŪE ¬FŌŚræĢ t µŲķ ĶŌŖ¤·¤æ Čż“ĪŌŖŌģ Tracking Local Mapping µŲķ¤ĖµĒåh¤¹¤ė »Ļń¤ņßxk µŲķ¤ĪĢį¹© ¬FŌŚ¤Ī„«„į„é×ĖŻ¤ņĒó¤į¤ė µŲķ¤Ī×÷³É/ŠŽÕż
- 12. ? Öš“ĪµÄ¤Ź„«„į„é×ĖŻĶĘ¶Ø¤ņ¤É¤Ī¤č¤¦¤ĖŠŠ¤¦¤«£æ ? ×Ō¼ŗĪ»ÖĆĶĘ¶Ø¤ČµŲķ×÷³É¤ņ½»»„¤ĖŠŠ¤¤g¬F (Simultaneous Localization and Mapping) 11 Öš“ĪµÄ¤Ź×ĖŻĶĘ¶Ø Tracking Local Mapping µŲķ¤ĖµĒåh¤¹¤ė »Ļń¤ņßxk µŲķ¤ĪĢį¹© ¬FŌŚ¤Ī„«„į„é×ĖŻ¤ņĒó¤į¤ė µŲķ¤Ī×÷³É/ŠŽÕż ræĢ t-1 ß^Č„¤Ī „«„į„é¤ĪÜŪE ¬FŌŚræĢ t µŲķ ĶŌŖ¤·¤æ Čż“ĪŌŖŌģ
- 13. ? Öš“ĪµÄ¤Ź„«„į„é×ĖŻĶĘ¶Ø¤ņ¤É¤Ī¤č¤¦¤ĖŠŠ¤¦¤«£æ ? ×Ō¼ŗĪ»ÖĆĶĘ¶Ø¤ČµŲķ×÷³É¤ņ½»»„¤ĖŠŠ¤¤g¬F (Simultaneous Localization and Mapping) 12 Öš“ĪµÄ¤Ź×ĖŻĶĘ¶Ø ræĢ t-1 ß^Č„¤Ī „«„į„é¤ĪÜŪE ¬FŌŚræĢ t µŲķ ĶŌŖ¤·¤æ Čż“ĪŌŖŌģ Tracking Local Mapping µŲķ¤ĖµĒåh¤¹¤ė »Ļń¤ņßxk µŲķ¤ĪĢį¹© ¬FŌŚ¤Ī„«„į„é×ĖŻ¤ņĒó¤į¤ė µŲķ¤Ī×÷³É/ŠŽÕż
- 14. 13 Öš“ĪµÄ¤Ź×ĖŻĶĘ¶Ø ? Öš“ĪµÄ¤Ź„«„į„é×ĖŻĶĘ¶Ø¤ņ¤É¤Ī¤č¤¦¤ĖŠŠ¤¦¤«£æ ? ×Ō¼ŗĪ»ÖĆĶĘ¶Ø¤ČµŲķ×÷³É¤ņ½»»„¤ĖŠŠ¤¤g¬F (Simultaneous Localization and Mapping) ræĢ t-1 ß^Č„¤Ī „«„į„é¤ĪÜŪE µŲķ ĶŌŖ¤·¤æ Čż“ĪŌŖŌģ ? ræĢ t ¬FŌŚræĢ t+1 ” Tracking Local Mapping µŲķ¤ĖµĒåh¤¹¤ė »Ļń¤ņßxk µŲķ¤ĪĢį¹© ¬FŌŚ¤Ī„«„į„é×ĖŻ¤ņĒó¤į¤ė µŲķ¤Ī×÷³É/ŠŽÕż
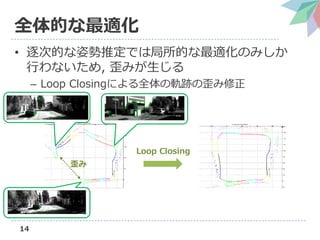
- 15. 14 Č«ĢåµÄ¤Ź×īŹŹ»Æ ? Öš“ĪµÄ¤Ź×ĖŻĶĘ¶Ø¤Ē¤Ļ¾ÖĖłµÄ¤Ź×īßm»Æ¤Ī¤ß¤·¤« ŠŠ¤ļ¤Ź¤¤¤æ¤į, Ķį¤ß¤¬Éś¤ø¤ė ØC Loop Closing¤Ė¤č¤ėČ«Ģå¤ĪÜŪE¤ĪĶį¤ßŠŽÕż Loop Closing Ķį¤ß
- 16. 15 Visual SLAM ¤Ž¤Č¤į ? „ź„¢„ė„愤„ą¤Ź„«„į„é×ĖŻĶĘ¶Ø¤Īg¬F ØC ¾ÖĖłµÄ¤Ź×īßm»Æ£ŗTracking + Local Mapping ØC Č«ĢåµÄ¤Ź×īŹŹ»Æ£ŗLoop Closing ? ¾ÖĖłµÄ¤Ź×īßm»Æ¤Ą¤±ŠŠ¤¦ Visual Odometry (VO) ? Č«ĢåµÄ¤Ź×īŹŹ»Æ¤āæ¼] Visual SLAM ØC Visual SLAM = VO + Loop Closing ? ORB SLAM¤Ē¤Ļ¤É¤Ī¤č¤¦¤Ė¤Ź¤Ć¤Ę¤¤¤ė¤«£æ
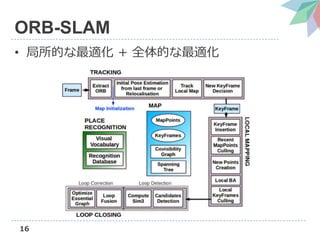
- 17. 16 ORB-SLAM ? ¾ÖĖłµÄ¤Ź×īßm»Æ + Č«ĢåµÄ¤Ź×īŹŹ»Æ
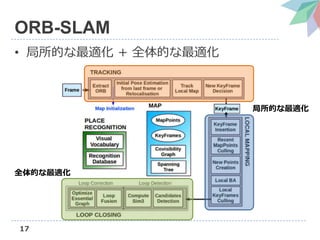
- 18. 17 ORB-SLAM ? ¾ÖĖłµÄ¤Ź×īßm»Æ + Č«ĢåµÄ¤Ź×īŹŹ»Æ Č«ĢåµÄ¤Ź×īŹŹ»Æ ¾ÖĖłµÄ¤Ź×īßm»Æ
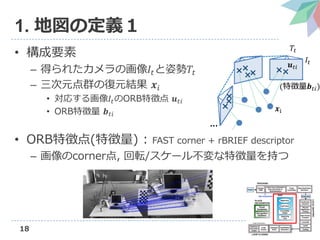
- 19. 18 1. µŲķ¤Ī¶ØĮx£± ? ³ÉŅŖĖŲ ØC µĆ¤é¤ģ¤æ„«„į„é¤Ī»Ļń????¤Č×ĖŻ???? ØC Čż“ĪŌŖµćČŗ¤ĪĶŌŖ½Y¹ū ???? ? ź¤¹¤ė»Ļń????¤ĪORBĢŲÕµć ?????? ? ORBĢŲÕĮæ ?????? ? ORBĢŲÕµć(ĢŲÕĮæ) : FAST corner + rBRIEF descriptor ØC »Ļń¤Īcornerµć, »ŲÜ/„¹„±©`„ė²»ä¤ŹĢŲÕĮæ¤ņ³Ö¤Ä ???? ???? ?????? ???? ” (ĢŲÕĮæ??????)
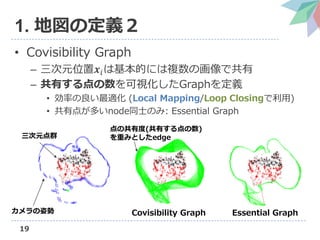
- 20. 19 1. µŲķ¤Ī¶ØĮx£² ? Covisibility Graph ØC Čż“ĪŌŖĪ»ÖĆ????¤Ļ»ł±¾µÄ¤Ė¤ĻŃ}Źż¤Ī»Ļń¤Ē¹²ÓŠ ØC ¹²ÓŠ¤¹¤ėµć¤ĪŹż¤ņæÉŅ»Æ¤·¤æGraph¤ņ¶ØĮx ? æĀŹ¤ĪĮ¼¤¤×īßm»Æ (Local Mapping/Loop Closing¤ĒĄūÓĆ) ? ¹²ÓŠµć¤¬¶ą¤¤nodeĶ¬Źæ¤Ī¤ß: Essential Graph Covisibility Graph Essential Graph„«„į„é¤Ī×ĖŻ Čż“ĪŌŖµćČŗ µć¤Ī¹²ÓŠ¶Č(¹²ÓŠ¤¹¤ėµć¤ĪŹż) ¤ņÖŲ¤ß¤Č¤·¤æedge
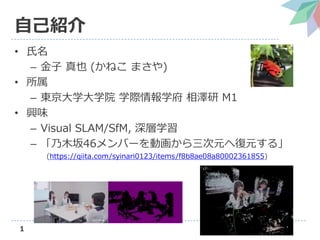
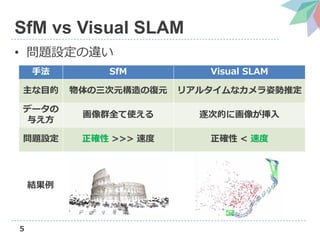
- 21. 20 2. Tracking [ŹĖŹĀ1] ¬FŌŚ¤Ī„«„į„é×ĖŻ¤ņĒó¤į¤ė 1. »Ļń¤«¤éĢŲÕµć³é³ö 2. Ē°¤Ī»Ļń¤Č¤Īµć¤Īź¤ņĒó¤į¤ė 3. źµć¤ņĶ¶Ó°¤¹¤ė¤³¤Č¤Ē„«„į„é×ĖŻ¤Ī×īßm»Æ »Ļń ?????1 »Ļń ???? (¬FŌŚræĢ) ?????1,?? ?????1 ?????1,?? ???? ???? ? µŲķ
- 22. 21 2. Tracking [ŹĖŹĀ1] ¬FŌŚ¤Ī„«„į„é×ĖŻ¤ņĒó¤į¤ė 1. »Ļń¤«¤éĢŲÕµć³é³ö 2. Ē°¤Ī»Ļń¤Č¤Īµć¤Īź¤ņĒó¤į¤ė 3. źµć¤ņĶ¶Ó°¤¹¤ė¤³¤Č¤Ē„«„į„é×ĖŻ¤Ī×īßm»Æ »Ļń ?????1 »Ļń ???? (¬FŌŚræĢ) ?????1,?? ?????1 ?????1,?? ???? ???? ? µŲķ ????,??
- 23. 22 2. Tracking [ŹĖŹĀ1] ¬FŌŚ¤Ī„«„į„é×ĖŻ¤ņĒó¤į¤ė 1. »Ļń¤«¤éĢŲÕµć³é³ö 2. Ē°¤Ī»Ļń¤Č¤Īµć¤Īź¤ņĒó¤į¤ė 3. źµć¤ņĶ¶Ó°¤¹¤ė¤³¤Č¤Ē„«„į„é×ĖŻ¤Ī×īßm»Æ »Ļń ?????1 »Ļń ???? (¬FŌŚræĢ) ?????1,?? ?????1 ?????1,?? ???? ???? ? µŲķ ????,??
- 24. 23 2. Tracking [ŹĖŹĀ1] ¬FŌŚ¤Ī„«„į„é×ĖŻ¤ņĒó¤į¤ė 1. »Ļń¤«¤éĢŲÕµć³é³ö 2. Ē°¤Ī»Ļń¤Č¤Īµć¤Īź¤ņĒó¤į¤ė 3. źµć¤ņĶ¶Ó°¤¹¤ė¤³¤Č¤Ē„«„į„é×ĖŻ¤Ī×īßm»Æ »Ļń ?????1 »Ļń ???? (¬FŌŚræĢ) ?????1,?? ?????1 ?????1,?? ???? ???? µŲķ ????,?? ?????1,??
- 25. 24 2. Tracking [ŹĖŹĀ1] ¬FŌŚ¤Ī„«„į„é×ĖŻ¤ņĒó¤į¤ė 1. »Ļń¤«¤éĢŲÕµć³é³ö 2. Ē°¤Ī»Ļń¤Č¤Īµć¤Īź¤ņĒó¤į¤ė 3. źµć¤ņĶ¶Ó°¤¹¤ė¤³¤Č¤Ē„«„į„é×ĖŻ¤Ī×īßm»Æ »Ļń ?????1 »Ļń ???? (¬FŌŚræĢ) ?????1,?? ?????1 ?????1,?? ???? ???? µŲķ ????,?? ?????1,??
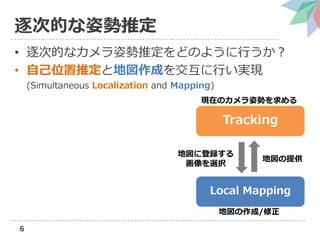
- 26. 25 2. Tracking [ŹĖŹĀ1] ¬FŌŚ¤Ī„«„į„é×ĖŻ¤ņĒó¤į¤ė 1. »Ļń¤«¤éĢŲÕµć³é³ö 2. Ē°¤Ī»Ļń¤Č¤Īµć¤Īź¤ņĒó¤į¤ė 3. źµć¤ņĶ¶Ó°¤¹¤ė¤³¤Č¤Ē„«„į„é×ĖŻ¤Ī×īßm»Æ [ŹĖŹĀ2] µŲķ¤Ė±£“ę¤¹¤ė¤«¤ĪQ¶Ø ØC °ræĢ¤Ī»Ļń¤ņ±£“ę¤¹¤ė¤Č„į„ā„ź/ÓĖćĮæµÄ¤Ė°kÉ¢¤¹ ¤ė¤æ¤į, ČßéL¤Ė¤Ź¤é¤Ź¤¤¤č¤¦¤Ė»Ļń¤ņßxk(¾¤Æ) ? KeyFrame (KF)
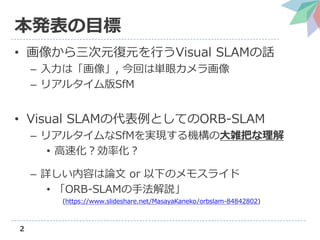
- 27. 26 3. Local Mapping [ŹĖŹĀ1] µŲķ¤Ī×÷³É Tracking¤«¤é¶É¤µ¤ģ¤æ»Ļń(KFnew)¤ņµŲķ¤Ė×·¼Ó¤¹¤ė 1. Covisibility Graph¤ĪøüŠĀ 2. GraphÉĻ¤ĒėO½Ó¤¹¤ėKFČŗ¤Č¤Ī±ČŻ^¤ĒŠĀ¤·¤¤µć¤ņ×·¼Ó 3. ¤³¤Ī¹ ģ¤Ēµć¤Č„«„į„é×ĖŻ¤Ī×īßm»Æ(Local BA) Covisibility Graph ?
- 28. 27 3. Local Mapping [ŹĖŹĀ1] µŲķ¤Ī×÷³É Tracking¤«¤é¶É¤µ¤ģ¤æ»Ļń(KFnew)¤ņµŲķ¤Ė×·¼Ó¤¹¤ė 1. Covisibility Graph¤ĪøüŠĀ 2. GraphÉĻ¤ĒėO½Ó¤¹¤ėKFČŗ¤Č¤Ī±ČŻ^¤ĒŠĀ¤·¤¤µć¤ņ×·¼Ó 3. ¤³¤Ī¹ ģ¤Ēµć¤Č„«„į„é×ĖŻ¤Ī×īßm»Æ(Local BA) Covisibility GraphøüŠĀ!
- 29. 28 3. Local Mapping [ŹĖŹĀ1] µŲķ¤Ī×÷³É Tracking¤«¤é¶É¤µ¤ģ¤æ»Ļń(KFnew)¤ņµŲķ¤Ė×·¼Ó¤¹¤ė 1. Covisibility Graph¤ĪøüŠĀ 2. GraphÉĻ¤ĒėO½Ó¤¹¤ėKFČŗ¤Č¤Ī±ČŻ^¤ĒŠĀ¤·¤¤µć¤ņ×·¼Ó 3. ¤³¤Ī¹ ģ¤Ēµć¤Č„«„į„é×ĖŻ¤Ī×īßm»Æ(Local BA) Covisibility Graph ėO½Ó¤¹¤ėKFČŗ
- 30. 29 3. Local Mapping [ŹĖŹĀ1] µŲķ¤Ī×÷³É Tracking¤«¤é¶É¤µ¤ģ¤æ»Ļń(KFnew)¤ņµŲķ¤Ė×·¼Ó¤¹¤ė 1. Covisibility Graph¤ĪøüŠĀ 2. GraphÉĻ¤ĒėO½Ó¤¹¤ėKFČŗ¤Č¤Ī±ČŻ^¤ĒŠĀ¤·¤¤µć¤ņ×·¼Ó 3. ¤³¤Ī¹ ģ¤Ēµć¤Č„«„į„é×ĖŻ¤Ī×īßm»Æ(Local BA) Covisibility Graph ×·¼Ó! ėO½Ó¤¹¤ėKFČŗ
- 31. 30 3. Local Mapping [ŹĖŹĀ1] µŲķ¤Ī×÷³É Tracking¤«¤é¶É¤µ¤ģ¤æ»Ļń(KFnew)¤ņµŲķ¤Ė×·¼Ó¤¹¤ė 1. Covisibility Graph¤ĪøüŠĀ 2. GraphÉĻ¤ĒėO½Ó¤¹¤ėKFČŗ¤Č¤Ī±ČŻ^¤ĒŠĀ¤·¤¤µć¤ņ×·¼Ó 3. ¤³¤Ī¹ ģ¤Ēµć¤Č„«„į„é×ĖŻ¤Ī×īßm»Æ (Local BA) Covisibility Graph Local¤Ź×īßm»Æ ėO½Ó¤¹¤ėKFČŗ
- 32. 31 3. Local Mapping [ŹĖŹĀ1] µŲķ¤Ī×÷³É Tracking¤«¤é¶É¤µ¤ģ¤æ»Ļń(KFnew)¤ņµŲķ¤Ė×·¼Ó¤¹¤ė 1. Covisibility Graph¤ĪøüŠĀ 2. GraphÉĻ¤ĒėO½Ó¤¹¤ėKFČŗ¤Č¤Ī±ČŻ^¤ĒŠĀ¤·¤¤µć¤ņ×·¼Ó 3. ¤³¤Ī¹ ģ¤Ēµć¤Č„«„į„é×ĖŻ¤Ī×īßm»Æ(Local BA) [ŹĖŹĀ2] µŲķ¤ĪŠŽÕż ØC KF¤ņ±OŅ¤·,ČßéL¤ŹKF¤ņ³żĶā¤¹¤ė( ¤·¤Æ) ? Arrival of the fittest
- 33. 32 4. Loop Closing [ŹĖŹĀ] Loop closing¤Ė¤č¤ėČ«Ģå×īßm»Æ 1. µŲķ¤Ė·Čė¤µ¤ģ¤æKF¤¬¼Č¤ĖŅ¤æ¤³¤Č¤¬¤¢¤ė¤«£æ ? ORBĢŲÕĮ椫¤é³É¤·¤æBag of Words (BoW) »ĻńĢŲÕĮæĶ¬Źæ¤Ī±ČŻ^ 2. Loop¤ņŹÖŖ¤·¤æ¤é¤½¤ģ¤é¤ņ½Y¤Ö¤č¤¦¤Ė×īßm»Æ ? Essential Graph¤Ė¤č¤ė„¹„±©`„ė¤ņŗ¬¤į¤æ×īßm»Æ ? Covisibility Graph
- 34. 33 4. Loop Closing [ŹĖŹĀ] Loop closing¤Ė¤č¤ėČ«Ģå×īßm»Æ 1. µŲķ¤Ė·Čė¤µ¤ģ¤æKF¤¬¼Č¤ĖŅ¤æ¤³¤Č¤¬¤¢¤ė¤«£æ ? ORBĢŲÕĮ椫¤é³É¤·¤æBag of Words (BoW) »ĻńĢŲÕĮæĶ¬Źæ¤Ī±ČŻ^ 2. Loop¤ņŹÖŖ¤·¤æ¤é¤½¤ģ¤é¤ņ½Y¤Ö¤č¤¦¤Ė×īßm»Æ ? Essential Graph¤Ė¤č¤ė„¹„±©`„ė¤ņŗ¬¤į¤æ×īßm»Æ ? Essential Graph
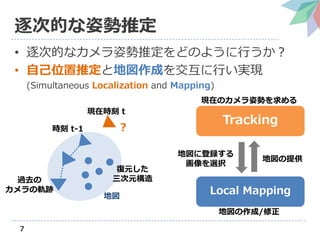
- 35. 34 4. Loop Closing [ŹĖŹĀ] Loop closing¤Ė¤č¤ėČ«Ģå×īßm»Æ 1. µŲķ¤Ė·Čė¤µ¤ģ¤æKF¤¬¼Č¤ĖŅ¤æ¤³¤Č¤¬¤¢¤ė¤«£æ ? ORBĢŲÕĮ椫¤é³É¤·¤æBag of Words (BoW) »ĻńĢŲÕĮæĶ¬Źæ¤Ī±ČŻ^ 2. Loop¤ņŹÖŖ¤·¤æ¤é¤½¤ģ¤é¤ņ½Y¤Ö¤č¤¦¤Ė×īßm»Æ ? Essential Graph¤Ė¤č¤ė„¹„±©`„ė¤ņŗ¬¤į¤æ×īßm»Æ Essential Graph Loop Closed! Sim(3) Č«Ģå×īßm»Æ
- 36. 35 ¤Ž¤Č¤į ? Visual SLAM ØC Tracking + Local Mapping + Loop Closing ? ORB-SLAM ØC ORBĢŲÕĮæ¤Ē»Ļńég¤Īź¤ņQ¶Ø¤·Čż“ĪŌŖĶŌŖ ØC Tracking¤¬µŲķ¤Ė¤¹¤Ł¤»Ļń(KeyFrame)¤ņßxk, Local Mapping¤¬¤½¤ģ¤ņµŲķ¤Ė×·¼Ó/ŠŽÕż¤¹¤ė ? Covisibility Graph¤Ė¤č¤ėLocal BA ØC Loop Closing¤ĻBoW»ĻńĢŲÕĮæ¤Ē»Ļńég¤ĪĢŲÕĮæ¤Ī ½ü¤µ¤ņÓĖ椷, Loop¤ņé]¤ø¤ė¤č¤¦¤ĖSim(3)×īßm»Æ ? Essential Graph¤ĪĄūÓĆ
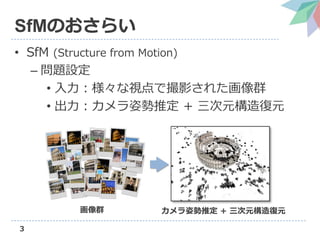
- 37. 36 ORB-SLAM¤ĪĮ¢¤ĮĪ»ÖĆ ? Visual SLAM¤Ī·Öī Direct vs Feature, Dense vs Sparse ŹÖ·Ø Direct (»ĖŲ¤ņÖ±½ÓĄūÓĆ) Feature (ĢŲÕĮæ¤ņ³é³ö¤·ĄūÓĆ) Sparse (»Ļń¤«¤éÆE¤Ė³é³ö ¤µ¤ģ¤æµć¤Ī¤ßĄūÓĆ) Direct Sparse Odometry [Engel+, 2016] ORB-SLAM [Mur-Artal+, 2015] Dense/ Semi-Dense (»ĻńČ«Ģå/ Żx¶Č¹“Åä¤Īøߤ¤ īIÓņ¤Īµć¤ņĆܤĖĄūÓĆ) LSD-SLAM [Engel+, 2014] SLAM¤Ē¤ĻĢŲ¤Ė¤Ź¤· (Optical FlowµČ)