Implements Cascaded Shadow Maps with using Texture Array
Download as PPTX, PDF3 likes2,620 views

Describe the method that implements Cascaded Shadow Maps with using Texture Array.


![Using Texture Array as RTV
struct PS_OUT_TEX_ARRAY
{
float4 Pos : SV_POSITION;
uint RTIndex : SV_RenderTargetArrayIndex;
};
[maxvertexcount(3)]
void gsDefault ( triangle GS_INPUT input[3], inout TriangleStream<PS_OUT_TEX_ARRAY> TriStream )
{
PS_OUT_TEX_ARRAY output;
for (uint i=0; i<3; i++)
{
output.Pos = mul(input[i].PosWorld,matViewProjList[i]);
output.RTIndex = N;
TriStream.Append(output[j]);
}
TriStream.RestartStrip();
}](https://image.slidesharecdn.com/cascadedshadowmapwithtexturearray-161011130430/85/Implements-Cascaded-Shadow-Maps-with-using-Texture-Array-13-320.jpg)



![cbuffer ConstantBufferShadowMap : register( b0 )
{
matrix matWorld;
matrix matViewList[MAX_CASCADE_NUM];
matrix matProjList[MAX_CASCADE_NUM];
}
struct PS_OUT_TEX_ARRAY
{
float4 Pos : SV_POSITION;
uint RTIndex : SV_RenderTargetArrayIndex;
};
struct GS_INPUT
{
float4 PosWorld: POSITION;
};
Shader Code ŌĆō Pass 0 , Shadow Caster](https://image.slidesharecdn.com/cascadedshadowmapwithtexturearray-161011130430/85/Implements-Cascaded-Shadow-Maps-with-using-Texture-Array-17-320.jpg)
![float4 vsShadowCaster( VS_INPUT_VL input ) : POSITION
{
float4 PosWorld = mul( input.Pos, matWorld );
return PosWorld;
}
[maxvertexcount(3*MAX_CASCADE_NUM)]
void gsShadowCaster( triangle GS_INPUT input[3], inout TriangleStream<PS_OUT_TEX_ARRAY> TriStream )
{
PS_OUT_TEX_ARRAY output[3];
for (uint i=0; i<MAX_CASCADE_NUM; i++ )
{
for (uint j=0; j<3; j++)
{
float4 PosView = mul(input[j].PosWorld,matViewList[i]);
PosView.z += 2.5f; // bias value
output[j].Pos = mul(PosView,matProjList[i]);
output[j].RTIndex = i;
TriStream.Append(output[j]);
}
TriStream.RestartStrip();
}
}
Shader Code ŌĆō Pass 0 , Shadow Caster](https://image.slidesharecdn.com/cascadedshadowmapwithtexturearray-161011130430/85/Implements-Cascaded-Shadow-Maps-with-using-Texture-Array-18-320.jpg)
![cbuffer ConstantBufferGBufferShader : register (b0)
{
matrix ViewInv;
matrix matShadowViewProjCascade[MAX_CASCADE_NUM];
CASCADE_CONSTNAT CascadeConst[MAX_CASCADE_NUM];
};
Texture2DArray texShadowMap: register(t2);
SamplerComparisonState samplerComp : register(s2);
void CalcIndex(out float OutIndex, in float Dist)
{
uint index = MAX_CASCADE_NUM - 1;
for (uint i = 0; i < MAX_CASCADE_NUM; i++)
{
if (Dist <= CascadeConst[i].Dist)
{
index = i;
break;
}
}
OutIndex = index;
}
Shader Code ŌĆō Pass 1 , Shadow Receiver](https://image.slidesharecdn.com/cascadedshadowmapwithtexturearray-161011130430/85/Implements-Cascaded-Shadow-Maps-with-using-Texture-Array-19-320.jpg)
![float3 CalcShadowColor3x3(Texture2DArray texShadowMap, SamplerComparisonState samplerComp, float4 PosWorld, float Dist)
{
float3 shadowColor = float3(1, 1, 1);
uint index;
CalcIndex(index, Dist);
float4 PosShadowSpace = mul(PosWorld, matShadowViewProjCascade[index]);
float4 texCoord = PosShadowSpace / PosShadowSpace.w;
float cmp_z = texCoord.z;
float litSum = 0;
int2 offset[9] = {-1,-1, 0,-1, 1,-1, -1,0, 0,0, 1,0, -1,1, 0,1, 1,1 };
for (int i = 0; i < 9; i++)
{
litSum += texShadowMap.SampleCmpLevelZero(samplerComp, float3(texCoord.xy,index), cmp_z, offset[i]);
}
float shadowValue = litSum / 9.0f;
shadowColor = lerp(float3(0,0,0), float3(1, 1, 1), shadowValue);
return shadowColor;
}
Shader Code ŌĆō Pass 1 , Shadow Receiver](https://image.slidesharecdn.com/cascadedshadowmapwithtexturearray-161011130430/85/Implements-Cascaded-Shadow-Maps-with-using-Texture-Array-20-320.jpg)




![[Ndc11 ļ░Ģļ»╝ĻĘ╝] deferred shading](https://cdn.slidesharecdn.com/ss_thumbnails/ndc11deferredshading-110602220043-phpapp01-thumbnail.jpg?width=560&fit=bounds)




![[Kgc2012] deferred forward ņØ┤ņ░ĮĒؼ](https://cdn.slidesharecdn.com/ss_thumbnails/kgc2012deferredforward-121010214035-phpapp02-thumbnail.jpg?width=560&fit=bounds)










![[Ndc12] ļłäĻĄ¼ļéś ņĢīĻĖ░ņē¼ņÜ┤ hdrĻ│╝ Ēåżļ¦ĄĒĢæ ļ░Ģļ»╝ĻĘ╝](https://cdn.slidesharecdn.com/ss_thumbnails/ndc12hdr-120426040134-phpapp02-thumbnail.jpg?width=560&fit=bounds)





![[0107 ļ░Ģļ»╝ĻĘ╝] ņēĮĻ▓ī ļ░░ņÜ░ļŖö hdrĻ│╝ Ēåżļ¦ĄĒĢæ](https://cdn.slidesharecdn.com/ss_thumbnails/0107hdr-120109223948-phpapp01-thumbnail.jpg?width=560&fit=bounds)



![[0122 ĻĄ¼Ļ▓ĮņøÉ]Ļ▓īņ×äņŚÉņä£ņØś ņČ®ļÅīņ▓śļ”¼](https://cdn.slidesharecdn.com/ss_thumbnails/random-110127021824-phpapp02-thumbnail.jpg?width=560&fit=bounds)
More Related Content
What's hot (20)
Viewers also liked (11)





![[0602 ļ░Ģļ»╝ĻĘ╝] Direct2D](https://cdn.slidesharecdn.com/ss_thumbnails/0602direct2d-110602111737-phpapp01-thumbnail.jpg?width=560&fit=bounds)
![[ņŖżļ¦łĒŖĖņŖżĒä░ļöö] ņ×¼ĒāØĻĘ╝ļ¼┤ ņל ĒĢśĻ│Ā ņ׳ņ¢┤ņÜö](https://cdn.slidesharecdn.com/ss_thumbnails/smartstudy-fullremote-201506-150622075512-lva1-app6892-thumbnail.jpg?width=560&fit=bounds)
![[NDC12] Ļ▓īņ×ä ļ¼╝ļ”¼ ņŚöņ¦äņØś ļé┤ļČĆ ļÅÖņ×æ ņøÉļ”¼ ņØ┤ĒĢ┤](https://cdn.slidesharecdn.com/ss_thumbnails/ndc12-120424073025-phpapp02-thumbnail.jpg?width=560&fit=bounds)

Similar to Implements Cascaded Shadow Maps with using Texture Array (20)

![[14.10.21] Far Cry and DX9 ļ▓łņŚŁ(shaderstudy)](https://cdn.slidesharecdn.com/ss_thumbnails/14-141023194640-conversion-gate02-thumbnail.jpg?width=560&fit=bounds)
![[ShaderX5] 4.4 Edge Masking and Per-Texel Depth Extent Propagation For Comput...](https://cdn.slidesharecdn.com/ss_thumbnails/shaderx5-44-090608100532-phpapp01-thumbnail.jpg?width=560&fit=bounds)
![[0312 ņĪ░ņ¦äĒśä] good bye dx9](https://cdn.slidesharecdn.com/ss_thumbnails/0312good-byedx9-110328070820-phpapp02-thumbnail.jpg?width=560&fit=bounds)
















More from YEONG-CHEON YOU (17)

















Implements Cascaded Shadow Maps with using Texture Array
- 1. Texture Arrayļź╝ ņØ┤ņÜ®ĒĢ£ Cascaded Shadow Maps ņ£Āņśüņ▓£ Microsoft Visual C++ MVP tw:@dgtman http://megayuchi.wordpress.com
- 2. ŌĆó Ēśä ņŗ£ņĀÉņŚÉņä£ Ļ░Ćņן ļīĆņżæņĀüņ£╝ļĪ£ ņé¼ņÜ®ļÉśĻ│Ā ņ׳ļŖö ĻĘĖļ”╝ņ×É ļĀīļŹöļ¦ü ĻĖ░ļ▓Ģ ŌĆó ĻĄ¼ĒśäĒĢśĻĖ░ ņēĮļŗż. ŌĆó Soft-shadowņ▓śļ”¼ļÅä ņēĮļŗż. Shadow Maps
- 3. ŌĆó Ļ┤æņøÉ(ĻĘĖļ”╝ņ×Éļź╝ ļō£ļ”¼ņÜĖ)ņØś ļĘ░Ļ│ĄĻ░äņŚÉņä£ Shadow CasterĻ░Ć ļÉĀ ņśżļĖīņĀØĒŖĖļōż(Ēś╣ņØĆ ņøöļō£ ņĀäņ▓┤)ņØä ļĀīļŹöļ¦ü -> Depth Buffer(Texture)ļź╝ ĻĄ¼ņä▒ ĻĄ¼Ēśä ŌĆō Pass 0 , Shadow Caster
- 4. ĻĄ¼Ēśä ŌĆō Pass 1 , Shadow Receiver ŌĆó Ļ┤æņøÉ(ĻĘĖļ”╝ņ×Éļź╝ ļō£ļ”¼ņÜ┤)ņØś View- SpaceļĪ£ ļ│ĆĒÖś. ŌĆó -1 ~ 1ņé¼ņØ┤ņØś ņóīĒæ£Ļ│ĄĻ░äņØä 0 ŌĆō 1ņé¼ņØ┤ļĪ£ ļ│ĆĒÖś. ŌĆó ļ│ĆĒÖśļÉ£ (0 ŌĆō 1ņé¼ņØ┤) ņóīĒæ£ļĪ£ Depth BufferļĪ£ļČĆĒä░ depthĻ░ÆņØä ņāśĒöīļ¦ü ŌĆó ReceiverņØś depthĻ░ÆĻ│╝ Depth BufferņØś depthĻ░ÆņØä ļ╣äĻĄÉ ŌĆó receiver_z > depth_value -> ĻĘĖļ”╝ņ×ÉĻ░Ć ļō£ļ”¼ņøīņ¦É
- 5. Shadow Map in Shadow Space On Rendering in Camera Space Shadow Map applied ŌæĀ ŌæĪ Ōæó Shader Resource View Sampling z-value from Shadow Map Compare z-value ŌæĀ and ŌæĪ per pixel.
- 6. ŌĆó ĒĢ£ ņןņØś TextureļĪ£ ļäōņØĆ Ļ│ĄĻ░äņØä Ēæ£ĒśäĒĢśĻĖ░ņŚö ĒĢ┤ņāüļÅäĻ░Ć ļČĆņĪ▒ĒĢ©. ŌĆó Texture ņé¼ņØ┤ņ”łļź╝ Ēü¼Ļ▓ī? -> ĒÆłņ¦łĒ¢źņāü, But ņä▒ļŖź ĒĢśļØĮ, GPUļ®öļ¬©ļ”¼ ļéŁļ╣ä ŌĆó PSM, TSM, LiPSM ļō▒ļō▒ ĒĢ£ ņןņØś Textureļ¦īņØä ņé¼ņÜ®ĒĢśļ®┤ņä£ ņĄ£ļīĆĒĢ£ ļéŁļ╣ä ņŚåņØ┤ ņé¼ņÜ®ĒĢśļŖö ĻĖ░ļ▓Ģļōż ļō▒ņן ĻĘĖļāź ņō░ĻĖ░ņŚö ņĢĮĻ░ä ļ¼ĖņĀ£Ļ░ĆŌĆ”
- 7. ŌĆó Shadow MapņØä ļ¦īļōż ļĢī ĒĢ£ ņןņØś TextureĻ░Ć ņĢäļŗī ņŚ¼ļ¤¼ ņןņØś TextureņŚÉ ļéśļłĀ ĻĘĖļ”¼ņ×É. ŌĆó ļĘ░Ēöäļ¤¼ņŖżĒģĆ ņśüņŚŁņØä ņŚ¼ļ¤¼ Ļ░£ņØś Ļ│ĄĻ░äņ£╝ļĪ£ ņלļØ╝ņä£ ņŚ¼ļ¤¼ ņןņØś Shadow Map Textureļź╝ ĒĢĀļŗ╣. ŌĆó Ļ░ĆĻ╣īņÜ┤ ņśüņŚŁĻ│╝ ļ©╝ ņśüņŚŁņŚÉ ļö░ļØ╝ Shadow Map ņĀĢļ░ĆļÅä ņĪ░ņĀł Ļ░ĆļŖź. ŌĆó Shadow Map ĒĢ┤ņāüļÅä ņ”ØĻ░ĆņŚÉ ļö░ļźĖ ļéŁļ╣äĻ░Ć ņĀüļŗż. Cascaded Shadow Maps
- 8. eye Shadow Light Shadow Map Texture ŌĆō Size(Width x N , Height) Ōō¬ ŌæĀ ŌæĪ Ōæó Ōō¬ ŌæĀ ŌæĪ Ōæó Ōō¬ ŌæĀ ŌæĪ Ōæó
- 9. ŌĆó Shadow Mapņ£╝ļĪ£ ņé¼ņÜ®ĒĢĀ Texture ņżĆļ╣ä ŌĆó NĻ░£ņØś Cascaded ļŗ©Ļ│äļź╝ ņé¼ņÜ®ĒĢ£ļŗżļ®┤ Texture ņé¼ņØ┤ņ”łļŖö Width x N, Height ŌĆó Width x NņØĖ ņØ┤ņ£ĀļŖö ĒĢ£ ņןņØś TextureņŚÉ Nļŗ©Ļ│äņØś Shadow MapņØä ļŗ┤ĻĖ░ ņ£äĒĢ©ņØ┤ļŗż. ŌĆó ļŻ©Ēöäļź╝ ļÅīļ®░ 0 ~ N-1ļŗ©Ļ│äĻ╣īņ¦Ć Shadow Casterļź╝ ļĀīļŹöļ¦ü. ŌĆó ļĘ░ĒżĒŖĖ ņäżņĀĢņØä ļ░öĻ┐öĻ░Ćļ®░ ĒĢ£ ņןņØś TextureņŚÉ ļ¬©ļæÉ ļŗ┤ļŖöļŗż. ŌĆó Shadow Receiverļź╝ ļĀīļŹöļ¦üĒĢĀļĢī ĒöĮņģĆņØ┤ ņ¢┤ļŖÉ Cascadedļŗ©Ļ│äņŚÉ ļōżņ¢┤Ļ░ĆļŖöņ¦Ć ņ░ŠņĢäņä£ texņóīĒæ£ņØś uņä▒ļČä offsetņĪ░ņĀĢ ŌĆó ņØ┤ĒøäļŖö ņØ╝ļ░śņĀüņØĖ Shadow MapĻ│╝ ļśæĻ░ÖņØī. ĻĄ¼Ēśä
- 10. ŌĆó Cascadedļŗ©Ļ│äņŚÉ ļö░ļØ╝ Draw CallĒÜīņłśĻ░Ć ļŖśņ¢┤ļé©. CPU ņ×ÉņøÉ ļéŁļ╣ä. ŌĆó ņĮöļō£ ļ│Ąņ×ĪĒĢ┤ņ¦É. ŌĆó ĒĢ£ļ░®ņŚÉ ļ¬©ļōĀ Cascaded ļŗ©Ļ│äļź╝ ņ▓śļ”¼ĒĢĀ ņłś ņŚåņØäĻ╣ī? Ļ░£ņäĀĒĢśĻ│Ā ņŗČņØĆ ņĀÉ
- 11. ŌĆó ļ¦É ĻĘĖļīĆļĪ£ Textureļ░░ņŚ┤ ŌĆó ļ░░ņŚ┤ņØ┤ņ¦Ćļ¦ī ļŗ©ņØ╝ Textureņ▓śļ¤╝ ļŗżļŻ░ ņłś ņ׳ļŗż. ŌĆó SRV, RTVļĪ£ ņé¼ņÜ® Ļ░ĆļŖź. ŌĆó CPUņĖĪ ņĮöļō£ņŚÉņä£ APIņé¼ņÜ® ļ░®ļ▓ĢņØĆ ņØ╝ļ░ś TextureņÖĆ ļśæĻ░Öļŗż. ŌĆó TextureļĪ£ļČĆĒä░ ņāśĒöīļ¦üņŗ£ ņóīĒæ£ņØś x,y,zņä▒ļČäņżæ zņä▒ļČäņØä ļ░░ņŚ┤ņØś ņØĖļŹ▒ņŖżļĪ£ ņé¼ņÜ® Texture Array
- 12. Texture2DArray texDiffuseArray: register(t0); SamplerState samplerDiffuse: register(s0); float4 psArrayDiffuse(PS_INPUT input) : SV_Target { float3 texCoord = float3(input.TexCoord.xy,TexArrayIndex); float4 texColor = texDiffuseArray.Sample(samplerDiffuse, texCoord); float4 outColor = texColor; return outColor; } Using Texture Array as SRV
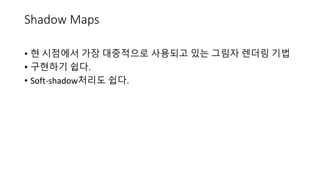
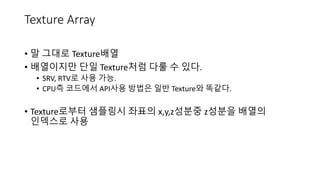
- 13. Using Texture Array as RTV struct PS_OUT_TEX_ARRAY { float4 Pos : SV_POSITION; uint RTIndex : SV_RenderTargetArrayIndex; }; [maxvertexcount(3)] void gsDefault ( triangle GS_INPUT input[3], inout TriangleStream<PS_OUT_TEX_ARRAY> TriStream ) { PS_OUT_TEX_ARRAY output; for (uint i=0; i<3; i++) { output.Pos = mul(input[i].PosWorld,matViewProjList[i]); output.RTIndex = N; TriStream.Append(output[j]); } TriStream.RestartStrip(); }
- 14. ŌĆó NĻ░£ņØś Cascadedļŗ©Ļ│äĻ░Ć ņ׳ņØä ļĢī ņé¼ņØ┤ņ”ł Width , HeightņŚÉ ļ░░ņŚ┤ņØ┤ NĻ░£ņØĖ Texture ņāØņä▒ ŌĆó ņØ╝ļ░ś TextureņÖĆ ļ¦łņ░¼Ļ░Ćņ¦ĆļĪ£ RTVņÖĆ SRVņāØņä▒ ŌĆó ShaderņĢłņŚÉņä£ ņ¢┤ļŖÉ Cascaded ļŗ©Ļ│äņŚÉ ĒżĒĢ©ļÉśļŖöņ¦Ć Ļ│äņé░ĒĢśĻ│Ā ĻĘĖ ņØĖļŹ▒ņŖż Ļ░ÆņØä ĒģŹņŖżņ│É ņóīĒæ£ņØś zņä▒ļČäņ£╝ļĪ£ ņé¼ņÜ® Texture Arraryļź╝ Shadow MapsņŚÉ ņĀüņÜ®
- 15. UINT Width = DEFAULT_SHADOW_MAP_WIDTH; UINT Height = DEFAULT_SHADOW_MAP_HEIGHT; UINT ArrayCount = MAX_CASCADE_NUM; D3D11_TEXTURE2D_DESC texDesc = { Width, Height, 1, ArrayCount, DXGI_FORMAT_R32_TYPELESS, 1, 0, D3D11_USAGE_DEFAULT, D3D11_BIND_DEPTH_STENCIL | D3D11_BIND_SHADER_RESOURCE, 0, 0 }; D3D11_DEPTH_STENCIL_VIEW_DESC dsvDesc = { DXGI_FORMAT_D32_FLOAT, D3D11_DSV_DIMENSION_TEXTURE2DARRAY, 0 }; dsvDesc.Texture2DArray.FirstArraySlice = 0; dsvDesc.Texture2DArray.ArraySize = ArrayCount; dsvDesc.Texture2DArray.MipSlice = 0; D3D11_SHADER_RESOURCE_VIEW_DESC srvDesc = { DXGI_FORMAT_R32_FLOAT, D3D11_SRV_DIMENSION_TEXTURE2DARRAY, 0, 0 }; srvDesc.Texture2DArray.FirstArraySlice = 0; srvDesc.Texture2DArray.ArraySize = ArrayCount; srvDesc.Texture2DArray.MipLevels = 1; srvDesc.Texture2DArray.MostDetailedMip = 0; ID3D11Texture2D* pTex = nullptr; HRESULT hr = m_pD3DDevice->CreateTexture2D(&texDesc, NULL, &pTex); if (FAILED(hr)) __debugbreak(); hr = m_pD3DDevice->CreateDepthStencilView(pTex, &dsvDesc, &m_pShadowMapDSV); if (FAILED(hr)) __debugbreak(); hr = m_pD3DDevice->CreateShaderResourceView(pTex, &srvDesc, &m_pShadowMapSRV); if (FAILED(hr)) __debugbreak(); pTex->Release(); Creating SRV,DSV from Texture Array
- 16. Texture Texture Array // set matrix for shadow-space, SetCascadedLightSpaceAll(N); // Draw shadow casters to Depth Buffer DrawShadowCasters(); for (DWORD i=0; i<N; i++) { // set matrix for shadow-space, SetCascadedLightSpace(i); // Draw shadow casters to Depth Buffer DrawShadowCasters(); } CPU Code ŌĆō Shadow Caster ļĀīļŹöļ¦ü ļ╣äĻĄÉ
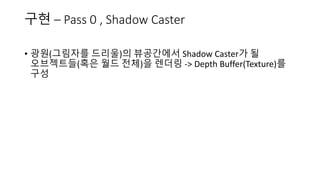
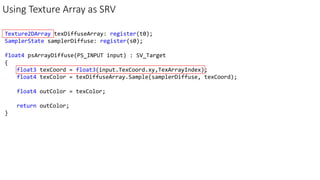
- 17. cbuffer ConstantBufferShadowMap : register( b0 ) { matrix matWorld; matrix matViewList[MAX_CASCADE_NUM]; matrix matProjList[MAX_CASCADE_NUM]; } struct PS_OUT_TEX_ARRAY { float4 Pos : SV_POSITION; uint RTIndex : SV_RenderTargetArrayIndex; }; struct GS_INPUT { float4 PosWorld: POSITION; }; Shader Code ŌĆō Pass 0 , Shadow Caster
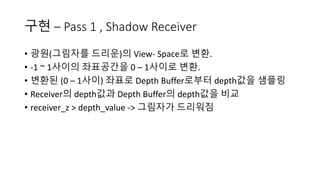
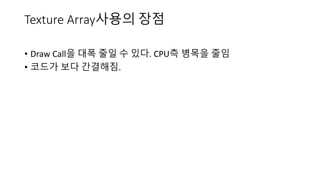
- 18. float4 vsShadowCaster( VS_INPUT_VL input ) : POSITION { float4 PosWorld = mul( input.Pos, matWorld ); return PosWorld; } [maxvertexcount(3*MAX_CASCADE_NUM)] void gsShadowCaster( triangle GS_INPUT input[3], inout TriangleStream<PS_OUT_TEX_ARRAY> TriStream ) { PS_OUT_TEX_ARRAY output[3]; for (uint i=0; i<MAX_CASCADE_NUM; i++ ) { for (uint j=0; j<3; j++) { float4 PosView = mul(input[j].PosWorld,matViewList[i]); PosView.z += 2.5f; // bias value output[j].Pos = mul(PosView,matProjList[i]); output[j].RTIndex = i; TriStream.Append(output[j]); } TriStream.RestartStrip(); } } Shader Code ŌĆō Pass 0 , Shadow Caster
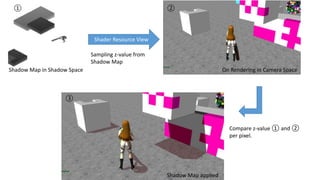
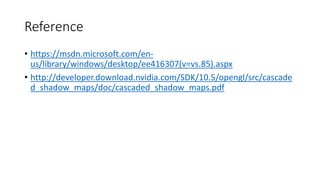
- 19. cbuffer ConstantBufferGBufferShader : register (b0) { matrix ViewInv; matrix matShadowViewProjCascade[MAX_CASCADE_NUM]; CASCADE_CONSTNAT CascadeConst[MAX_CASCADE_NUM]; }; Texture2DArray texShadowMap: register(t2); SamplerComparisonState samplerComp : register(s2); void CalcIndex(out float OutIndex, in float Dist) { uint index = MAX_CASCADE_NUM - 1; for (uint i = 0; i < MAX_CASCADE_NUM; i++) { if (Dist <= CascadeConst[i].Dist) { index = i; break; } } OutIndex = index; } Shader Code ŌĆō Pass 1 , Shadow Receiver
- 20. float3 CalcShadowColor3x3(Texture2DArray texShadowMap, SamplerComparisonState samplerComp, float4 PosWorld, float Dist) { float3 shadowColor = float3(1, 1, 1); uint index; CalcIndex(index, Dist); float4 PosShadowSpace = mul(PosWorld, matShadowViewProjCascade[index]); float4 texCoord = PosShadowSpace / PosShadowSpace.w; float cmp_z = texCoord.z; float litSum = 0; int2 offset[9] = {-1,-1, 0,-1, 1,-1, -1,0, 0,0, 1,0, -1,1, 0,1, 1,1 }; for (int i = 0; i < 9; i++) { litSum += texShadowMap.SampleCmpLevelZero(samplerComp, float3(texCoord.xy,index), cmp_z, offset[i]); } float shadowValue = litSum / 9.0f; shadowColor = lerp(float3(0,0,0), float3(1, 1, 1), shadowValue); return shadowColor; } Shader Code ŌĆō Pass 1 , Shadow Receiver
- 21. ŌĆó Draw CallņØä ļīĆĒÅŁ ņżäņØ╝ ņłś ņ׳ļŗż. CPUņĖĪ ļ│æļ¬®ņØä ņżäņ×ä ŌĆó ņĮöļō£Ļ░Ć ļ│┤ļŗż Ļ░äĻ▓░ĒĢ┤ņ¦É. Texture Arrayņé¼ņÜ®ņØś ņןņĀÉ
- 22. ŌĆó Ļ░üĻ░üņØś Light View Space Ēöäļ¤¼ņŖżĒģĆņŚÉ ļīĆĒĢ£ culling ŌĆó Ēöäļ¤¼ņŖżĒģĆņŚÉ ļīĆĒĢ£ cullingņØä ļ©╝ņĀĆ ņłśĒ¢ēĒĢ£ Ēøä Constant Bufferļź╝ ĒåĄĒĢ┤ bit flagsļĪ£ ņĀäļŗ¼. ŌĆó Geometry ShaderņŚÉņä£ 0,1,2,3ŌĆ” Ļ░ü ļ╣äĒŖĖļź╝ ņ▓┤Ēü¼ĒĢśļ®░ 0 ŌĆō NĻ╣īņ¦ĆņØś Cascadedļŗ©Ļ│äņŚÉ ĒżĒĢ©ļÉśļŖöņ¦Ćļź╝ Ļ▓Ćņé¼. ļ╣äĒŖĖĻ░Ć 0ņØ┤ļ®┤ ĻĘĖļīĆļĪ£ ĒÅÉĻĖ░. ŌĆó GPUņāüņŚÉņä£ Ēü┤ļ”¼ĒĢæņØ┤ ņØ┤ļŻ©ņ¢┤ņ¦Ćļ»ĆļĪ£ CPUņĖĪņŚÉņä£ ļ│äļÅäņØś Cullingņ×æņŚģņŚÉ ĒĢäņÜöĒĢ£ ņŗ£Ļ░äņØä Ļ░ÉņĢłĒĢśļ®┤ ĻĄ│ņØ┤ ĒĢäņÜöĻ░Ć ņŚåņØäņ¦ĆļÅä???? ņČöĻ░ĆņĀüņØĖ ņĄ£ņĀüĒÖö