




![ÖŲĮ¦¤Ė¤č¤źÉķĢå¤Ļ³£¤ĖćUÖ±ĻĀ¤Ų æŅż¤µ
¤ģ¤Ę¤¤¤ė”£
”©¤Ź×ĖŻ?Ó×÷¤ņ¾S³Ö?¾@¾A¤¹¤ė¤æ¤į¤Ė±ŲŅŖ¤Ź
½īĮ¦
¶ÉßŌ£ĪÄĖū£ŗ½ī¾o£Ø×ĖŻ½ī¾o£©¤Ė¤Ä¤¤¤Ę évĪ÷Ąķѧ 2010
½īČā¤Ė¤č¤Ć¤Ę°k]¤µ¤ģ¤ėév¹„ā©`„į„ó„Ȥ¬”¢ÖŲĮ¦¤Ė
¤č¤Ć¤ĘÉś¤ø¤ėév¹„ā©`„į„ó„ȤĖ“ņ¤ĮŁ¤Ę¤ė¤«¤É¤¦¤«
¤ĒŌuż¤Ē¤¤ė”£
Ć×äÖŠ¤ĪÕĻŗ¦?²”B¤Č¤½¤ĪĄķŃ§Æ·Ø„¢„ׄķ©`„Į ĪĹāĢĆ
æ¹ÖŲĮ¦ÉģÕ¹Ī»¤ņ±£¤Ä£ØÖŲŠÄ¤ņøߤƱ£¤Ć¤Ę¤Ŗ¤±¤ė£©ÄÜĮ¦
©×ĖŻ½ī¾o©
ÖŲĮ¦¤Čæ¹ÖŲĮ¦ÉģÕ¹»īÓ](https://image.slidesharecdn.com/6-180624130710/85/-6-320.jpg)


































































![¤Ž¤Č¤į
? ½ń»Ų”¢ĀżŠŌĘŚĆ×ä֊ʬĀéÆw»¼ÕߤĪ×ĖŻÖĘÓł¤ĪøÄÉʤņķ
¤ė¤³¤Č¤Ī¤č¤ź”¢iŠŠÄÜĮ¦¤ĪøÄÉʤņÕJ¤į¤æ”£
? Ö¢Ąż¤Ļ×ĖŻÖĘÓł¤äiŠŠÄÜĮ¦¤ĪøÄÉʤņÕJ¤į¤æ¤³¤Č¤Ė¤č¤ź”¢
ÓŃČĖ¤Č¤ĪŹ³ŹĀ»į¤Ė²Ī¼Ó¤·¤æ¤ź”¢ĶĀ¤ĖĻņ¤±¤æČ”¤ź½M¤ß
¤ņŠŠ¤¦¤Ź¤ÉÉē»į¤Ų¤Ī²Ī¼Ó¤ĖÄæ¤ņĻņ¤±¤ė¤³¤Č¤¬æÉÄܤČ
¤Ź¤Ć¤Ę¤¤¤ė”£
? ½ńįį¤ā»¼ÕߤĪĒ±ŌŚÄÜĮ¦¤ņ°k]¤·¾A¤±¤ė¤³¤Č¤¬¤Ē¤¤ė¤č
¤¦év¤ļ¤Ć¤Ę¤¤¤¤æ¤¤”£](https://image.slidesharecdn.com/6-180624130710/85/-74-320.jpg)

















![SSII2022 [TS2] ×ŌĀÉŅĘÓ„ķ„܄ƄȤĪ¤æ¤į¤Ī„ķ„Ü„Ć„Č„Ó„ø„ē„ó? „Ŗ©`„ׄ󄽩`„¹¤Ī×ŌÓß\Ü„½„Õ„ČAutoware¤ņ½āÕh ?](https://cdn.slidesharecdn.com/ss_thumbnails/ts2ssii2022r4-220607054405-1c6b5fc2-thumbnail.jpg?width=560&fit=bounds)












More Related Content
What's hot (20)
Similar to ×ĖŹĘ„³„ó„Č„ķ©`„ė¤Ė¤Ä¤¤¤Ę (8)






Recently uploaded (10)










×ĖŹĘ„³„ó„Č„ķ©`„ė¤Ė¤Ä¤¤¤Ę
- 6. ÖŲĮ¦¤Ė¤č¤źÉķĢå¤Ļ³£¤ĖćUÖ±ĻĀ¤Ų æŅż¤µ ¤ģ¤Ę¤¤¤ė”£ ”©¤Ź×ĖŻ?Ó×÷¤ņ¾S³Ö?¾@¾A¤¹¤ė¤æ¤į¤Ė±ŲŅŖ¤Ź ½īĮ¦ ¶ÉßŌ£ĪÄĖū£ŗ½ī¾o£Ø×ĖŻ½ī¾o£©¤Ė¤Ä¤¤¤Ę évĪ÷Ąķѧ 2010 ½īČā¤Ė¤č¤Ć¤Ę°k]¤µ¤ģ¤ėév¹„ā©`„į„ó„Ȥ¬”¢ÖŲĮ¦¤Ė ¤č¤Ć¤ĘÉś¤ø¤ėév¹„ā©`„į„ó„ȤĖ“ņ¤ĮŁ¤Ę¤ė¤«¤É¤¦¤« ¤ĒŌuż¤Ē¤¤ė”£ Ć×äÖŠ¤ĪÕĻŗ¦?²”B¤Č¤½¤ĪĄķŃ§Æ·Ø„¢„ׄķ©`„Į ĪĹāĢĆ æ¹ÖŲĮ¦ÉģÕ¹Ī»¤ņ±£¤Ä£ØÖŲŠÄ¤ņøߤƱ£¤Ć¤Ę¤Ŗ¤±¤ė£©ÄÜĮ¦ ©×ĖŻ½ī¾o© ÖŲĮ¦¤Čæ¹ÖŲĮ¦ÉģÕ¹»īÓ
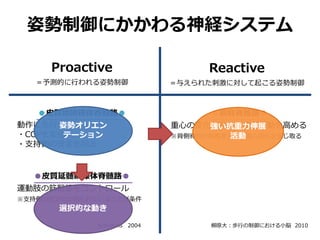
- 18. Proactive £½ÓčyµÄ¤ĖŠŠ¤ļ¤ģ¤ė×ĖŻÖĘÓł Reactive £½Óė¤Ø¤é¤ģ¤æ“Ģ¼¤¤Ė¤·¤ĘĘš¤³¤ė×ĖŻÖĘÓł ”ńʤŁ|ņ¾WĢå¼¹ólĀ·”ń Ó×÷¤ĖĻČŠŠ¤·¤Ę ?COP¤ņä»Æ ?Ö§³ÖȤĪ°²¶Ø¤ņķ¤ė ”ńʤŁ|ŃÓól¾WĢå¼¹ólĀ·”ń ß\ÓÖ«¤Ī½ī¾o¤ņ„³„ó„Č„ķ©`„ė ”łÖ§³ÖȤĪ°²¶Ø»Æ¤¬ķ¤é¤ģ¤Ę¤¤¤ė¤³¤Č¤¬Ģõ¼ž ”ńĒ°Ķ„¼¹ólĀ·”ń ÖŲŠÄ¤Īä»Æ¤Ė¤·¤ĘÉģÕ¹»īÓ¤ņøߤį¤ė ”ł±³Č¼¹ólŠ”ĆĀ·¤ņ½é¤·¤ĘÖŲŠÄä»Æ¤ņøŠ¤øČ”¤ė Schepens 2004 ĮųŌ“ó£ŗiŠŠ¤ĪÖĘÓł¤Ė¤Ŗ¤±¤ėŠ”Ć 2010 ×ĖŻ„Ŗ„ź„Ø„ó „Ę©`„·„ē„ó ßxkµÄ¤ŹÓ¤ ¤¤æ¹ÖŲĮ¦ÉģÕ¹ »īÓ ×ĖŹĘÖĘÓł¤Ėév¤ļ¤ėÉń½U„·„¹„Ę„ą
- 26. ? ×ć²æÄŚŌŚ½ī¤Ē¤¢¤ėÄøÖŗĶāܽī¤Č¶ĢÄøÖŗĒü½ī¤ĪCÄܵĶĻĀ ¤Ė¤č¤ź”¢iŠŠĮ¢½ÅĘŚ¤Ė¤Ŗ¤±¤ėµŚ1”«3ÖŗīIÓņ¤ĪŗÉÖŲĮ椬 µĶĻĀ¤¹¤ė”£ ? ÄøÖŗĶāܽī¤ņÖ÷¤Č¤·¤æ×ć²æÄŚŌŚ½ī¤Ī §æsĮ¦¤ņ»Æ¤¹¤ė ¤³¤Č¤ĒiŠŠĮ¢½ÅĘŚ¤Ė¤Ŗ¤±¤ė×ćév¹µ×Ēü„ā©`„į„ó„Ȥņä »Æ¤µ¤»¤ė¤³¤Č¤Ź¤Æ»ŲÄŚ„ā©`„į„ó„ȤĪ¤ßÓŠŅā¤Ź¼Ó¤ņ¤ā ¤æ¤é¤·¤æ”£ ł“å¤é 2016”¢ł“å¤é2017 ×ć²æÄŚŌŚ½ī¤Ī»īÓ
- 27. ? ×ĖŻ¤Ī„Ŗ„ź„Ø„ó„Ę©`„·„ē„ó¤Ė¤č¤ź”¢ß\Ó·½Ļņ ¤ņ¶Ø¤į¤ė¤³¤Č¤¬¤Ē¤¤ė”£ ? ÖŲĮ¦ĻĀ¤Ē×ĖŻ?ß\Ó¤ņ„³„ó„Č„ķ©`„ė¤¹¤ė¤æ¤į ¤Ė¤Ļ×ćµ×¤«¤é¤ĪĒéó£Ø„Ŗ„ź„Ø„ó„Ę©`„·„ē„ó£© ¤¬ÖŲŅŖ¤Ē¤¢¤ė”£ ? ×ćµ×¤«¤é¤Ī„Ŗ„ź„Ø„ó„Ę©`„·„ē„ó¤¬ßmĒŠ¤ĖµĆ¤é ¤ģ¤ė¤æ¤į¤Ė¤Ļ”¢×ć²æ¤ĪßxkµÄ¤Ź»īÓ¤¬±ŲŅŖ¤Č ¤Ź¤ė”£ ŅŖ¼s¢Ł
- 35. £ŗReactive £ŗProactive Į¢Ī»£ØiŠŠé_Ź¼Ē°£© Į¢½ÅĻą ß[½ÅĻą ”ńĮ¢½ÅĻą¤Čß[½ÅĻą¤Īß`¤¤”ń iŠŠ¤ĪÉń½U„·„¹„Ę„ą
- 37. Į¢Ī»£ØiŠŠé_Ź¼Ē°£© Į¢½ÅĻą ß[½ÅĻą ”ńĮ¢½ÅĻą¤Čß[½ÅĻą¤Īß`¤¤”ń iŠŠ¤ĪÉń½U„·„¹„Ę„ą £ŗReactive £ŗProactive
- 38. ׳Ī» ėxµī Į¢Ī»ĢåÖĒ°A Į¢Ī» ׳Ī»ÖŲŠÄ¤ņĻĀ¤²¤ė ×Å׳ £ŗReactive £ŗProactive ĘšĮ¢?×Å׳¤ĪÉń½U„·„¹„Ę„ą
- 41. ׳Ī» ėxµī Į¢Ī»ĢåÖĒ°A Į¢Ī» ׳Ī»ÖŲŠÄ¤ņĻĀ¤²¤ė ×Å׳ ĘšĮ¢?×Å׳¤ĪÉń½U„·„¹„Ę„ą £ŗReactive £ŗProactive
- 42. ”ńÕnī}ßxk¤Ī„Ż„¤„ó„Č”ń ? ÄæĖ¤Č¤Ź¤ėÓ×÷¤¬¤É¤Ī¤č¤¦¤Ź³ÉŅŖĖŲ¤ņ³Ö¤Ć¤æÓ×÷ ¤Ź¤Ī¤«£æ ? ×ĖŻ„³„ó„Č„ķ©`„ė or ßxkŠŌ ? Éń½U„·„¹„Ę„ą or ½ī¶Ģæs£ØBiomechanical£© ? IČŠŌ or Ņ»ČŠŌ ? Reactive or Proactive ? régµÄä»Æ¤Ļ¤É¤Ī³Ģ¶Č¤«£æ Ōuż¤Ī„Ż„¤„ó„Č
- 52. ×ĖŻÖĘÓł¤Ė¤«¤«¤ļ¤ėÉń½U„·„¹„Ę„ą Proactive £½ÓčyµÄ¤ĖŠŠ¤ļ¤ģ¤ė×ĖŻÖĘÓł Reactive £½Óė¤Ø¤é¤ģ¤æ“Ģ¼¤¤Ė¤·¤ĘĘš¤³¤ė×ĖŻÖĘÓł ”ńʤŁ|ņ¾WĢå¼¹ólĀ·”ń Ó×÷¤ĖĻČŠŠ¤·¤Ę ?COP¤ņä»Æ ?Ö§³ÖȤĪ°²¶Ø¤ņķ¤ė ”ńʤŁ|ŃÓól¾WĢå¼¹ólĀ·”ń ß\ÓÖ«¤Ī½ī¾o¤ņ„³„ó„Č„ķ©`„ė ”łÖ§³ÖȤĪ°²¶Ø»Æ¤¬ķ¤é¤ģ¤Ę¤¤¤ė¤³¤Č¤¬Ģõ¼ž ”ńĒ°Ķ„¼¹ólĀ·”ń ÖŲŠÄ¤Īä»Æ¤Ė¤·¤ĘÉģÕ¹»īÓ¤ņøߤį¤ė ”ł±³Č¼¹ólŠ”ĆĀ·¤ņ½é¤·¤ĘÖŲŠÄä»Æ¤ņøŠ¤øČ”¤ė Schepens 2004 ĮųŌ“ó£ŗiŠŠ¤ĪÖĘÓł¤Ė¤Ŗ¤±¤ėŠ”Ć 2010 ×ĖŻ„Ŗ„ź„Ø„ó „Ę©`„·„ē„ó ßxkµÄ¤ŹÓ¤ ¤¤æ¹ÖŲĮ¦ÉģÕ¹ »īÓ
- 56. Ö¢Ąż½B½é ? 40“śÅ®ŠŌ ? Ō\¶ĻĆū£ŗ×󱻣³öŃŖ ? ÕĻŗ¦Ćū£ŗÓŅʬĀéÆw Ź§ÕZÖ¢ ? ¬F²”s£ŗ Ę½³É24Äź¤ĖĆ³öŃŖ¤ņ°kÖ¢¤·”¢ÓŅʬĀéÆw¤ČŹ§ÕZÖ¢¤ņ³Ź¤·¤æ”£ ĖūŌŗ¤Ė¤Ę£¶„öŌĀég¤ĪČėŌŗ„ź„ĻgŹ©įį”¢×ŌÕ¬ĶĖŌŗ¤Č¤Ź¤Ć¤æ ¤¬”¢øü¤Ź¤ėøÄÉʤņÄæÖø¤·”¢×ŌÕ¬ĶĖŌŗ£±ßLégįį¤č¤źµ±ŌŗĶā Ą“„ź„Ļé_Ź¼¤Č¤Ź¤Ć¤æ”£
- 63. ÖĪƄׄķ„°„é„ą ? ×ĖŻ„³„ó„Č„ķ©`„ė¤Ė¤Ŗ¤¤¤ĘReactive¤ĪŅŖĖŲ¤¬¤¤ ?é_Ź¼×ĖŻ¤Č¤·¤ĘÅPĪ»¤ņßxk£ØReactive¤ņpÉŁ¤µ¤»”¢ ĀéÆwȤ«¤é¤Ī¹ĢÓŠøŠŅĒéó¤ņČ”¤źŽz¤ß¤ä¤¹¤Æ¤¹¤ė£© ¢Ł×ć²æ¤Ī»īŠŌ»Æ ÄŚŌŚ½ī¤ņŁx»ī¤¹¤ė¤³¤Č¤Ē“²Ć꤫¤éÕż¤·¤¤øŠŅĒé󤬏ܤ±Č”¤ģ¤ė¤č¤¦ “Ł¤¹”£ ¢ŚCrook lying Gravicepter¤ņ“Ģ¼¤¤·¤Ź¤¬¤égŹ©¤·”¢Ó×÷¤ĖĻČŠŠ¤·¤æĢåÖ¤Ī°²¶Ø¤Č ŗÉÖŲ“Ģ¼¤¤Ė¤¹¤ė¹Éév¹ÉģÕ¹¤ņ“Ł¤¹”£ ?Bipedal standing¤ŲĻņ¤±¤æŹä ¢Ū„Ņ„é„į½ī¤Ī»īŠŌ»Æ ×ć²æ¤«¤éßxkµÄ¤Ė¹ĢÓŠøŠŅĒé󤬏ܤ±Č”¤ģ¤ė¤č¤¦“Ł¤¹”£
- 64. ? Bipedal standing¤«¤éSingle leg standing¤Ų £ØIČ»īÓ¤«¤éʬȻīÓ¤Ų×ĖŻ¤ņäøü¤·¤Ź¤¬¤éÕnī}¤Ī ėyŅ׶ȤņÕ{Õū£© ¢Ü³ĘµÄ¤ŹĘšĮ¢©\×Å׳Ó×÷¤ĪÕT§ ĘšĮ¢Ó×÷?Ē°Ķ„¼¹ólĀ·¤Ė¤č¤ė¤¤æ¹ÖŲĮ¦ÉģÕ¹»īÓ¤ņŁx»ī¤¹¤ė”£ ×Å׳Ó×÷?ʤŁ|ŃÓól¾WĢå¼¹ólĀ·¤Ė¤č¤ė×ĖŻ½ī¾o¤Ī„³„ó„Č„ķ©`„ė ¤ņ“Ł¤¹”£ ¢ŻĀéÆwČĻĀÖ«¤ĪStepÓ×÷ Į¢Ī»¤Ė¤Ę·ĒĀéÆwȤņæ¹ÖŲĮ¦ÉģÕ¹Ī»¤Ė±£¤Į¤Ź¤¬¤éĀéÆwČĻĀÖ«¤ĪStep¤ņ ÕT§¤¹¤ė¤³¤Č¤Ē·ĒĀéÆwȤĪʤŁ|ņ¾WĢå¼¹ólĀ·¤ĪøÄÉʤņķ¤ė”£ ”ł„·„Ź„ׄ¹¤ņ»Æ¤·¤Ę¤¤¤Æ¤æ¤į¤Ė”¢×ŌÕ¬¤Ė¤Ę³ĘµÄ¤Ź ĘšĮ¢©\×Å׳Ó×÷¤ņgŹ©¤¹¤ė¤č¤¦Öø§”£
- 74. ¤Ž¤Č¤į ? ½ń»Ų”¢ĀżŠŌĘŚĆ×ä֊ʬĀéÆw»¼ÕߤĪ×ĖŻÖĘÓł¤ĪøÄÉʤņķ ¤ė¤³¤Č¤Ī¤č¤ź”¢iŠŠÄÜĮ¦¤ĪøÄÉʤņÕJ¤į¤æ”£ ? Ö¢Ąż¤Ļ×ĖŻÖĘÓł¤äiŠŠÄÜĮ¦¤ĪøÄÉʤņÕJ¤į¤æ¤³¤Č¤Ė¤č¤ź”¢ ÓŃČĖ¤Č¤ĪŹ³ŹĀ»į¤Ė²Ī¼Ó¤·¤æ¤ź”¢ĶĀ¤ĖĻņ¤±¤æČ”¤ź½M¤ß ¤ņŠŠ¤¦¤Ź¤ÉÉē»į¤Ų¤Ī²Ī¼Ó¤ĖÄæ¤ņĻņ¤±¤ė¤³¤Č¤¬æÉÄÜ¤Č ¤Ź¤Ć¤Ę¤¤¤ė”£ ? ½ńįį¤ā»¼ÕߤĪĒ±ŌŚÄÜĮ¦¤ņ°k]¤·¾A¤±¤ė¤³¤Č¤¬¤Ē¤¤ė¤č ¤¦év¤ļ¤Ć¤Ę¤¤¤¤æ¤¤”£
Editor's Notes
- #7: ×ĖŹĘ½ī½ōÕŤĻ”¢Ē°»ŲÕhĆ÷¤·¤æĶؤź”¢ÖŲĮ¦¤Ė湤·¤ĘÖŲŠÄ¤ņøߤƱ£¤Ć¤Ę¤Ŗ¤ÆÄÜĮ¦¤ĪŹĀ¤ņÖø¤·¤Ž¤¹”£
- #22: „Ŗ„ź„Ø„ó„Ę©`„·„ē„ó¤Ė¤Ä¤¤¤Ę
- #40: “²·“Į¦×÷ÓĆ¾¤¬éL¤Æ¤Ź¤ė?æ¹ÖŲĮ¦ÉģÕ¹»īÓ¤ņøߤį¤ė±ŲŅŖ¤¬¤¢¤ė”£ “²·“Į¦×÷ÓĆ¾¤¬¶Ģ¤Æ¤Ź¤ė?æ¹ÖŲĮ¦ÉģÕ¹»īÓ¤ņ¤ä¤į¤ė£Ø¾¤į¤ė£©±ŲŅŖ¤¬¤¢¤ė”£ ¾¤į¤ėöŗĻ”¢Ņ»Ż¤Ė¤ę¤ė¤į¤ė¤Č×ĖŻ¤ņ±£³Ö¤¹¤ė¤³¤Č¤¬Ą§ėy”£ „³„ó„Č„ķ©`„ė¤·¤Ź¤¬¤é¾¤į¤ė±ŲŅŖ¤¬¤¢¤ė”£
- #42: Ķ¬¤ø×ĖŹĘ£ØĄėµī¤ČÖŲŠÄ¤ņĻĀ¤²¤ė£©¤Ē¤āÉń½U„·„¹„Ę„ą¤ĻŅģ¤Ź¤ė